2. Wprowadzenie do robota
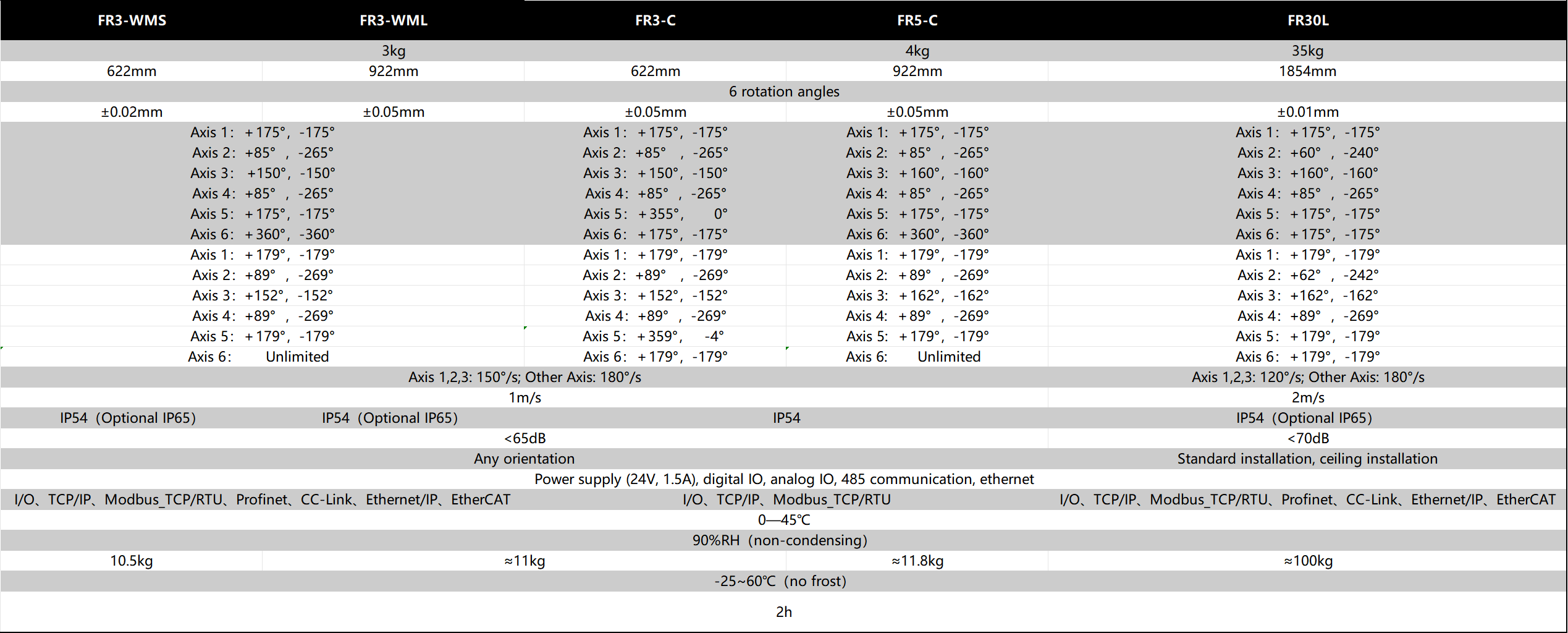
2.1. Parametry podstawowe
Tabela 2.1-1 Podstawowe parametry robota
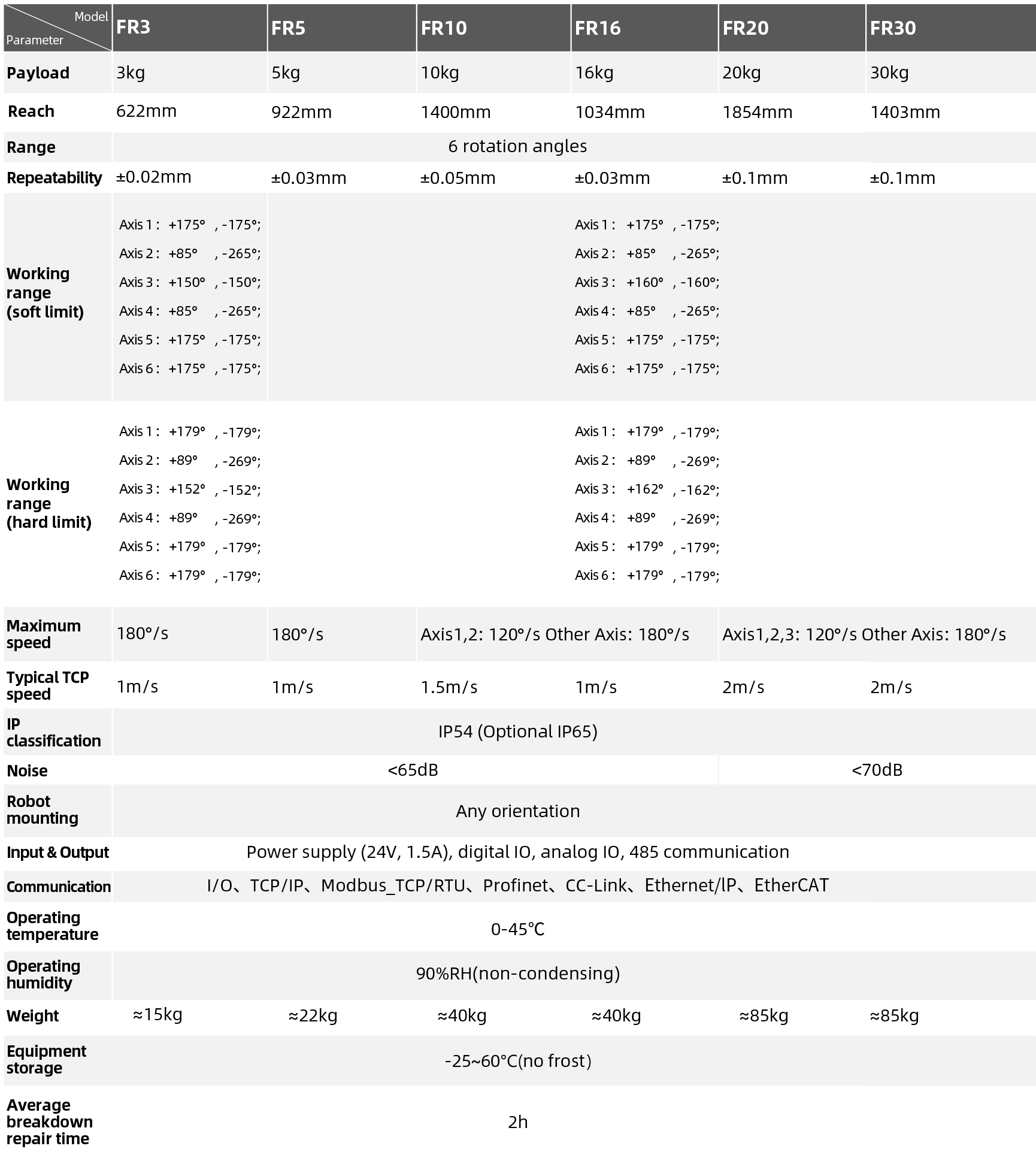
Ważne
Podczas wykonywania transformacji pozy lub układu współrzędnych w robotach serii FR, kolejność obrotów kątów w obliczeniach macierzy transformacji jednorodnej to „ZYX” pływającego układu współrzędnych.
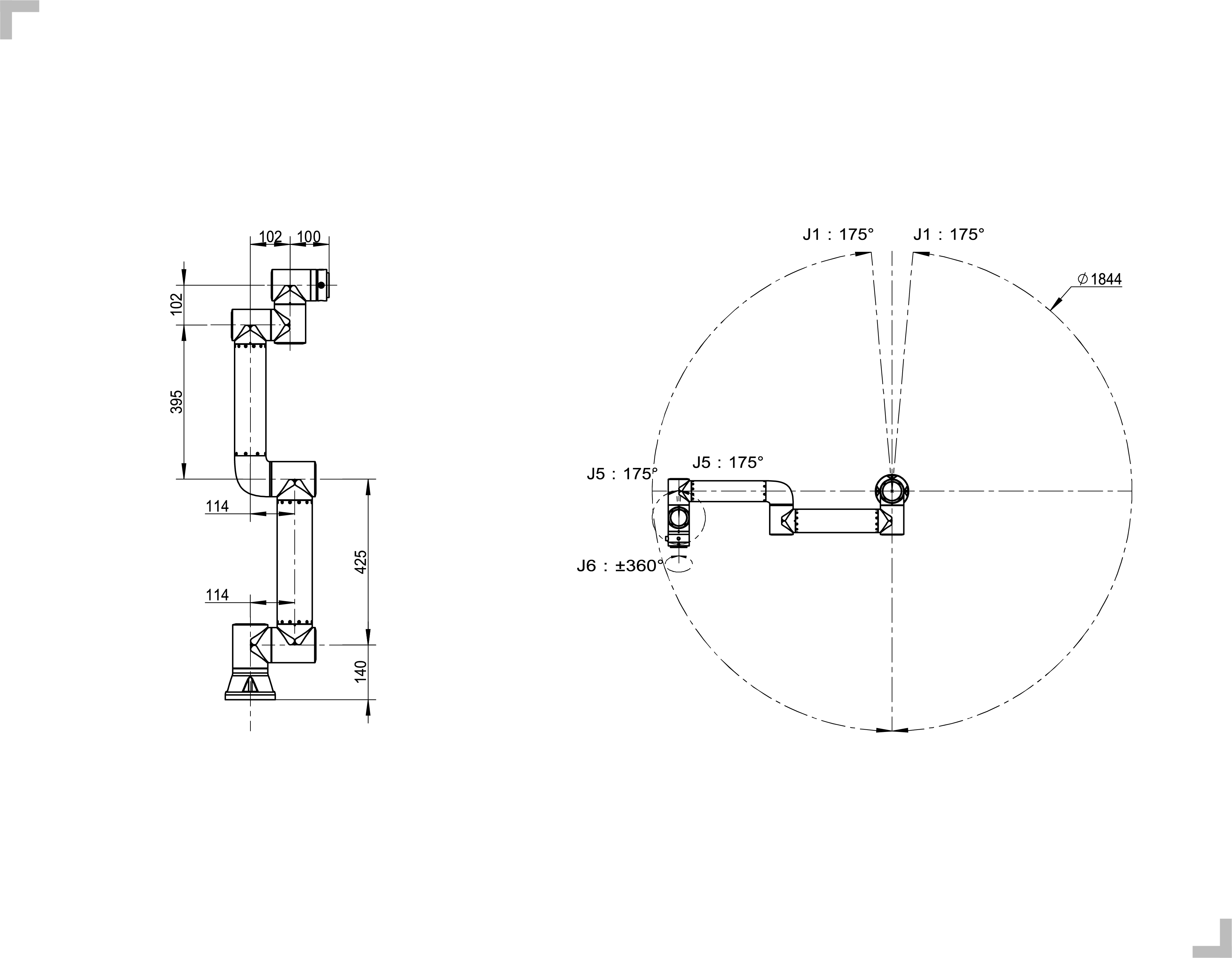
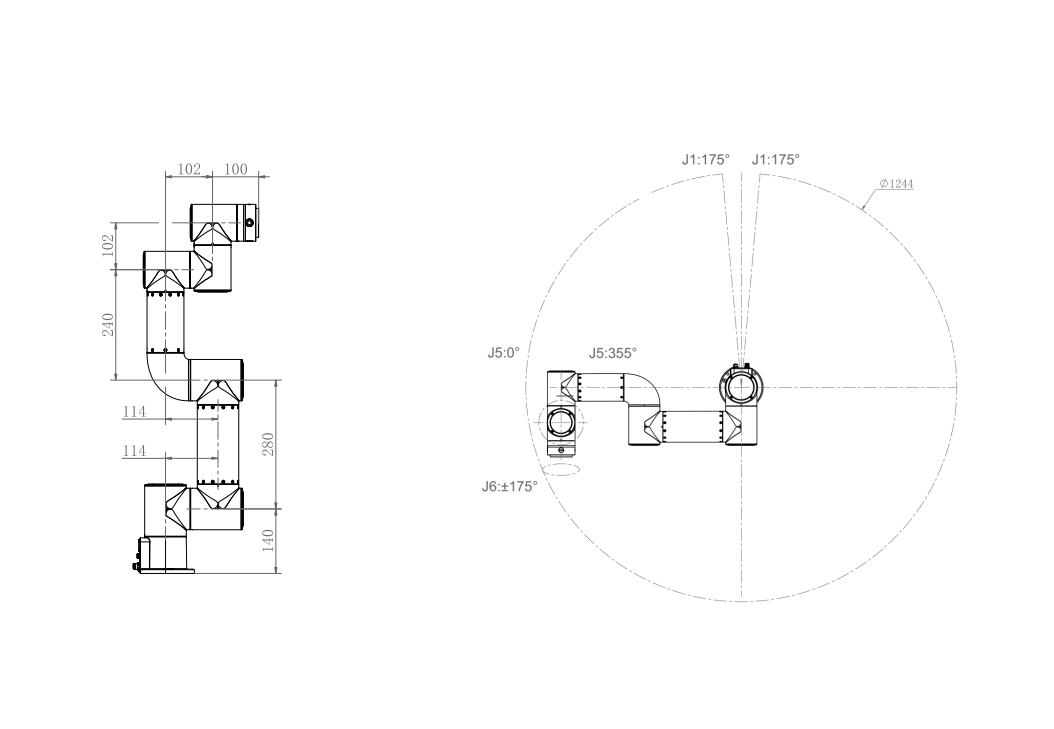
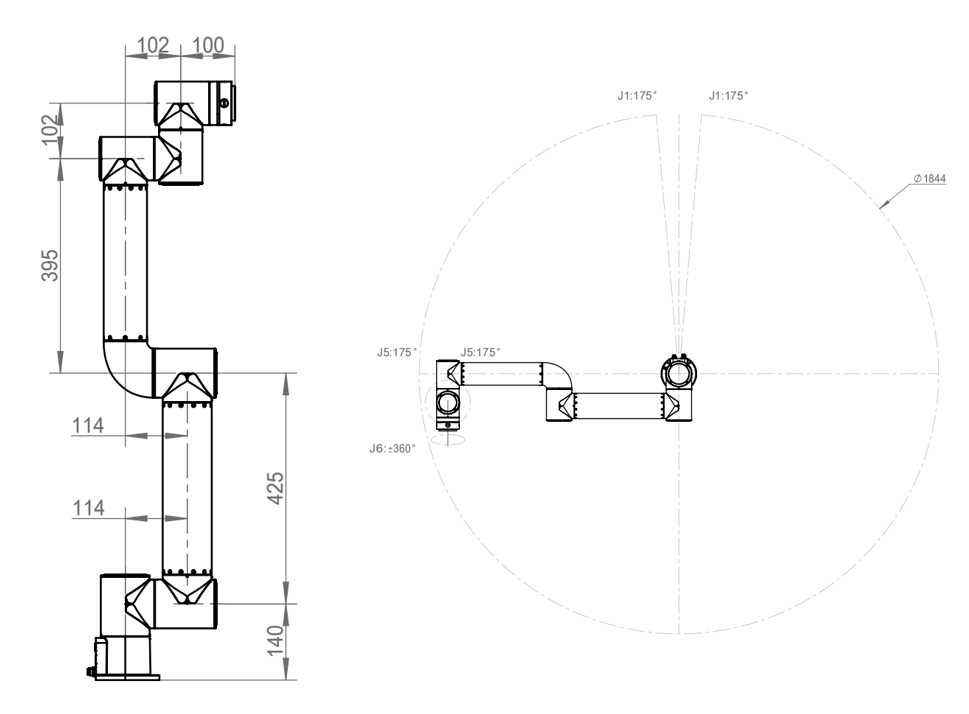
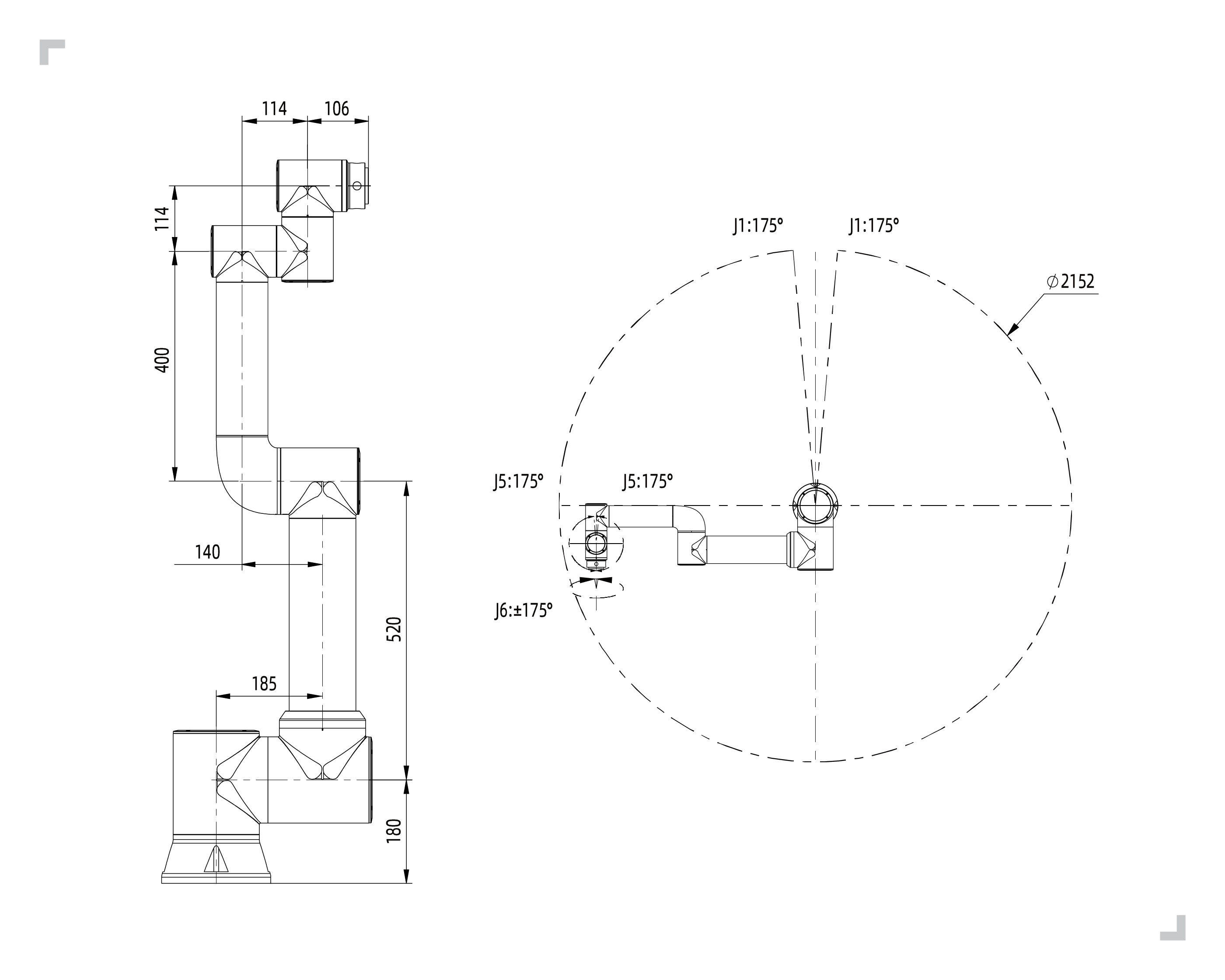
2.2. Zakres ruchu
Przestrzeń montażowa ramienia mechanicznego:
Montaż korpusu robota wymaga przestrzeni 3m × 3m × 2m (długość × szerokość × wysokość), aby umożliwić ruch robota przy maksymalnym zasięgu ramienia. Jeśli użytkownik samodzielnie dodaje obciążenie końcowe, należy upewnić się, że przestrzeń montażowa pozostawia co najmniej 500 mm luzu.
Informacja
Przestrzeń wysokości zależy od wysokości podstawy montażowej. Podane tutaj 2 m to odległość powyżej płaszczyzny odniesienia montażu.
Przestrzeń montażowa szafy sterowniczej:
Szafa sterownicza powinna być umieszczona w miejscu łatwo dostępnym, zabezpieczonym przed zalaniem i porażeniem prądem, w odległości 0,6 m - 1,5 m od podłogi.
Szafa musi znajdować się z dala od źródeł ciepła.
Po stronie kabla głównego szafy sterowniczej należy zapewnić brak przeszkód w promieniu 150 mm, a po pozostałych stronach w promieniu 100 mm, aby ułatwić rozpraszanie ciepła oraz dostęp.
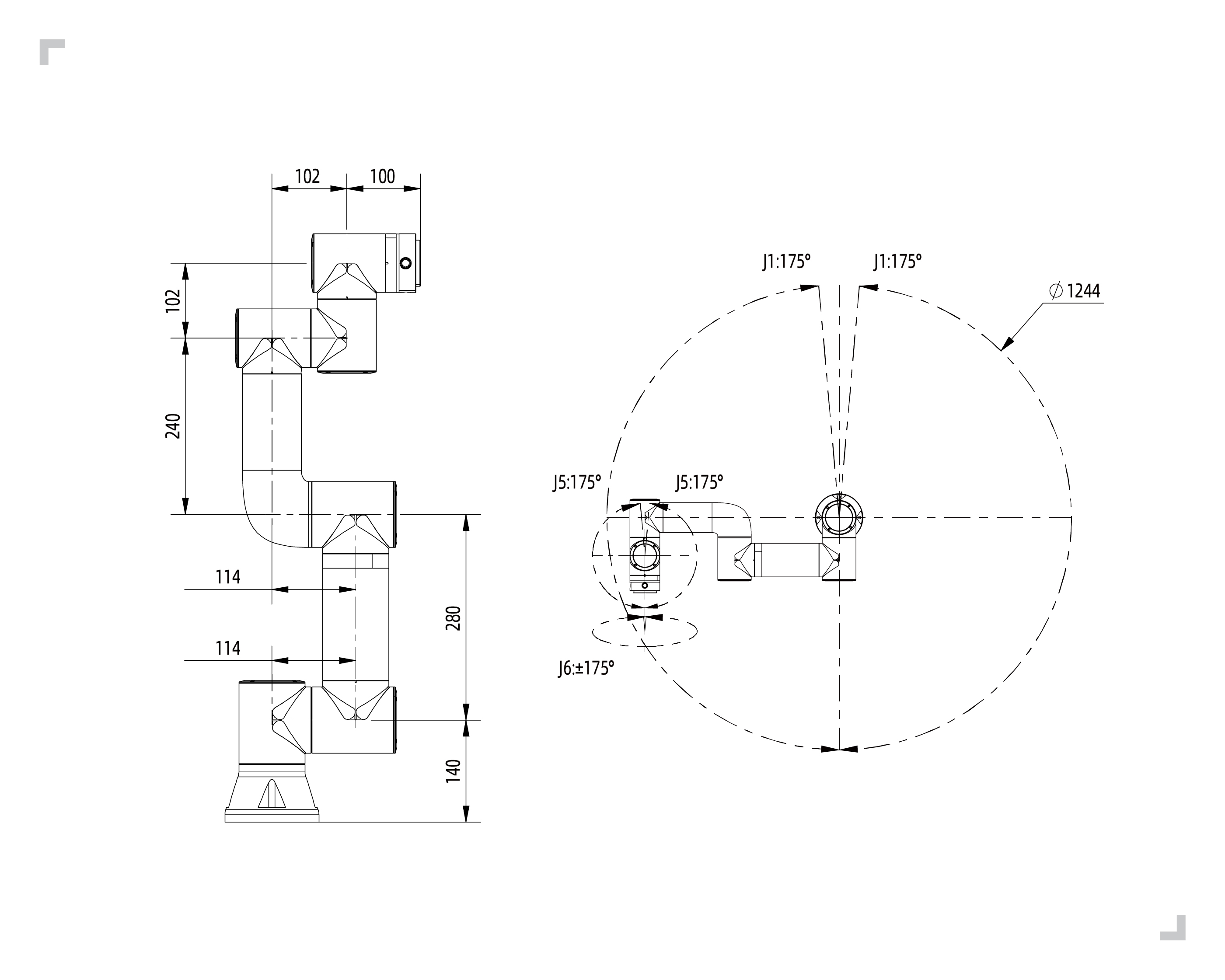
Wykres 2.2-1 Zakres ruchu robota współpracującego FR3
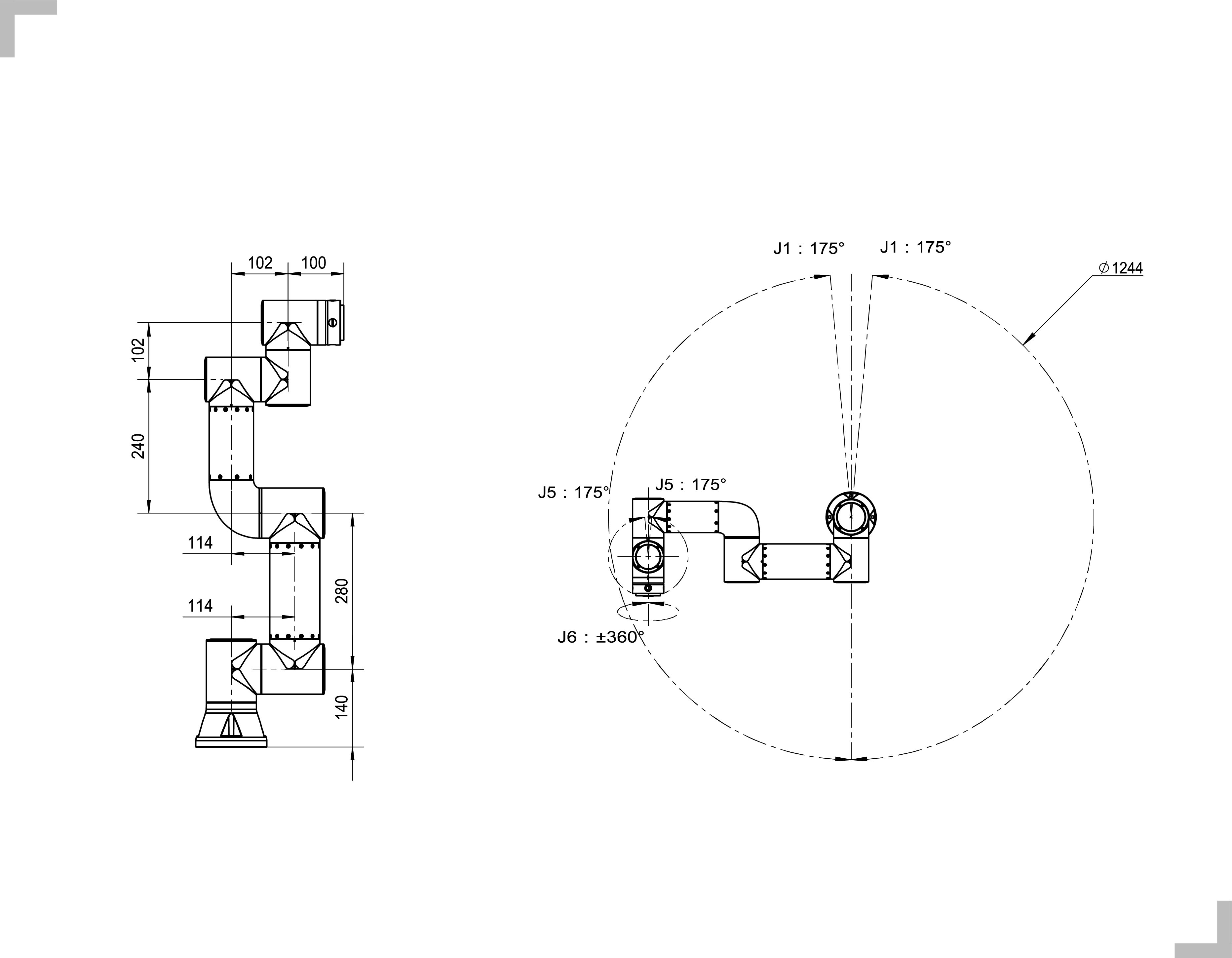
Wykres 2.2-2 Zakres ruchu robota współpracującego FR3-WML
Wykres 2.2-3 Zakres ruchu robota współpracującego FR3-WMS
Wykres 2.2-4 Zakres ruchu robota współpracującego FR3-C
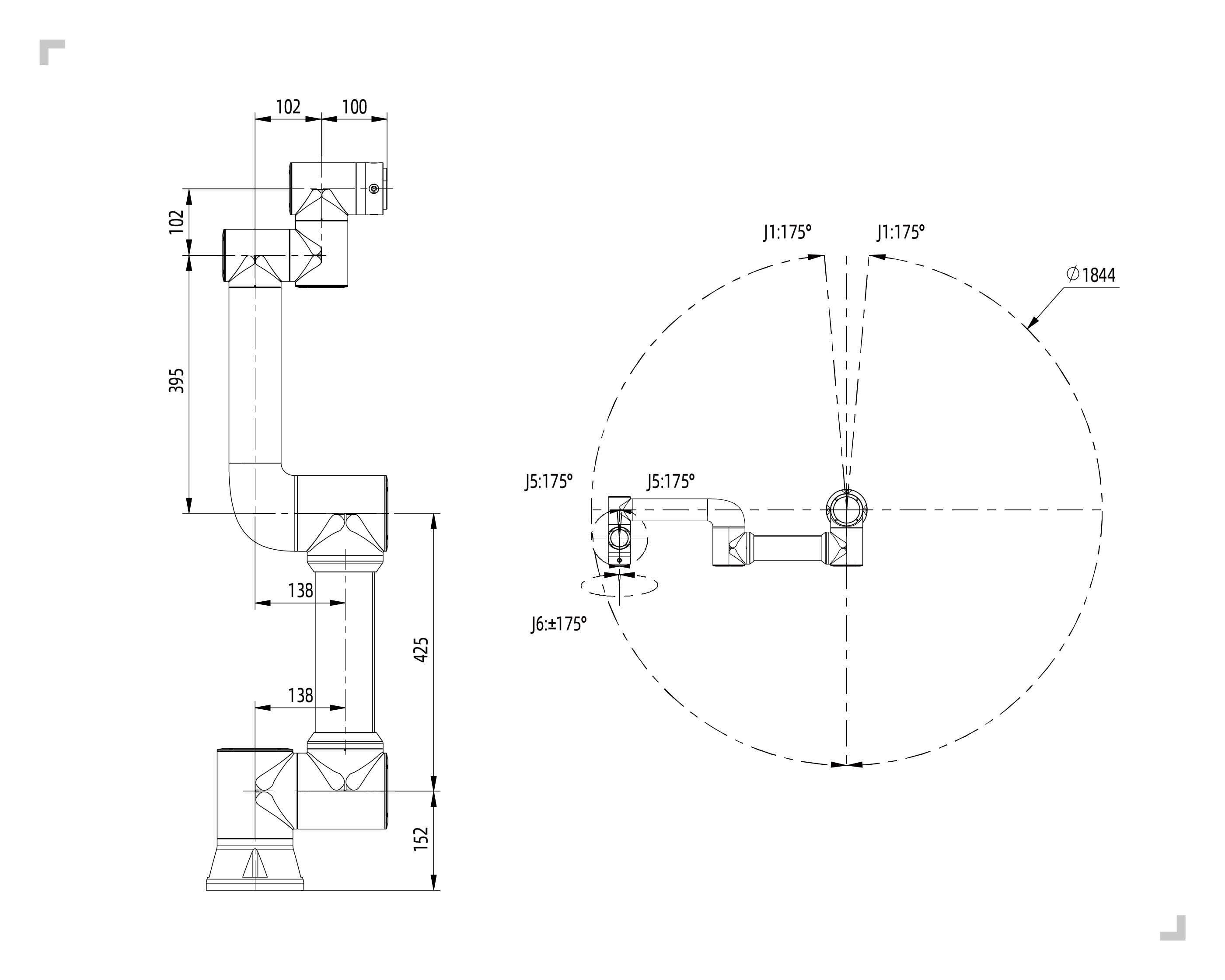
Wykres 2.2-5 Zakres ruchu robota współpracującego FR5
Wykres 2.2-6 Zakres ruchu robota współpracującego FR5-C
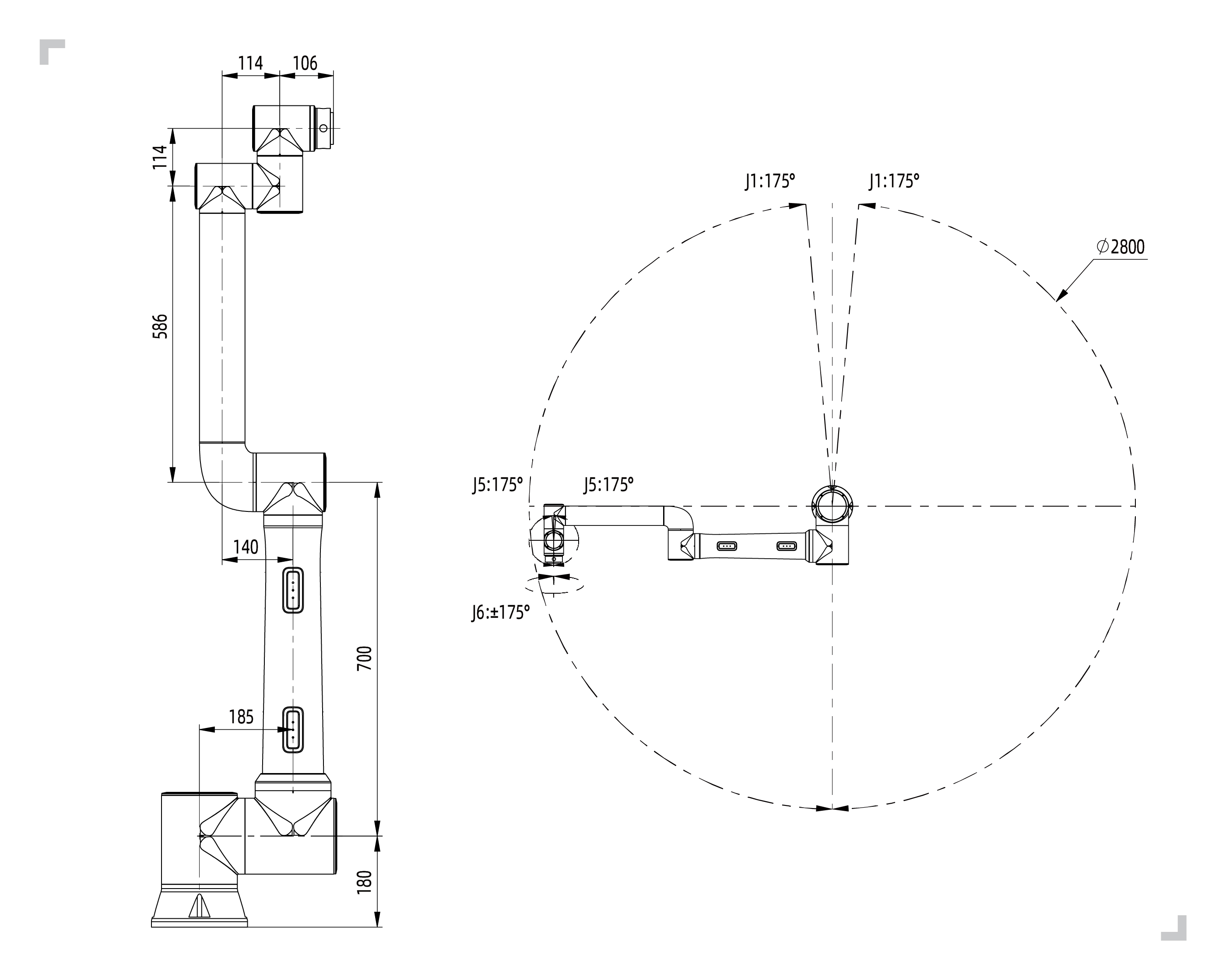
Wykres 2.2-7 Zakres ruchu robota współpracującego FR10
Wykres 2.2-8 Zakres ruchu robota współpracującego FR16
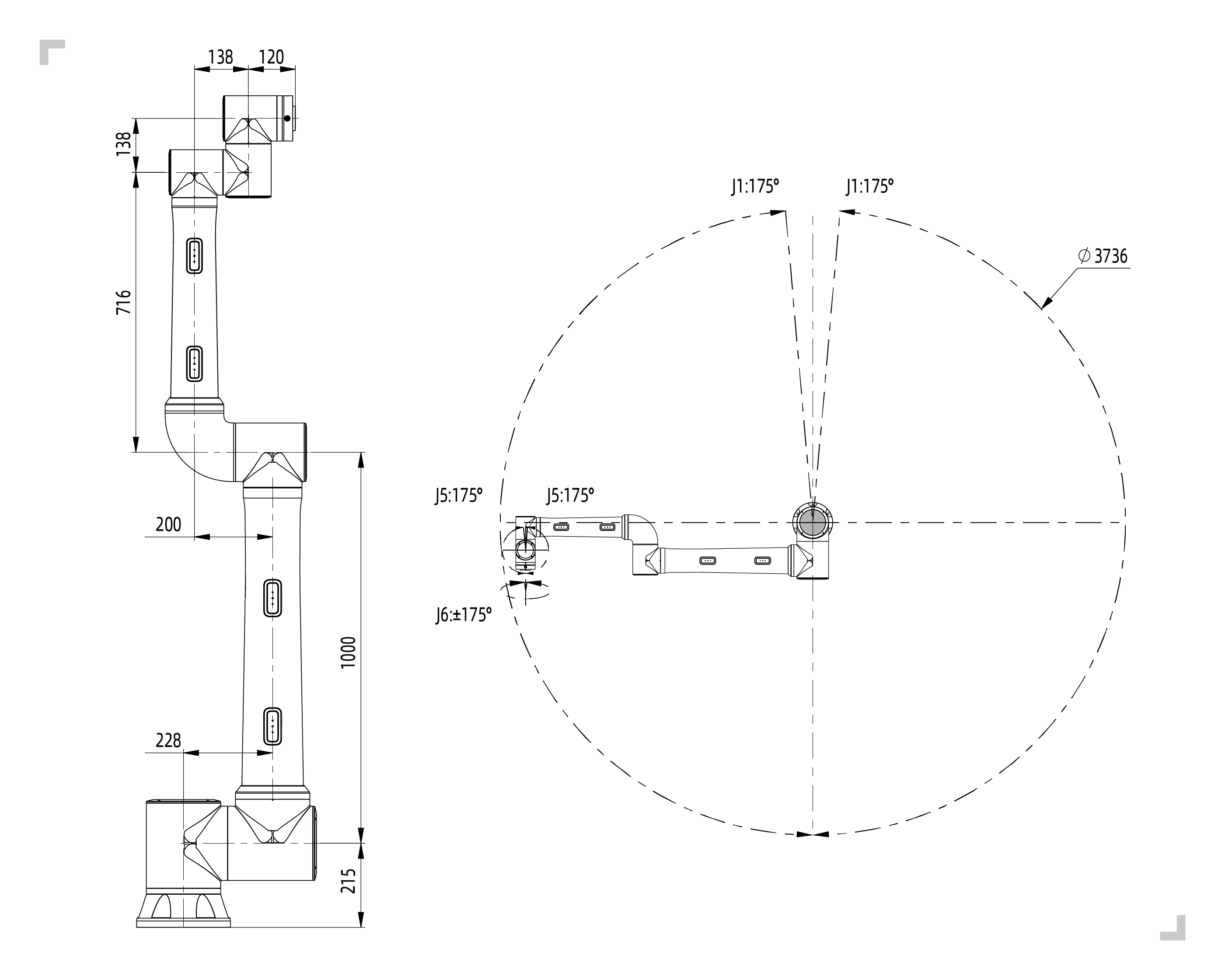
Wykres 2.2-9 Zakres ruchu robota współpracującego FR20
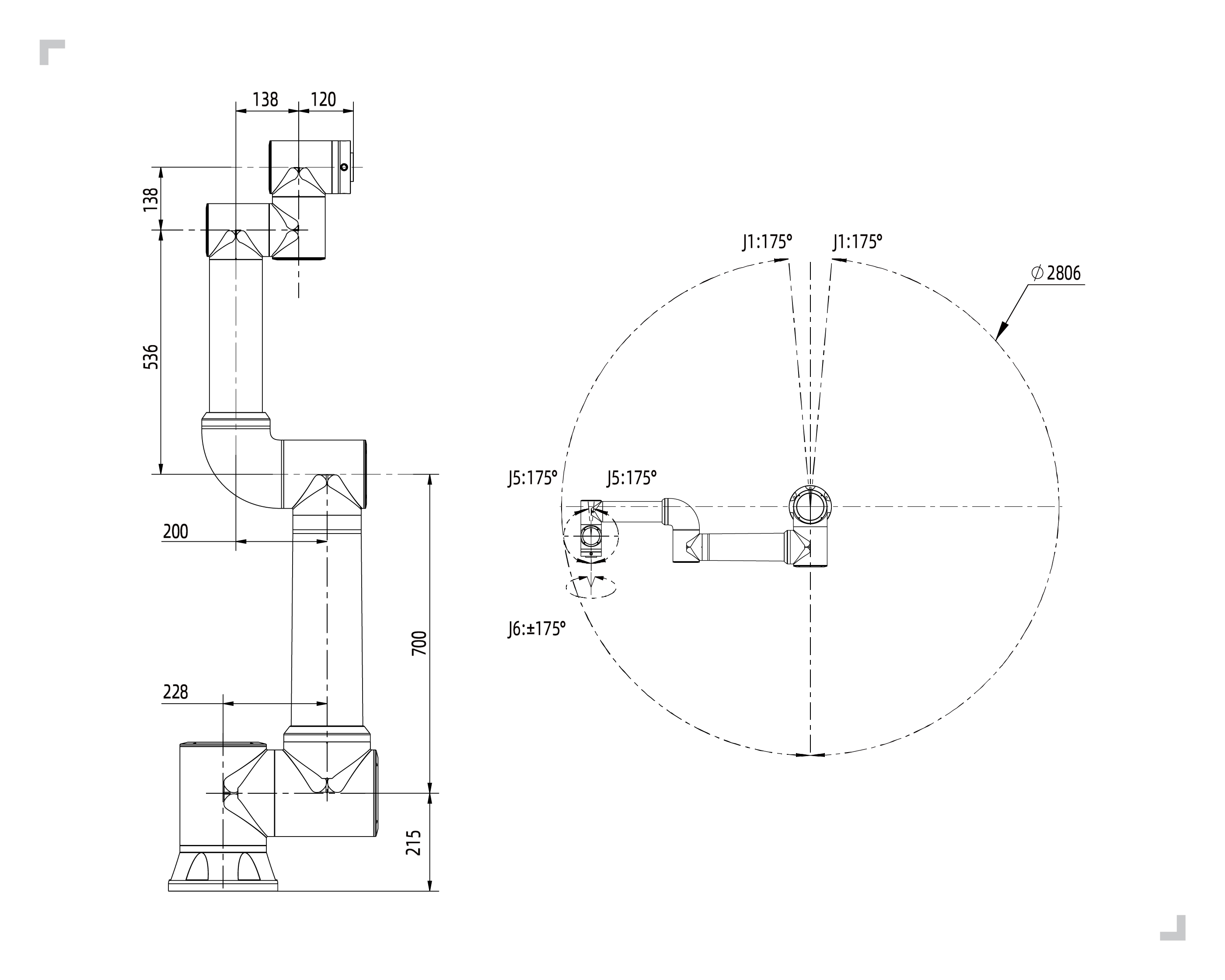
Wykres 2.2-10 Zakres ruchu robota współpracującego FR30
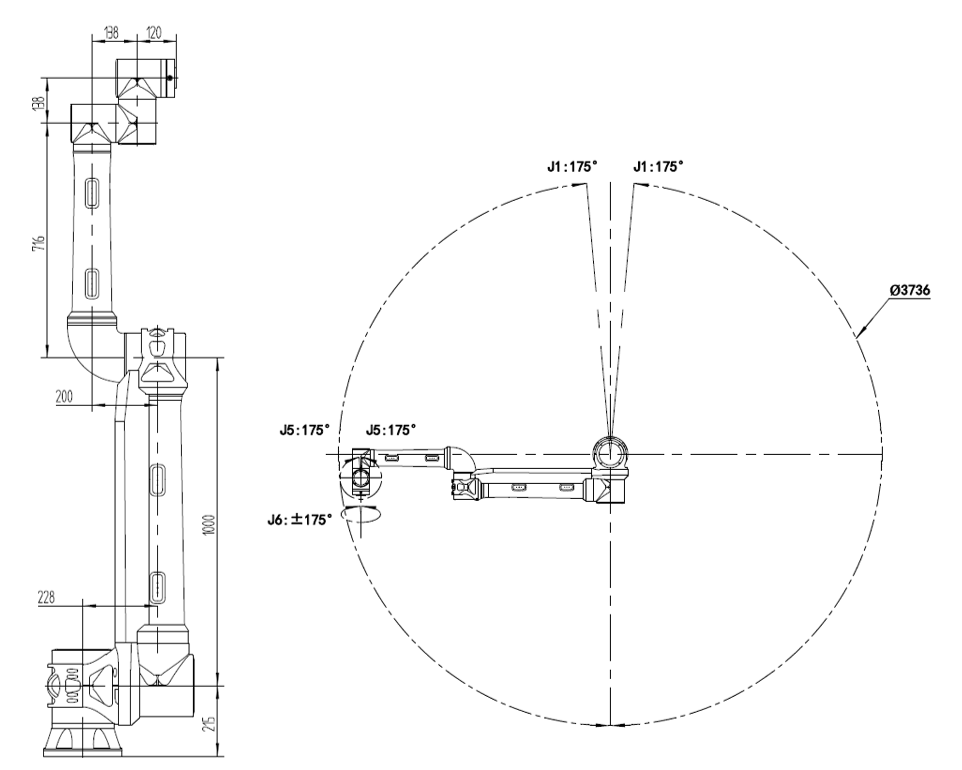
Wykres 2.2-11 Zakres ruchu robota współpracującego FR30L
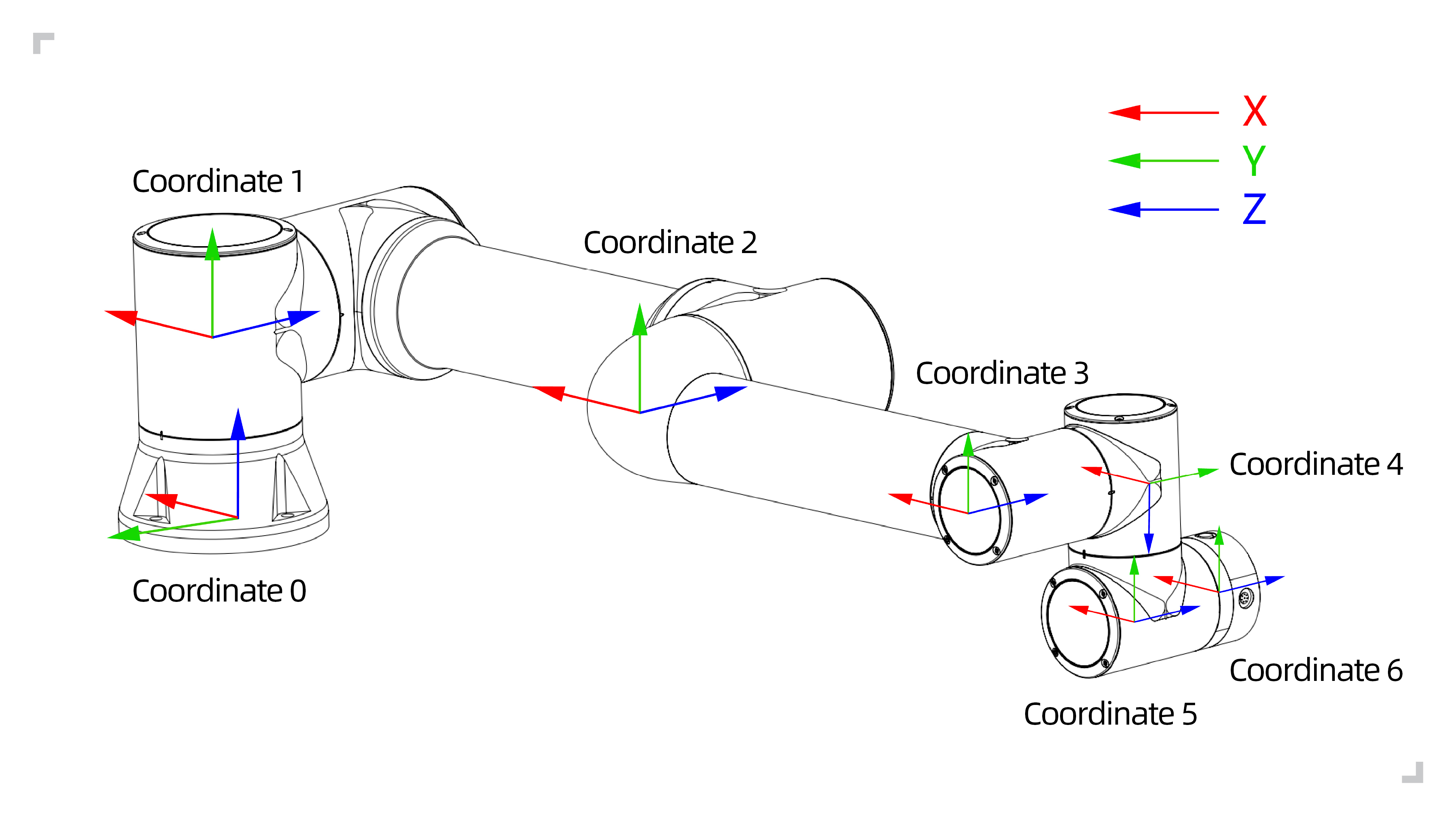
2.3. Układ współrzędnych robota
Wykres 2.3-1 Układ współrzędnych parametrów DH robota
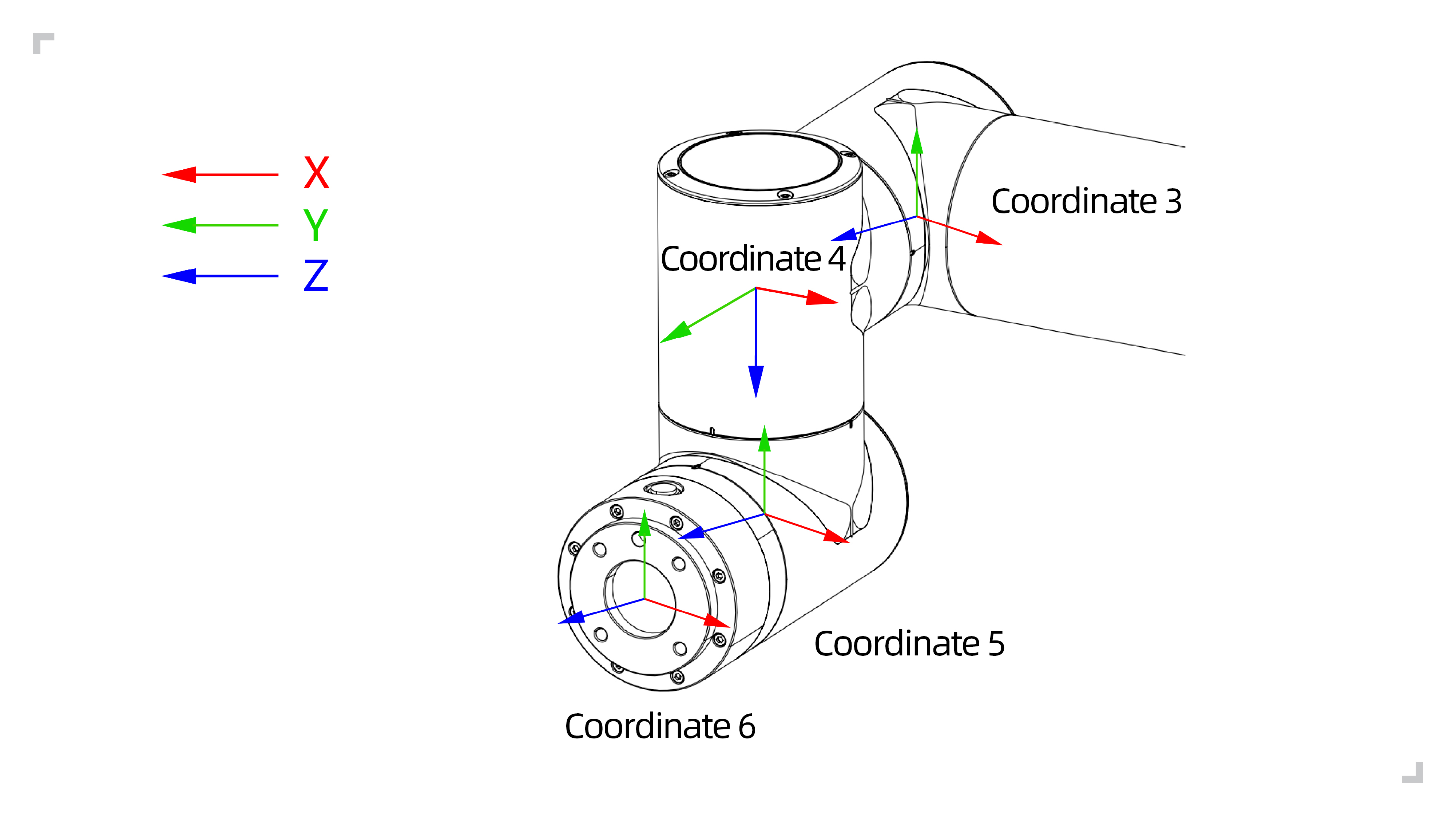
Wykres 2.3-2 Układ współrzędnych kołnierza końcowego robota
2.4. Parametry DH robota
Parametry DH są używane do obliczania kinematyki i dynamiki robotów współpracujących serii FR.
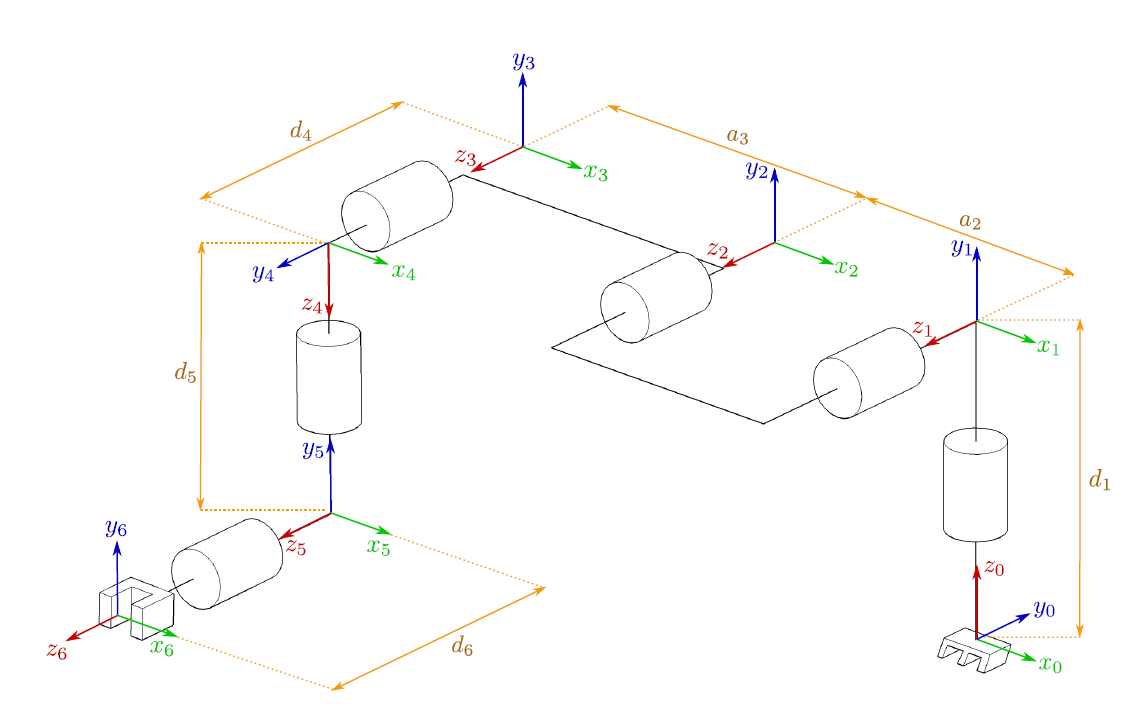
Wykres 2.4-1 Parametry DH robotów współpracujących serii FR
Parametry DH robotów współpracujących serii FR są przedstawione poniżej:
Tabela 2.4-1 Tabela parametrów DH robota współpracującego FR3
Kinematyka |
theta[rad] |
a[mm] |
d[mm] |
alpha[rad] |
Dynamika |
Masa[kg] |
Środek masy[mm] |
Joint1 |
0 |
0 |
140 |
π/2 |
Link1 |
1,98 |
[-0,05, -15,92, 2,26] |
Joint2 |
0 |
-280 |
0 |
0 |
Link2 |
3,4445 |
[139,49, 0, 99,54] |
Joint3 |
0 |
-240 |
0 |
0 |
Link3 |
1,437 |
[58,99, 0,08, 12,99] |
Joint4 |
0 |
0 |
102 |
π/2 |
Link4 |
0,871 |
[0,05, -2,33, 14,67] |
Joint5 |
0 |
0 |
102 |
-π/2 |
Link5 |
0,805 |
[-0,05, 2,33, 14,67] |
Joint6 |
0 |
0 |
100 |
0 |
Link6 |
0,261 |
[-0,05, -1,11, -20,05] |
Tabela 2.4-2 Tabela parametrów DH robota współpracującego FR3-WMS
Kinematyka |
theta[rad] |
a[mm] |
d[mm] |
alpha[rad] |
Dynamika |
Masa[kg] |
Środek masy[mm] |
Joint1 |
0 |
140 |
0 |
π/2 |
Link1 |
1,66 |
[-0,06, -13,58, 1,68] |
Joint2 |
0 |
0 |
-280 |
0 |
Link2 |
3,68 |
[140,11, 0, 101,71] |
Joint3 |
0 |
0 |
-240 |
0 |
Link3 |
1,81 |
[63,49, 0,1, 10,94] |
Joint4 |
0 |
102 |
0 |
π/2 |
Link4 |
1,18 |
[0,07, -2,18, 12,48] |
Joint5 |
0 |
102 |
0 |
-π/2 |
Link5 |
1,18 |
[-0,07, 2,18, 12,48] |
Joint6 |
0 |
100 |
0 |
0 |
Link6 |
0,28 |
[1,81, 1,33, -20,41] |
Tabela 2.4-3 Tabela parametrów DH robota współpracującego FR3-WML
Kinematyka |
theta[rad] |
a[mm] |
d[mm] |
alpha[rad] |
Dynamika |
Masa[kg] |
Środek masy[mm] |
Joint1 |
0 |
140 |
0 |
π/2 |
Link1 |
1,54 |
[-0,01, -14,27, 1,37] |
Joint2 |
0 |
0 |
-425 |
0 |
Link2 |
3,49 |
[212,5, 0, 101,43] |
Joint3 |
0 |
0 |
-395 |
0 |
Link3 |
2 |
[114,17, 0,08, 9,92] |
Joint4 |
0 |
102 |
0 |
π/2 |
Link4 |
1,17 |
[0,07, -2,18, 12,48] |
Joint5 |
0 |
102 |
0 |
-π/2 |
Link5 |
1,17 |
[-0,07, 2,18, 12,48] |
Joint6 |
0 |
100 |
0 |
0 |
Link6 |
0,28 |
[1,9, 1,6, -20,08] |
Tabela 2.4-4 Tabela parametrów DH robota współpracującego FR3-C
Kinematyka |
theta[rad] |
a[mm] |
d[mm] |
alpha[rad] |
Dynamika |
Masa[kg] |
Środek masy[mm] |
Joint1 |
0 |
140 |
0 |
π/2 |
Link1 |
1,69 |
[-0,16, -13,99, 1,53] |
Joint2 |
0 |
0 |
-280 |
0 |
Link2 |
3,73 |
[140, 0, 101,34] |
Joint3 |
0 |
0 |
-240 |
0 |
Link3 |
1,84 |
[63,24, 0,08, 11,04] |
Joint4 |
0 |
102 |
0 |
π/2 |
Link4 |
1,2 |
[0,1, -2,03, 12,55] |
Joint5 |
0 |
102 |
0 |
-π/2 |
Link5 |
1,2 |
[-0,1, 2,03, 12,55] |
Joint6 |
0 |
100 |
0 |
0 |
Link6 |
0,53 |
[1,48, 1,54, -17,9] |
Tabela 2.4-5 Tabela parametrów DH robota współpracującego FR5
Kinematyka |
theta[rad] |
a[mm] |
d[mm] |
alpha[rad] |
Dynamika |
Masa[kg] |
Środek masy[mm] |
Joint1 |
0 |
0 |
152 |
π/2 |
Link1 |
4,64 |
[-0,19, -18,28, 2,26] |
Joint2 |
0 |
-425 |
0 |
0 |
Link2 |
10,08 |
[212,47, 0, 121,2] |
Joint3 |
0 |
-395 |
0 |
0 |
Link3 |
2,71 |
[122,62, 0,17, 12,59] |
Joint4 |
0 |
0 |
102 |
π/2 |
Link4 |
1,56 |
[0,05, -2,33, 14,68] |
Joint5 |
0 |
0 |
102 |
-π/2 |
Link5 |
1,56 |
[-0,05, 2,33, 14,68] |
Joint6 |
0 |
0 |
100 |
0 |
Link6 |
0,36 |
[0,93, 0,81, -20,05] |
Tabela 2.4-6 Tabela parametrów DH robota współpracującego FR5-C
Kinematyka |
theta[rad] |
a[mm] |
d[mm] |
alpha[rad] |
Dynamika |
Masa[kg] |
Środek masy[mm] |
Joint1 |
0 |
0 |
140 |
π/2 |
Link1 |
1,76 |
[-0,09, -15,66, 1,53] |
Joint2 |
0 |
-280 |
0 |
0 |
Link2 |
3,98 |
[211,32, 0, 101,13] |
Joint3 |
0 |
-240 |
0 |
0 |
Link3 |
2,08 |
[102,62, 0,12, 11,26] |
Joint4 |
0 |
0 |
102 |
π/2 |
Link4 |
1,33 |
[0,09, -1,86, 13,76] |
Joint5 |
0 |
0 |
102 |
-π/2 |
Link5 |
1,33 |
[-0,09, 1,86, 13,76] |
Joint6 |
0 |
0 |
100 |
0 |
Link6 |
0,28 |
[-0,26, 1,75, -20,50] |
Tabela 2.4-7 Tabela parametrów DH robota współpracującego FR5-WML
Kinematyka |
theta[rad] |
a[mm] |
d[mm] |
alpha[rad] |
Dynamika |
Masa[kg] |
Środek masy[mm] |
Joint1 |
0 |
180 |
0 |
π/2 |
Link1 |
11,49 |
[-0,16, -28,51, 4,16] |
Joint2 |
0 |
0 |
-970 |
0 |
Link2 |
21,3 |
[642,59, 0,04, 165,62] |
Joint3 |
0 |
0 |
-816 |
0 |
Link3 |
4,61 |
[321,39, 0,16, 52,76] |
Joint4 |
0 |
159 |
0 |
π/2 |
Link4 |
1,66 |
[0,21, -3,06, 13,07] |
Joint5 |
0 |
114 |
0 |
-π/2 |
Link5 |
1,66 |
[-0,21, 3,06, 13,07] |
Joint6 |
0 |
160 |
0 |
0 |
Link6 |
0,36 |
[1,45, 1,09, -19,98] |
Tabela 2.4-8 Tabela parametrów DH robota współpracującego FR10
Kinematyka |
theta[rad] |
a[mm] |
d[mm] |
alpha[rad] |
Dynamika |
Masa[kg] |
Środek masy[mm] |
Joint1 |
0 |
0 |
180 |
π/2 |
Link1 |
11,97 |
[-0,10, -26,12, 4,04] |
Joint2 |
0 |
-700 |
0 |
0 |
Link2 |
19,59 |
[480,27, 0,01, 164,68] |
Joint3 |
0 |
-586 |
0 |
0 |
Link3 |
3,7 |
[211,22, 0,11, 54,21] |
Joint4 |
0 |
0 |
159 |
π/2 |
Link4 |
1,69 |
[0,12, -3, 12,18] |
Joint5 |
0 |
0 |
114 |
-π/2 |
Link5 |
1,69 |
[-0,12, 3, 12,18] |
Joint6 |
0 |
0 |
106 |
0 |
Link6 |
0,35 |
[1,24, 0,85, -20,34] |
Tabela 2.4-9 Tabela parametrów DH robota współpracującego FR16
Kinematyka |
theta[rad] |
a[mm] |
d[mm] |
alpha[rad] |
Dynamika |
Masa[kg] |
Środek masy[mm] |
Joint1 |
0 |
0 |
180 |
π/2 |
Link1 |
11,97 |
[-0,10, -26,12, 4,04] |
Joint2 |
0 |
-520 |
0 |
0 |
Link2 |
18,18 |
[364,4, 0,01, 163,09] |
Joint3 |
0 |
-400 |
0 |
0 |
Link3 |
3,22 |
[135,03, 0,12, 55,58] |
Joint4 |
0 |
0 |
159 |
π/2 |
Link4 |
1,69 |
[0,12, -3, 12,18] |
Joint5 |
0 |
0 |
114 |
-π/2 |
Link5 |
1,69 |
[-0,12, 3, 12,18] |
Joint6 |
0 |
0 |
106 |
0 |
Link6 |
0,35 |
[1,24, 0,85, -20,34] |
Tabela 2.4-10 Tabela parametrów DH robota współpracującego FR20
Kinematyka |
theta[rad] |
a[mm] |
d[mm] |
alpha[rad] |
Dynamika |
Masa[kg] |
Środek masy[mm] |
Joint1 |
0 |
0 |
215 |
π/2 |
Link1 |
20,79 |
[-0,19, -36,57, 5,68] |
Joint2 |
0 |
-1000 |
0 |
0 |
Link2 |
42,84 |
[605,25, 0,06, 202,94] |
Joint3 |
0 |
-716 |
0 |
0 |
Link3 |
9,88 |
[262,84, 0,22, 43,08] |
Joint4 |
0 |
0 |
166 |
π/2 |
Link4 |
4,64 |
[0,23, -2,28, 18,42] |
Joint5 |
0 |
0 |
138 |
-π/2 |
Link5 |
4,64 |
[-0,23, 2,28, 18,42] |
Joint6 |
0 |
0 |
120 |
0 |
Link6 |
0,6 |
[-2,11, -1,96, -20,38] |
Tabela 2.4-11 Tabela parametrów DH robota współpracującego FR30
Kinematyka |
theta[rad] |
a[mm] |
d[mm] |
alpha[rad] |
Dynamika |
Masa[kg] |
Środek masy[mm] |
Joint1 |
0 |
0 |
215 |
π/2 |
Link1 |
20,64 |
[-0,22, -37,39, 5,59] |
Joint2 |
0 |
-700 |
0 |
0 |
Link2 |
36,37 |
[440,73, 0,05, 198,7] |
Joint3 |
0 |
-536 |
0 |
0 |
Link3 |
8,41 |
[185,64, 0,25, 45,82] |
Joint4 |
0 |
0 |
166 |
π/2 |
Link4 |
4,64 |
[0,23, -2,29, 18,60] |
Joint5 |
0 |
0 |
138 |
-π/2 |
Link5 |
4,64 |
[-0,23, 2,29, 18,60] |
Joint6 |
0 |
0 |
120 |
0 |
Link6 |
0,6 |
[-2,11, -1,96, -20,38] |
Tabela 2.4-12 Tabela parametrów DH robota współpracującego FR30L
Kinematyka |
theta[rad] |
a[mm] |
d[mm] |
alpha[rad] |
Dynamika |
Masa[kg] |
Środek masy[mm] |
Joint1 |
0 |
0 |
215 |
π/2 |
Link1 |
27,85 |
[-0,18, -26,29, 14,57] |
Joint2 |
0 |
-1000 |
0 |
0 |
Link2 |
50,43 |
[580,62, 0,04, 223,34] |
Joint3 |
0 |
-716 |
0 |
0 |
Link3 |
9,88 |
[262,84, 0,22, 43,08] |
Joint4 |
0 |
0 |
166 |
π/2 |
Link4 |
4,64 |
[0,23, -2,28, 18,42] |
Joint5 |
0 |
0 |
138 |
-π/2 |
Link5 |
4,64 |
[-0,23, 2,28, 18,42] |
Joint6 |
0 |
0 |
120 |
0 |
Link6 |
0,6 |
[-2,11, -1,96, -20,38] |