19. Tryb węzła podrzędnego robota
19.1. Przegląd
W celu ułatwienia sterowania ruchem robota przez PLC za pomocą różnych protokołów magistrali przemysłowych (CC-Link, Profinet, Ethernet/IP, EtherCAT), w zintegrowanej mini skrzynce kontrolnej dodano karty FRJ-PCIeN-EIP/CC/PN-RJ-V10 oraz FRJ-PCIeN-EC/PN/EIP/CC-RJ-V20, opracowując tryb węzła podrzędnego robota, realizujący następujące funkcje:
Urządzenie master wysyła sygnały wejściowe do węzła podrzędnego robota, co pozwala sterować robotem w celu wykonania odpowiednich działań, np.: sterowanie wyjściem DO skrzynki kontrolnej robota, sterowanie ruchem robota itp.;
Urządzenie master odczytuje wartości pod odpowiednimi adresami, aby uzyskać odpowiednie dane stanu robota w czasie rzeczywistym, np.: dane przegubów robota, pozycję TCP, informację, czy robot zakończył ruch itp.
19.2. Konfiguracja środowiska
Opis modeli kart i wersji oprogramowania:
Typ protokołu |
Model karty |
Wersja oprogramowania robota |
|---|---|---|
CC-Link IEF Basic |
Karta FRJ-PCIeN-EIP/CC/PN-RJ-V10 |
V3.8.4 i nowsze |
CC-Link IEF Basic |
Karta FRJ-PCIeN-EC/PN/EIP/CC-RJ-V20 |
V3.9.6 i nowsze |
Profinet |
Karta FRJ-PCIeN-EIP/CC/PN-RJ-V10 |
V3.8.4 i nowsze |
Profinet |
Karta FRJ-PCIeN-EC/PN/EIP/CC-RJ-V20 |
V3.9.6 i nowsze |
Ethernet/IP |
Karta FRJ-PCIeN-EIP/CC/PN-RJ-V10 |
V3.8.4 i nowsze |
Ethernet/IP |
Karta FRJ-PCIeN-EC/PN/EIP/CC-RJ-V20 |
V3.9.6 i nowsze |
EtherCAT |
Karta FRJ-PCIeN-EC/PN/EIP/CC-RJ-V20 |
V3.9.6 i nowsze |
19.2.1. Instalacja karty
Sprawdzenie materiałów: Karta FRJ-PCIeN oraz towarzyszące elementy blacharskie wyglądają następująco.

Schemat 19.2-1 Blacha montażowa (przód)

Schemat 19.2-2 Blacha montażowa (tył)
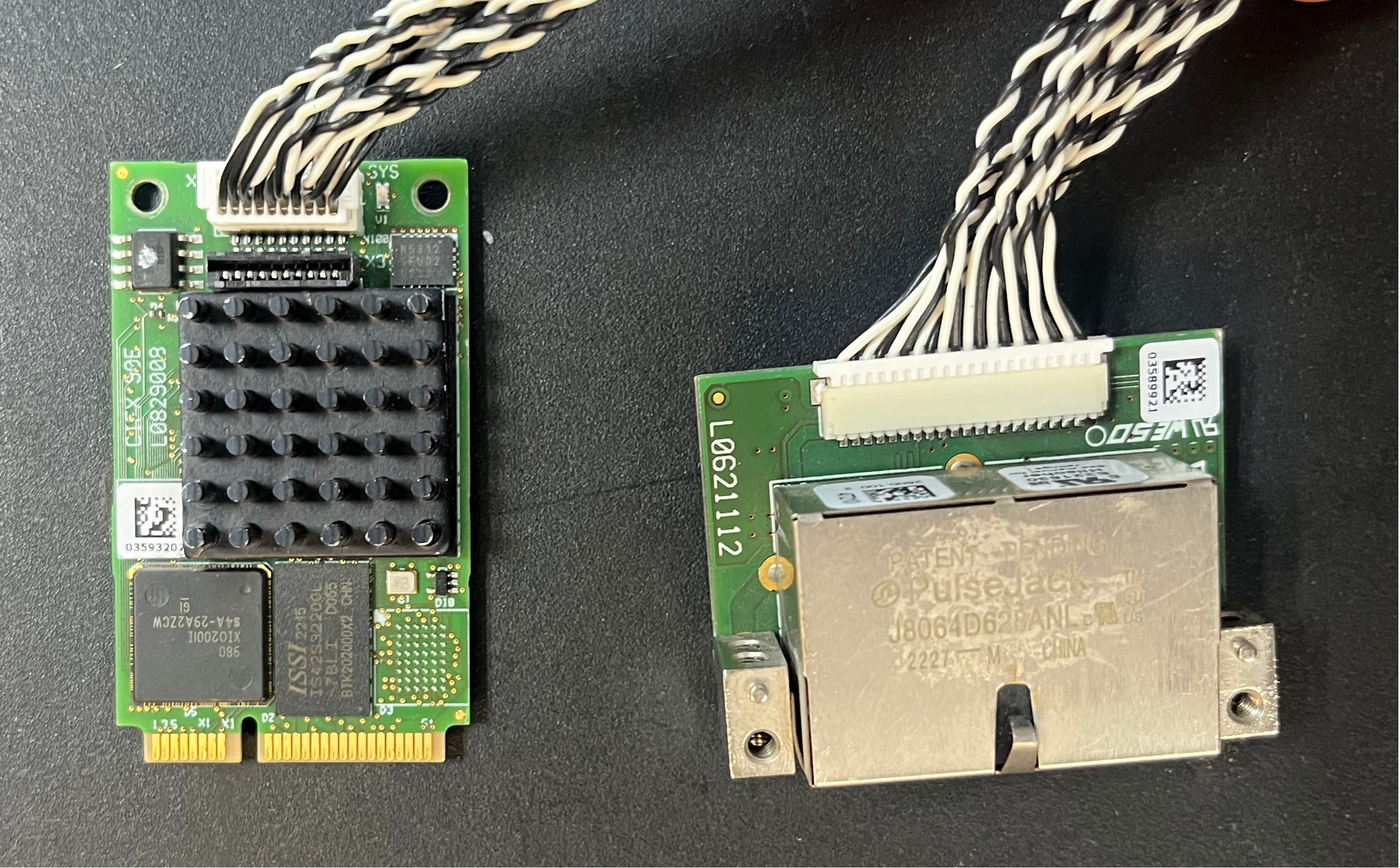
Schemat 19.2-3 Karta FRH-PCIeN-EC/EIP/CC/PN-RJ-V10

Schemat 19.2-4 Karta FRJ-PCIeN-EIP/CC/PN-RJ-V10
Montaż karty w zintegrowanej mini skrzynce kontrolnej, jak pokazano na rysunku.

Schemat 19.2-5 Schemat montażu blachy
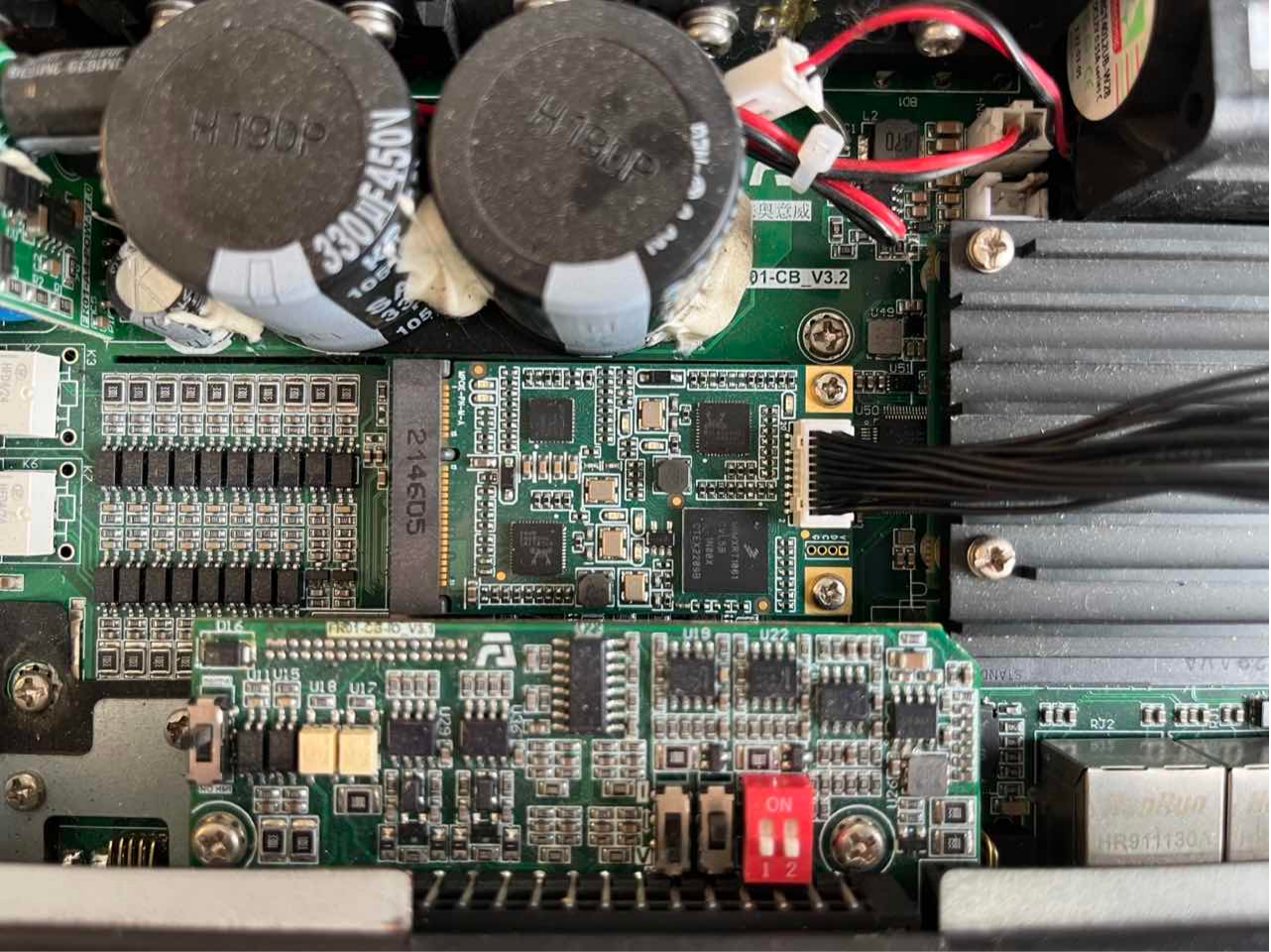
Schemat 19.2-6 Schemat montażu płyty głównej

Schemat 19.2-7 Schemat montażu karty rozszerzenia portu sieciowego RJ45
Informacja
Uwaga: Wszystkie śruby należy dokręcić.
Podłączenie skrzynki kontrolnej robota i PLC pokazano na poniższym rysunku.

Schemat 19.2-8 Schemat podłączenia skrzynki kontrolnej i PLC Mitsubishi

Schemat 19.2-9 Schemat podłączenia skrzynki kontrolnej i PLC Siemens

Schemat 19.2-10 Schemat podłączenia skrzynki kontrolnej i PLC Inovance

Schemat 19.2-11 Schemat podłączenia skrzynki kontrolnej i PLC Inovance
Informacja
1: Skrzynka kontrolna robota (port sieciowy karty); 2: Przełącznik; 3: Laptop PC; 4: PLC Mitsubishi (port sieciowy CC-Link IEF Basic); 5: PLC Siemens (port sieciowy Profinet); 6: PLC Inovance (Ethernet/IP); 7: PLC Inovance (port sieciowy EtherCAT);
19.2.2. Konfiguracja środowiska PLC
Środowisko testowe zbudowane do realizacji instrukcji węzła podrzędnego dla poszczególnych protokołów przedstawiono w poniższej tabeli, w tym modele PLC używane w poszczególnych protokołach, wersje firmware i oprogramowanie testowe.
Tabela 2-1 Środowisko testowe
Protokół |
Profinet |
CC-link |
|---|---|---|
Marka |
Siemens |
Mitsubishi |
Model |
CPU 1515-2 PN |
FX5S-30TR/DS |
Firmware |
6ES75152AM020AB0 |
30MR/ES V1.3 |
Oprogramowanie |
TIA Portal V17 |
GXWorks3V1.097B |
Adres IP karty |
IP konfigurowalny |
IP konfigurowalny |
Adres IP PLC |
IP nie musi być w tej samej podsieci |
IP w tej samej podsieci |
Protokół |
Ethernet/IP |
EtherCAT |
|---|---|---|
Marka |
Inovance |
Inovance |
Model |
Easy521-0808TN |
Easy521-0808TN |
Firmware |
/ |
/ |
Oprogramowanie |
AutoShop 4.11.0.1 |
AutoShop 4.11.0.1 |
Adres IP karty |
IP konfigurowalny |
IP konfigurowalny |
Adres IP PLC |
IP w tej samej podsieci |
IP w tej samej podsieci |
19.2.2.1. Ethernet/IP Inovance
Import pliku EDS
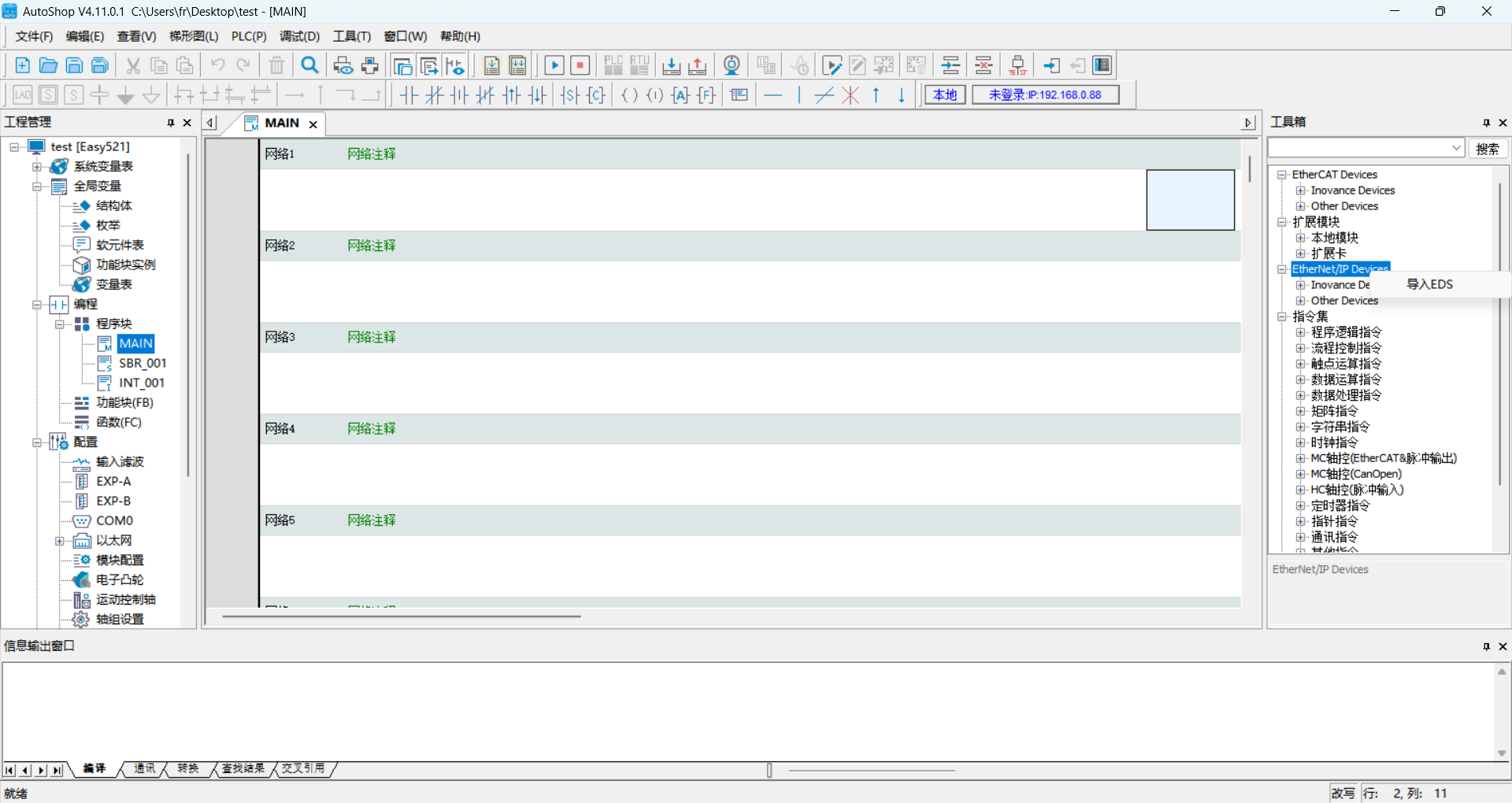
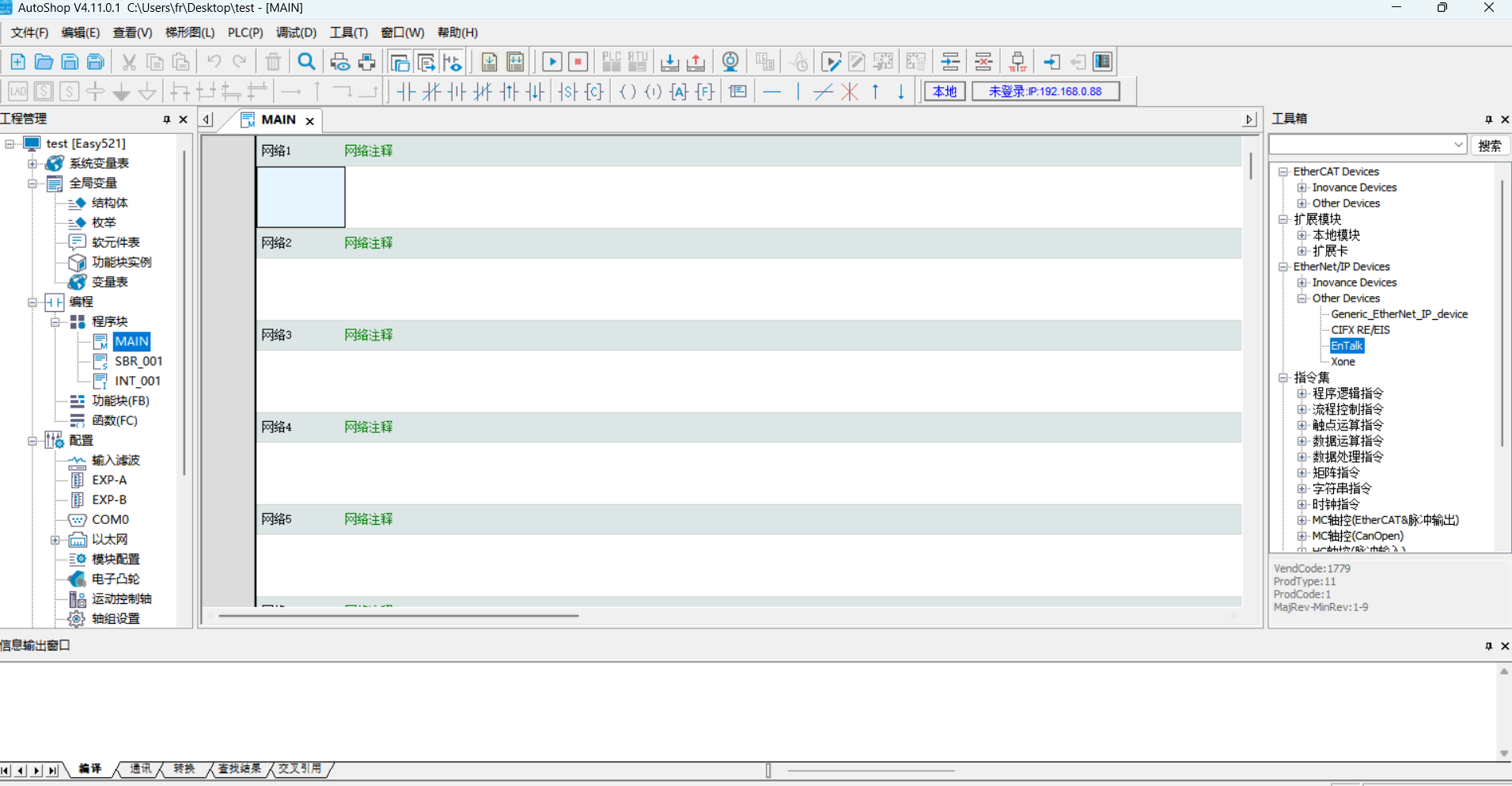
Otwórz oprogramowanie programistyczne Inovance AutoShop, utwórz nowy projekt PLC, w panelu narzędzi po prawej stronie wybierz „EtherNet/IP Devices”.
Kliknij lewym przyciskiem myszy na „EtherNet/IP”, następnie kliknij prawym przyciskiem, aby wywołać okno dialogowe „Importuj EDS”, potwierdź lewym przyciskiem i znajdź folder z plikiem EDS karty. Po pomyślnym imporcie nazwa karty pojawi się w katalogu „EtherNet/IP Devices”. Zamknij projekt i otwórz go ponownie, proces importu pliku EDS został zakończony.
Ustawienia parametrów EtherNet/IP
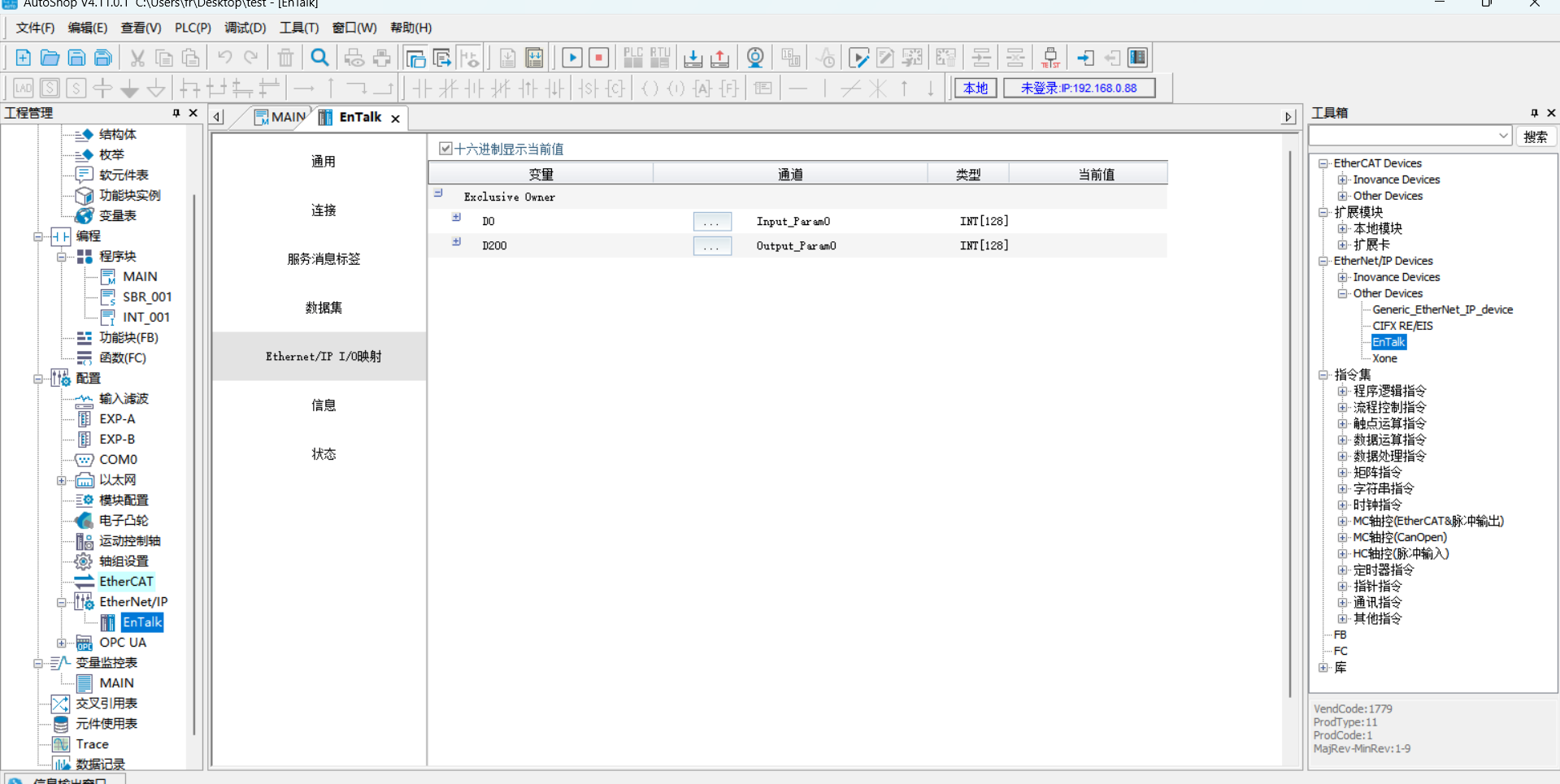
Kliknij dwukrotnie węzeł podrzędny w sekcji „EtherNet/IP” na lewym pasku narzędzi, pojawi się okno ustawień parametrów:
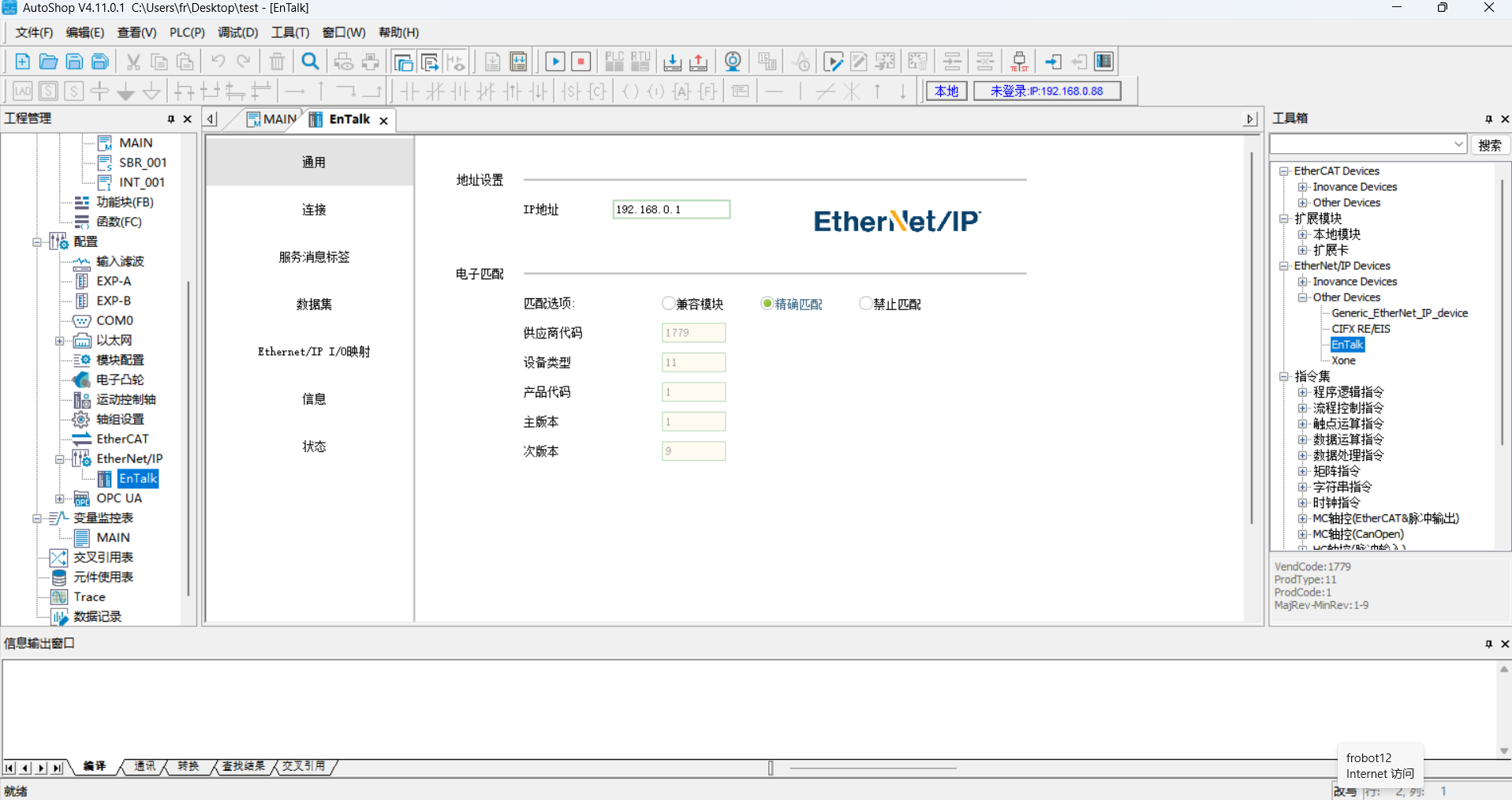
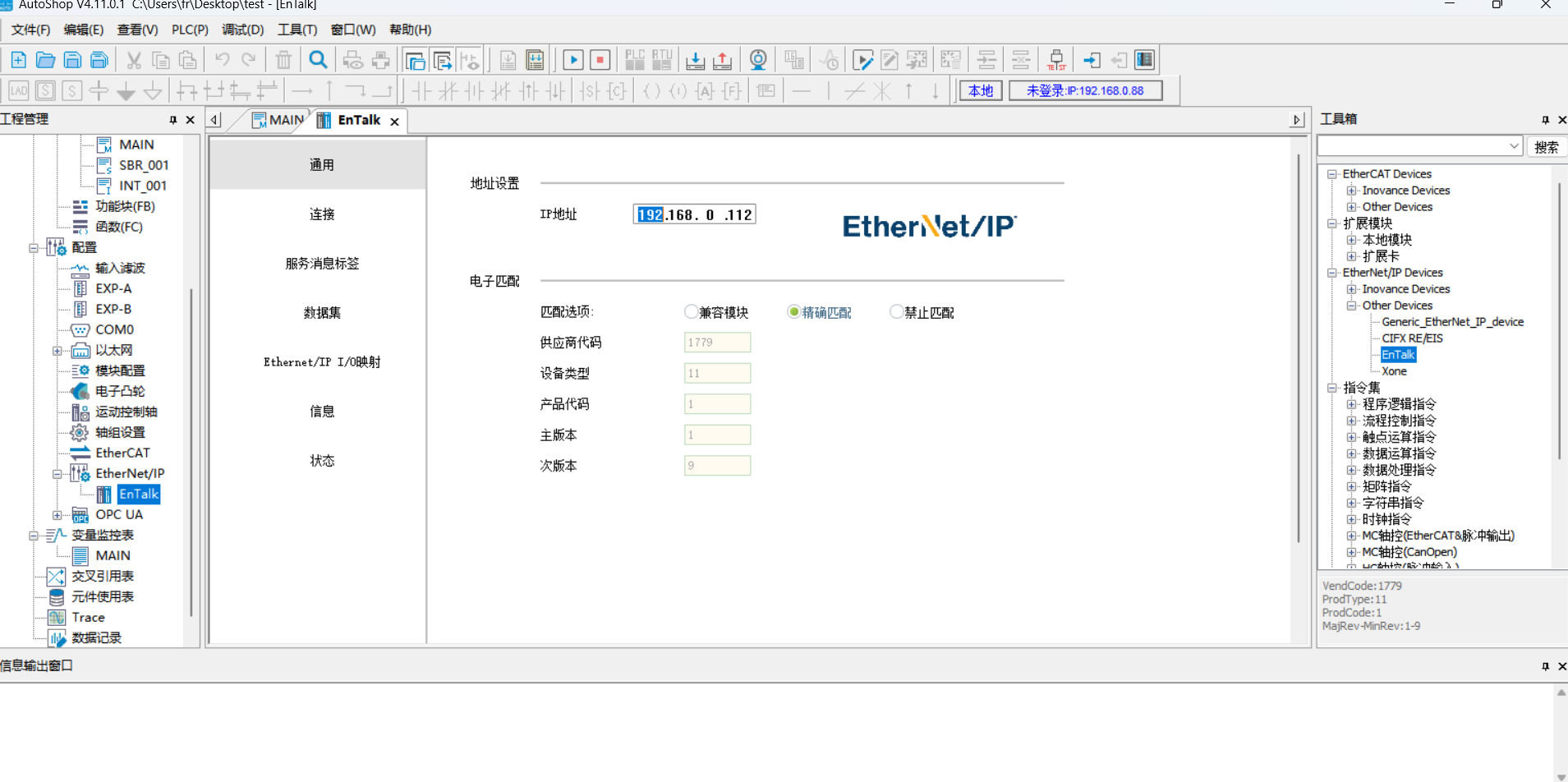
Wprowadź adres IP karty:
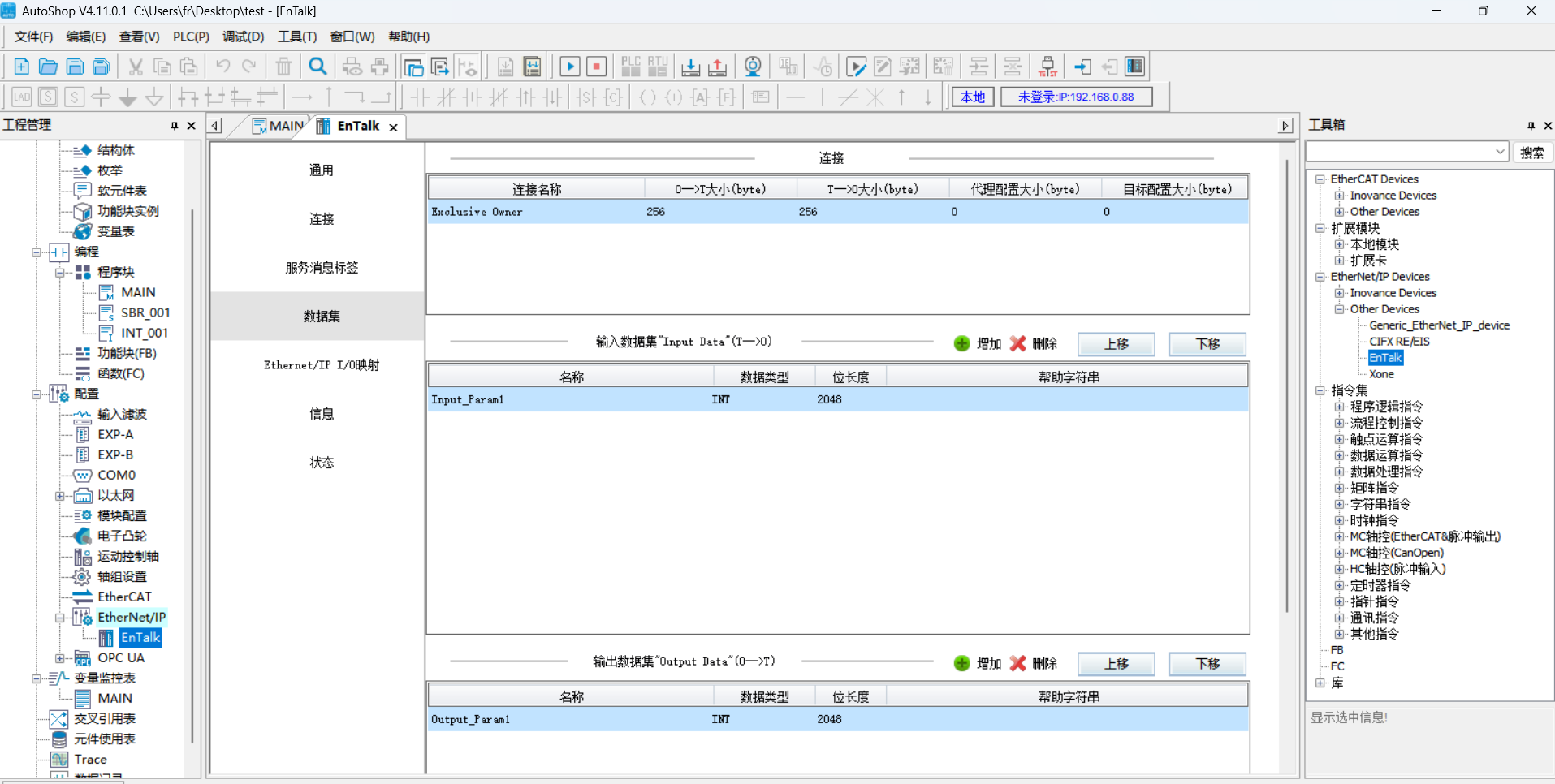
Kliknij i wybierz „Połączenie”, aby ustawić rozmiar bajtów wejścia/wyjścia danych:
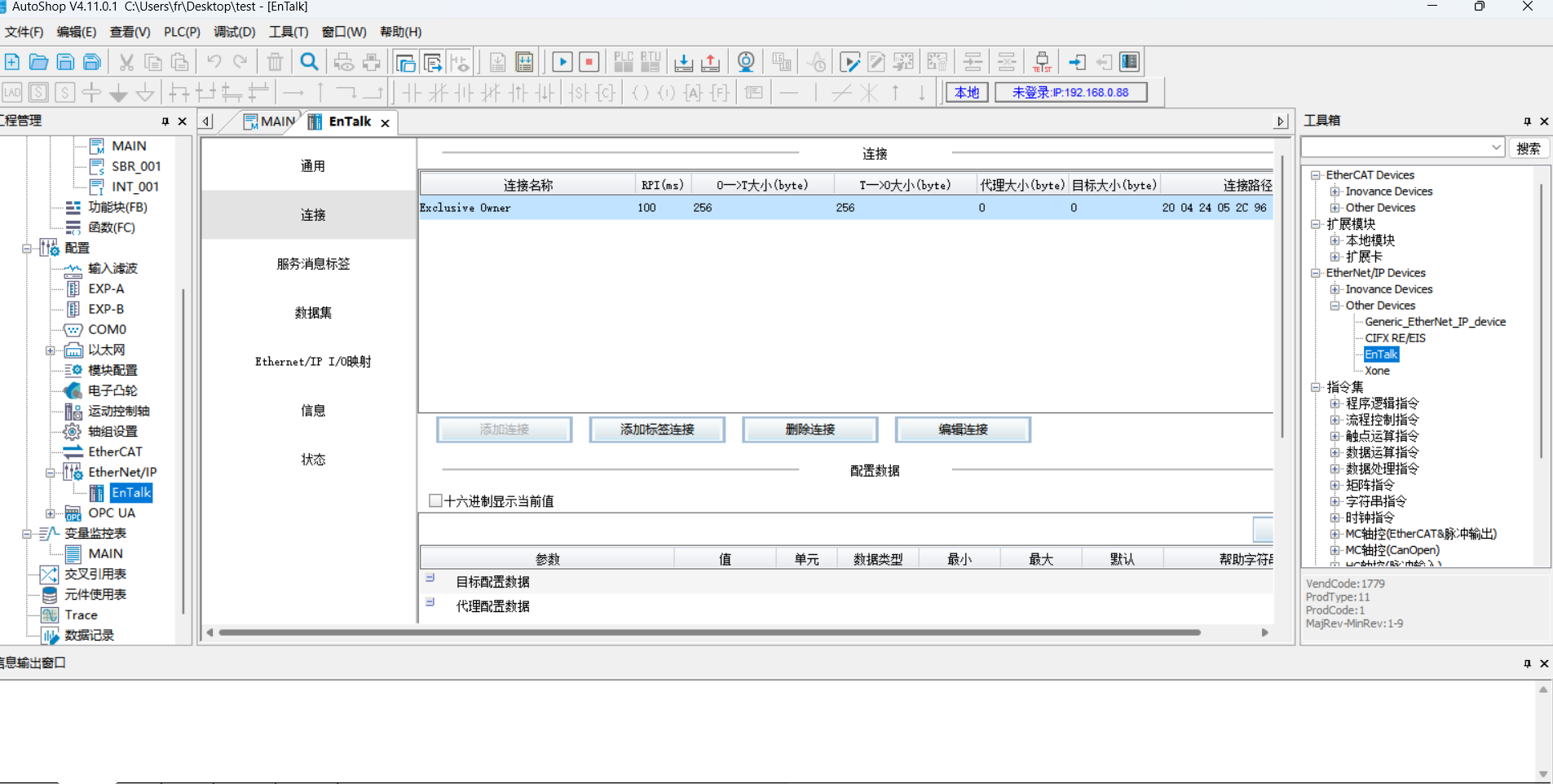
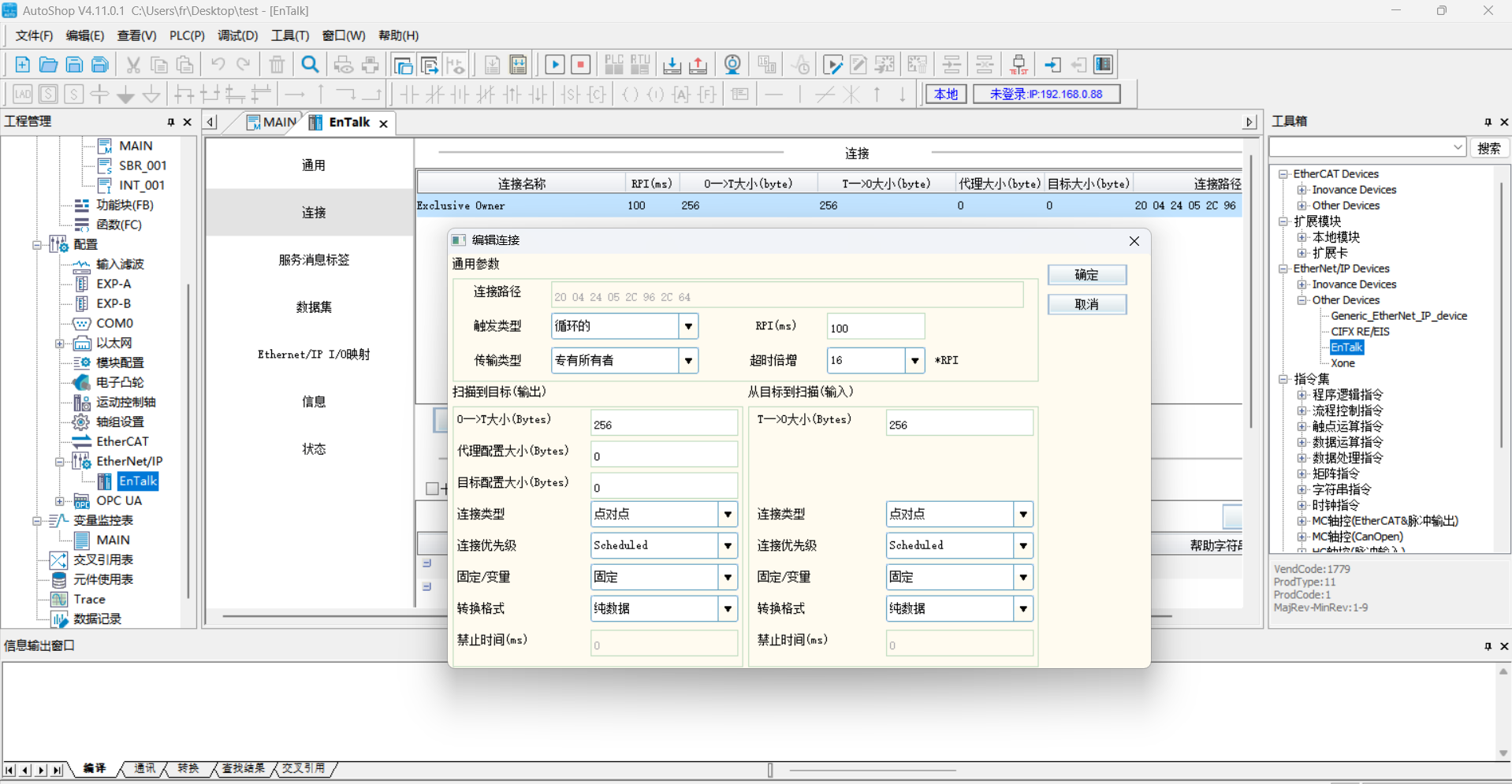
Kliknij „Edytuj połączenie”, w oknie dialogowym zmień liczbę bajtów wejścia i wyjścia na 256:
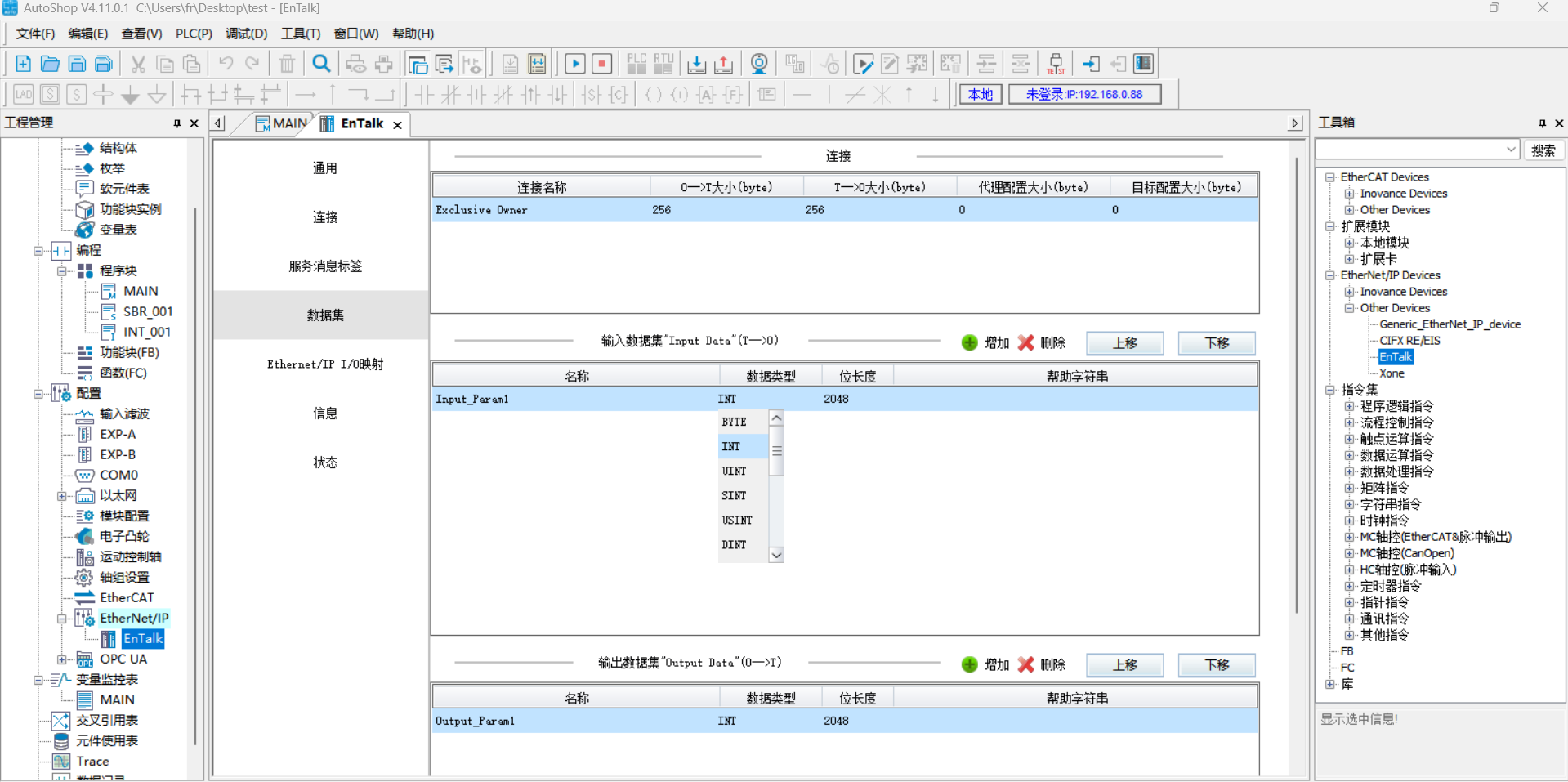
Kliknij i wybierz „Zbiór danych”, ustaw typ danych wejścia/wyjścia na „INT”, a długość bitu na „2048”:
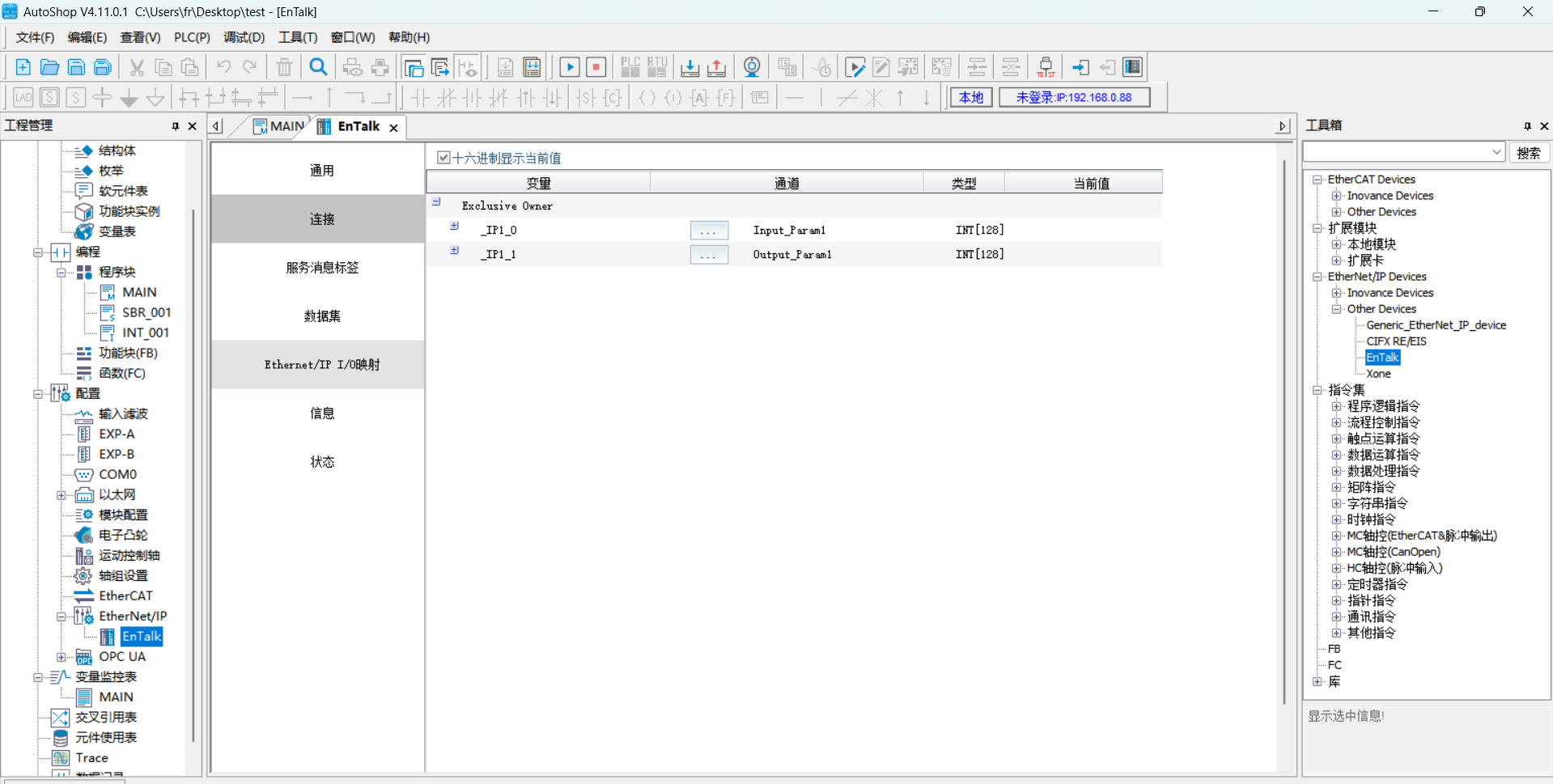
Po pomyślnym ustawieniu parametrów „Zbioru danych”, kliknij i wybierz „Mapowanie I/O EtherNet/IP”, a następnie wprowadź odpowiednio D0 i D200, które odpowiadają adresom początkowym tablicy odbiorczej i nadawczej po stronie PLC.
Pobranie programu
Otwórz program testowy, zmień adres IP PLC na znajdujący się w tej samej podsieci co karta, uruchom program po pobraniu.
19.2.2.2. Profinet Siemens
Import pliku GSD (pliku XML)
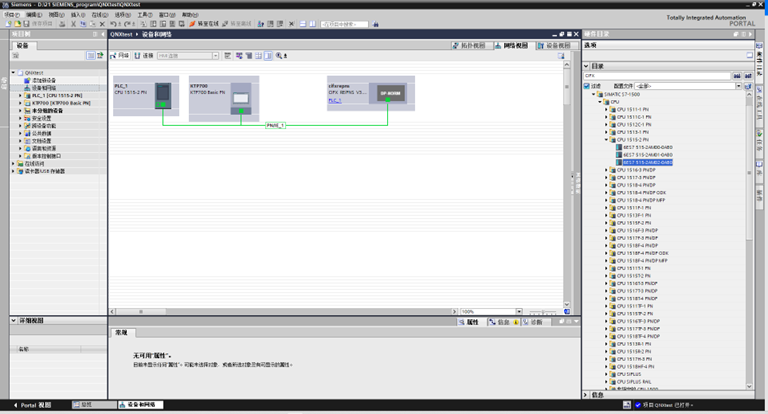
Otwórz oprogramowanie programistyczne Siemens TIA Portal V17, utwórz nowy projekt PLC, wybierz „Urządzenia i sieci”, w „Katalogu sprzętu” po prawej stronie wybierz i kliknij dwukrotnie 6ES7 515-2AM02-0AB0, aby dodać moduł PLC.
W oprogramowaniu TIA PORTAL, na pasku menu wybierz „Opcje” -> „Zarządzaj ogólnymi plikami opisu urządzenia (GSD)”, aby zainstalować lub usunąć już zainstalowane pliki GSD.
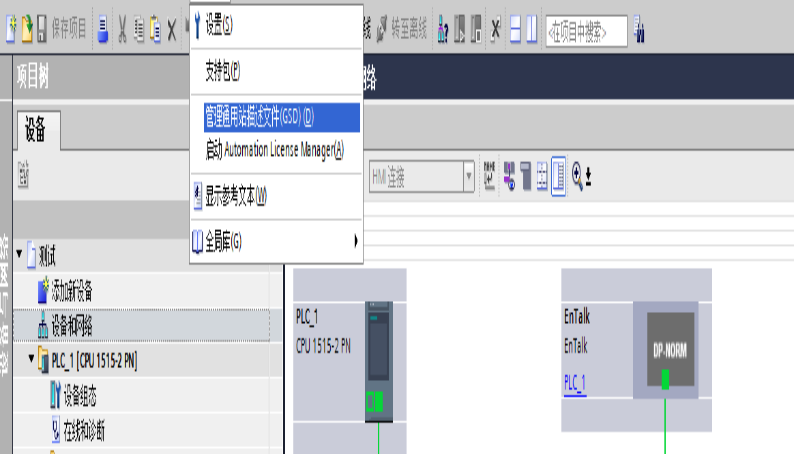
Aby zainstalować plik GSD, wybierz powyższe „Zarządzaj ogólnymi plikami opisu urządzenia (GSD)”, pojawi się okno „Zarządzanie ogólnymi plikami opisu urządzenia”.
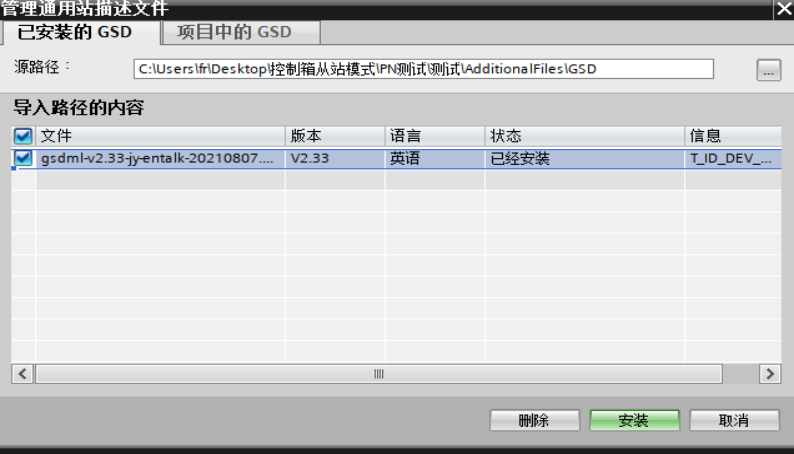
Wybierz folder z plikami GSD do instalacji ze „Ścieżki źródłowej”, wybierz jeden lub więcej plików do instalacji z wyświetlonej listy plików GSD, a następnie kliknij przycisk „Instaluj”. Jak pokazano na rysunku.
Po pomyślnej instalacji, w katalogu sprzętu, w innych urządzeniach terenowych, można znaleźć urządzenia z zainstalowanym plikiem GSD, jak pokazano na rysunku.
Przydział IO: W katalogu znajdź moduł i przeciągnij Input oraz Output.
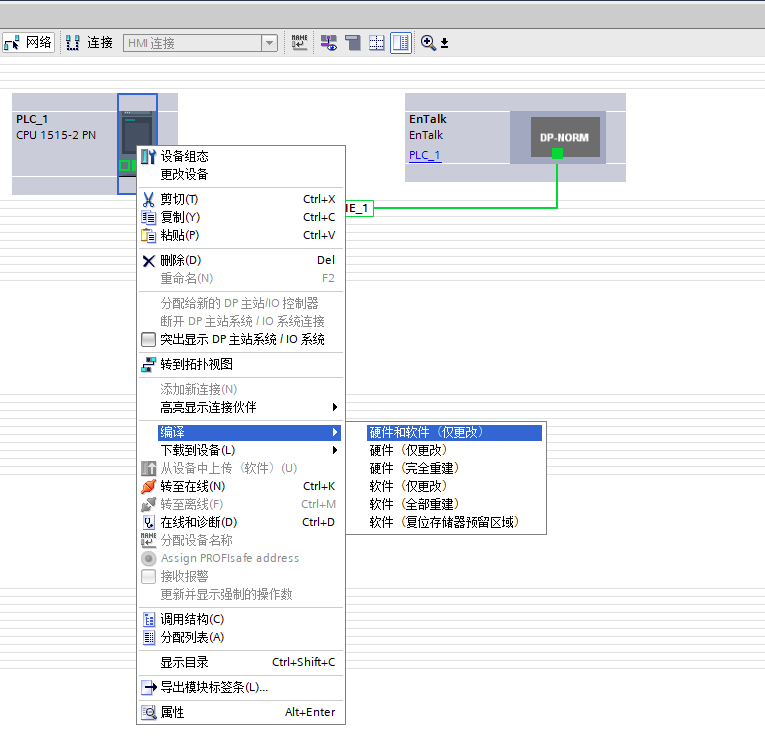
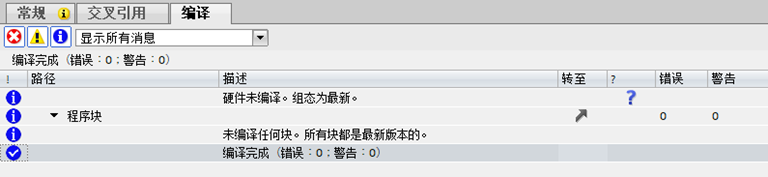
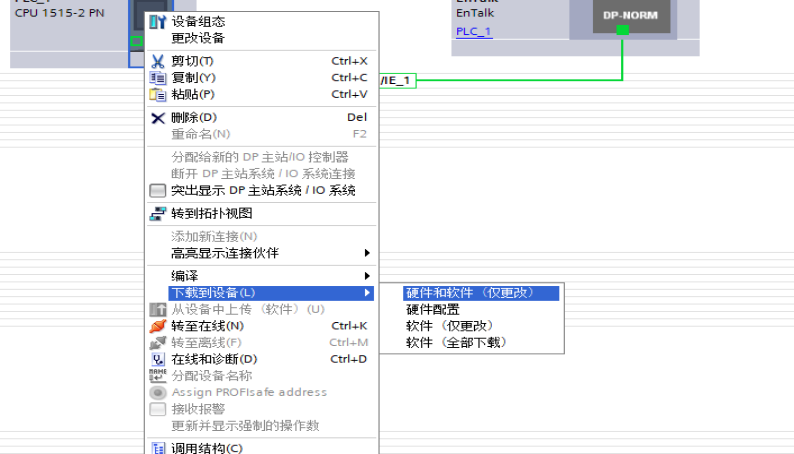
Kompilacja programu: W drzewie projektu po lewej stronie kliknij dwukrotnie, aby wejść w „Urządzenia i sieci”, kliknij prawym przyciskiem myszy moduł „PLC_1”, z menu rozwijanego wybierz kompilację, następnie wybierz „Sprzęt i oprogramowanie (tylko zmiany)”. Po zakończeniu kompilacji na dole widoku oprogramowania pojawi się komunikat „Kompilacja zakończona”:
Pobranie programu do urządzenia: W drzewie projektu po lewej stronie kliknij dwukrotnie, aby wejść w „Urządzenia i sieci”, kliknij prawym przyciskiem myszy moduł „PLC_1”, z menu rozwijanego wybierz „Pobierz do urządzenia”, następnie wybierz „Sprzęt i oprogramowanie (tylko zmiany)”:
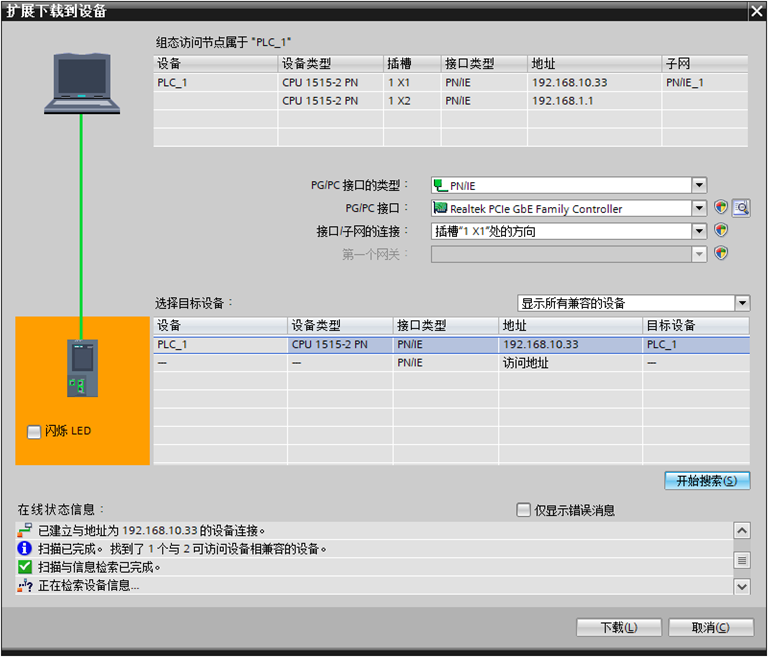
Wyszukaj i pobierz urządzenie: Po pojawieniu się okna dialogowego, skonfiguruj typ interfejsu PG/PC jak na rysunku, kliknij „Rozpocznij wyszukiwanie”, wybierz urządzenie, do którego ma zostać pobrany program, i kliknij „Pobierz”:
19.2.2.3. CC-link Mitsubishi
Ustawienia CC-Link IEF Basic
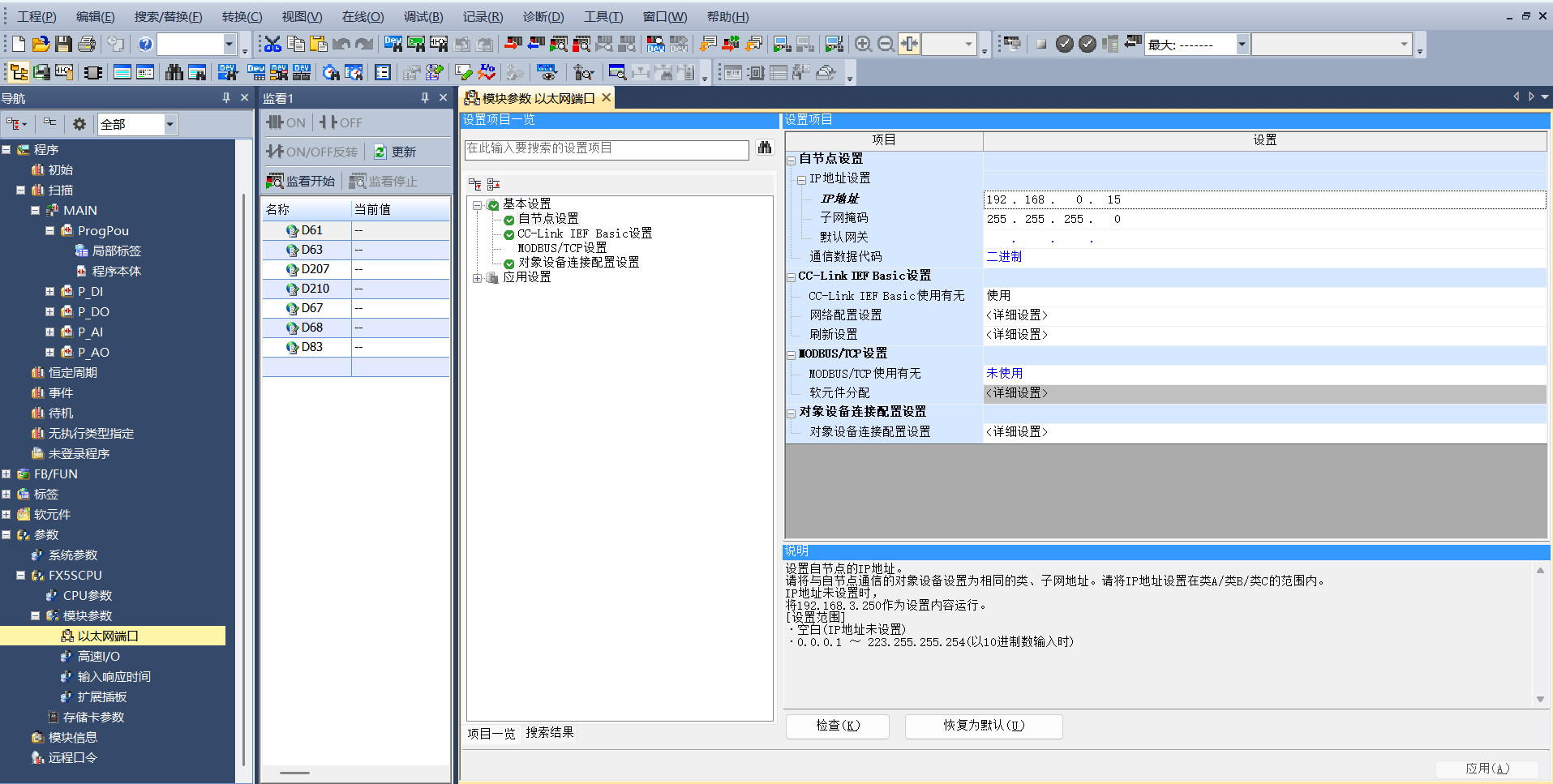
Włącz użycie CC-link: Na lewym pasku menu nawigacji wybierz „Port Ethernet”, ustaw adres IP PLC, aby znajdował się w tej samej podsieci co adres karty Jiyuan. Kliknij „Użycie CC-link IEF Basic”, wybierz „Użyj”:
Ustawienia konfiguracji sieci CC-Link: Również w ustawieniach CC-Link IEF Basic, wybierz „Ustawienia konfiguracji sieci”, jako moduł wybierz moduł ogólny CC-Link IEF Basic. Przeciągnij go do lewego dolnego rogu widoku, aby zakończyć konfigurację sprzętu:
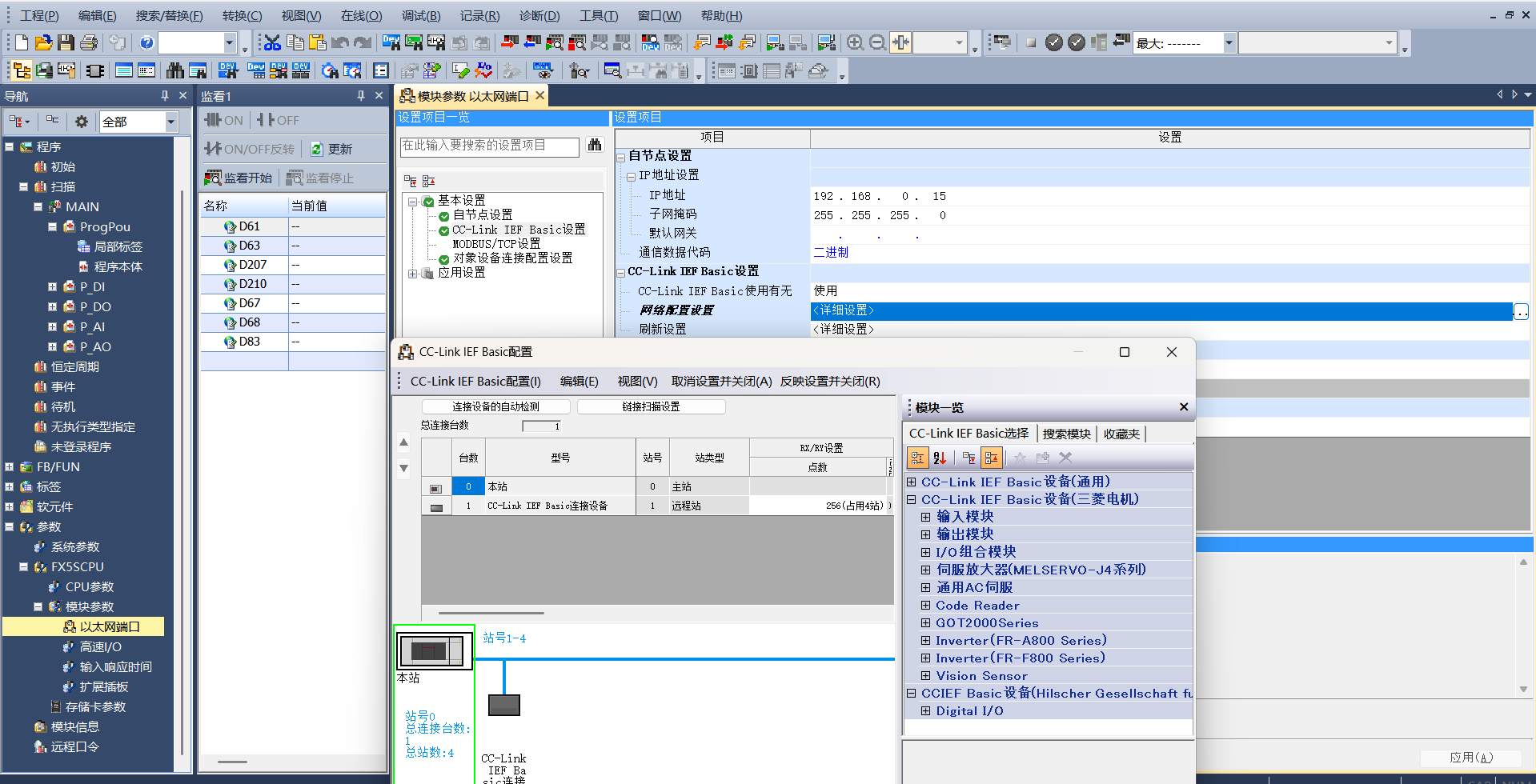
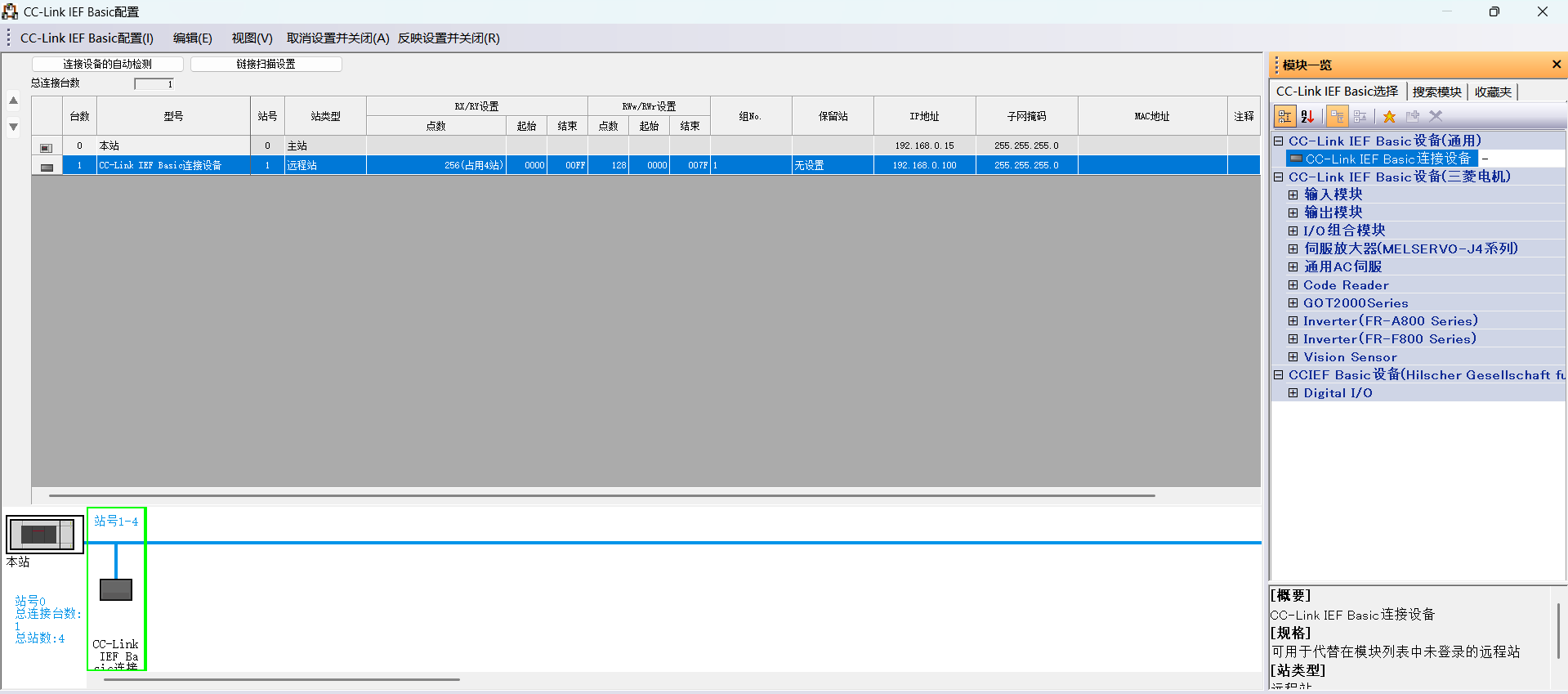
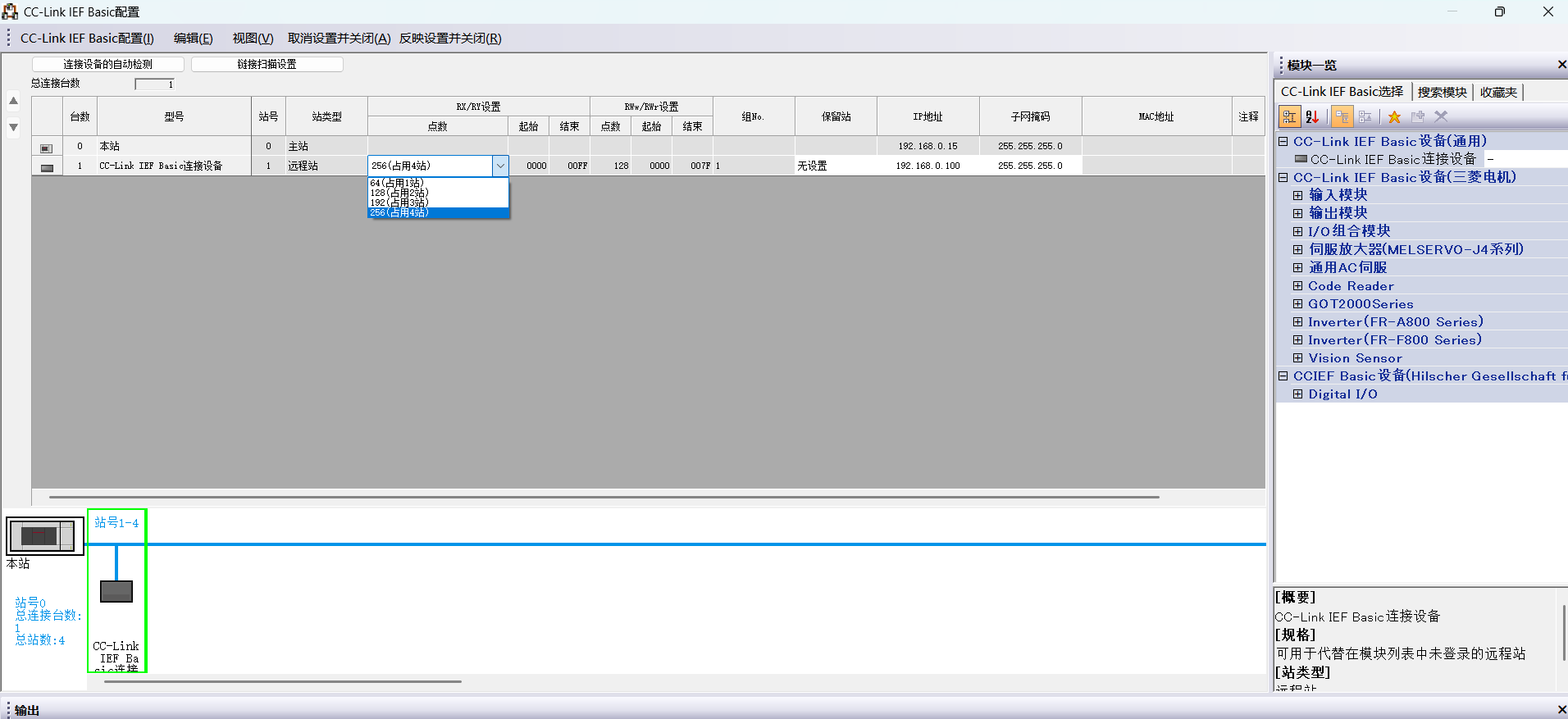
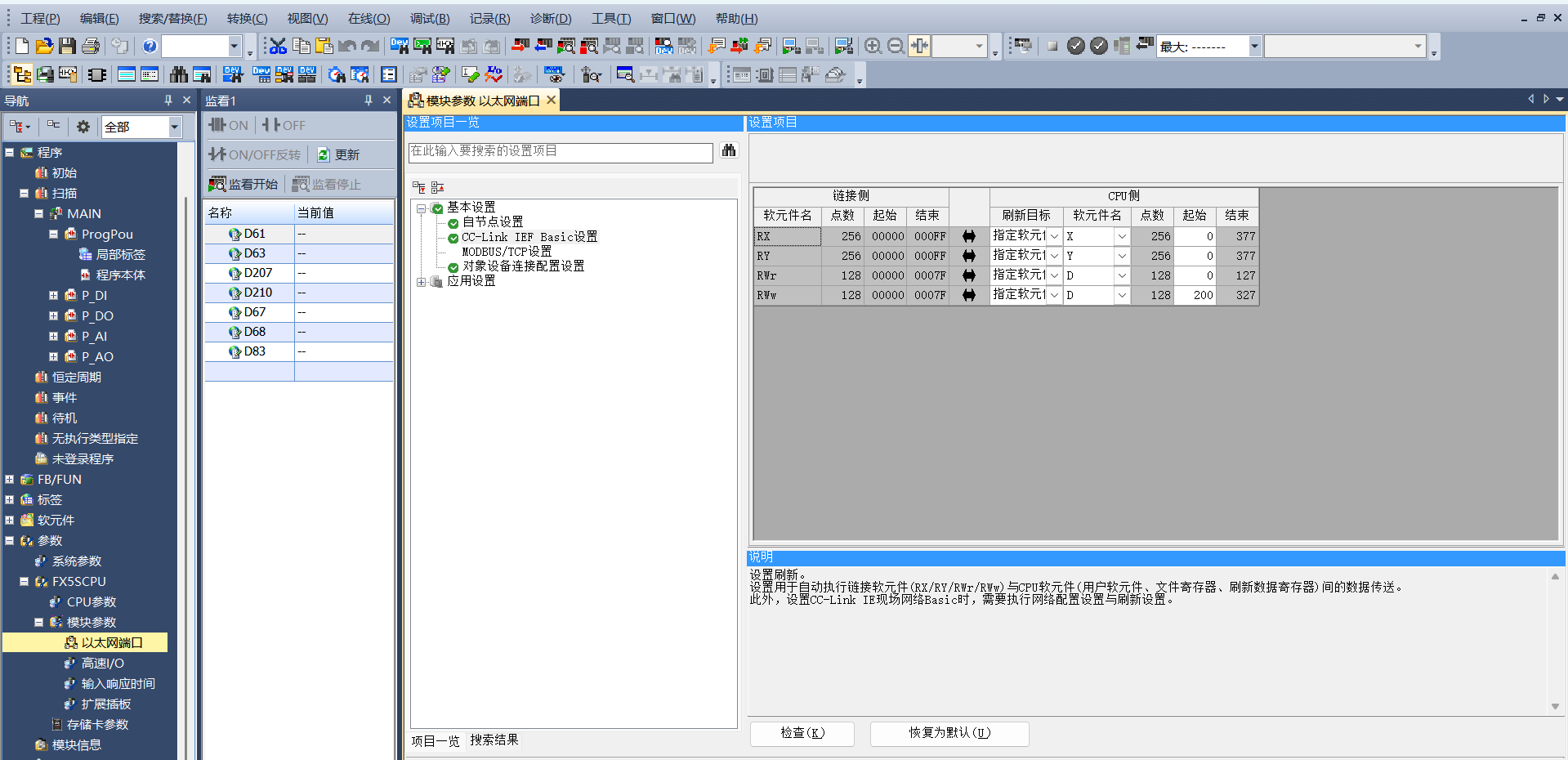
Ustaw liczbę punktów i adres IP węzła podrzędnego:
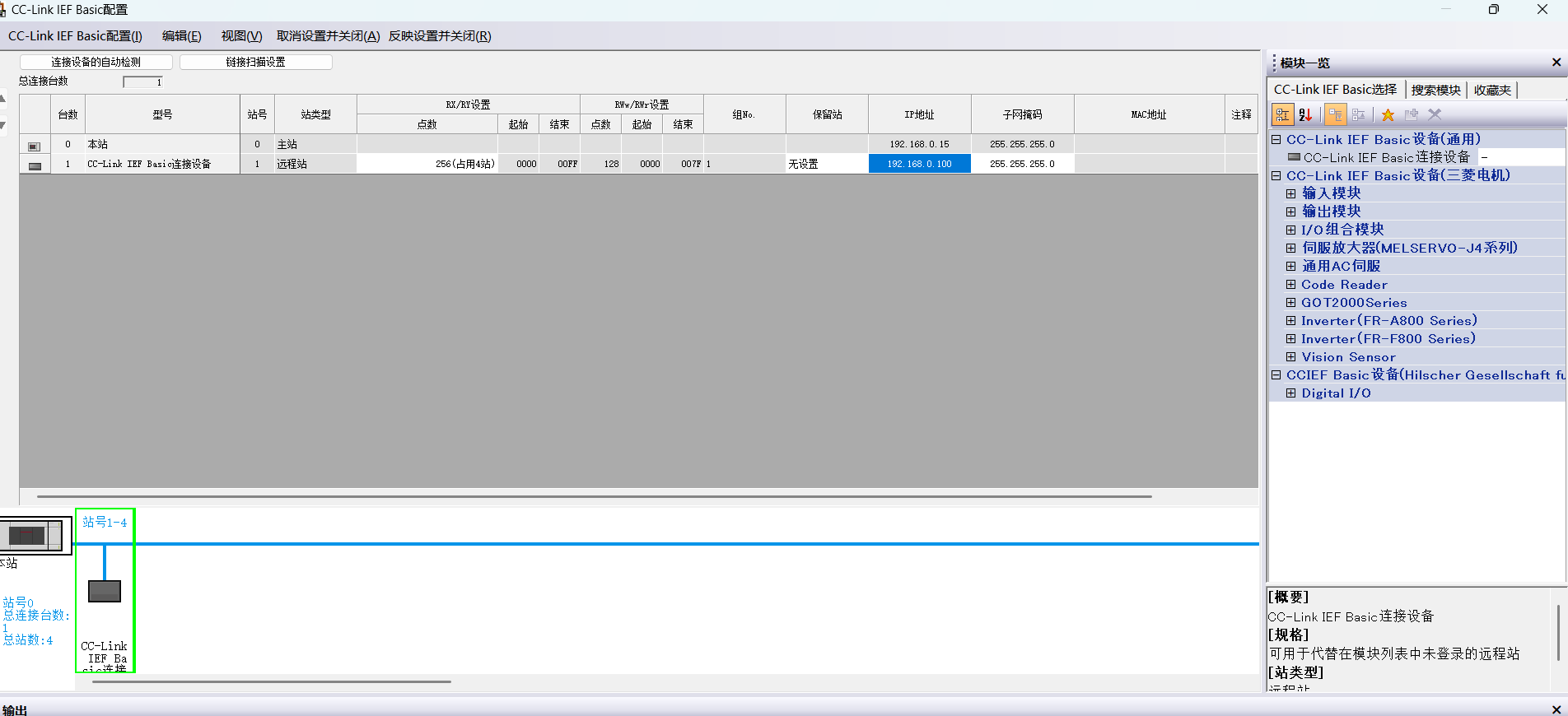
Ustawienia odświeżania CC-Link: Również w ustawieniach CC-Link IEF Basic, kliknij „Ustawienia odświeżania”, dostosuj ustawienia transmisji: 256 bajtów odbioru, 256 bajtów wysyłania.
Pobranie programu
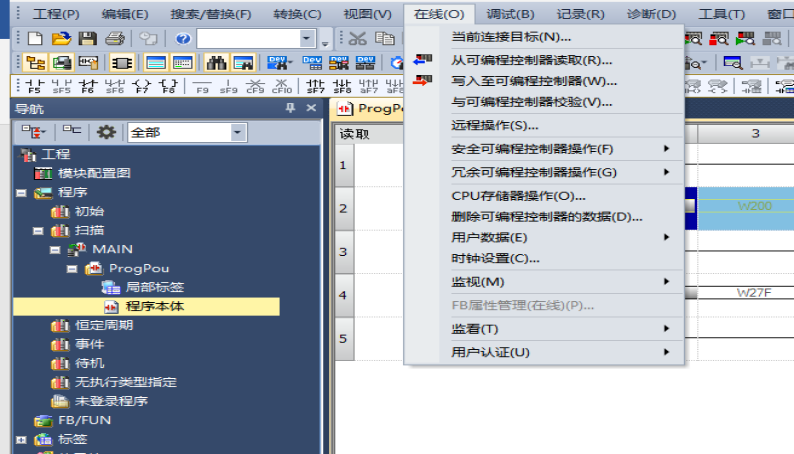
Po otwarciu programu testowego kliknij „Online” → „Zapisz do programowalnego sterownika”, aby przejść do interfejsu pobierania.
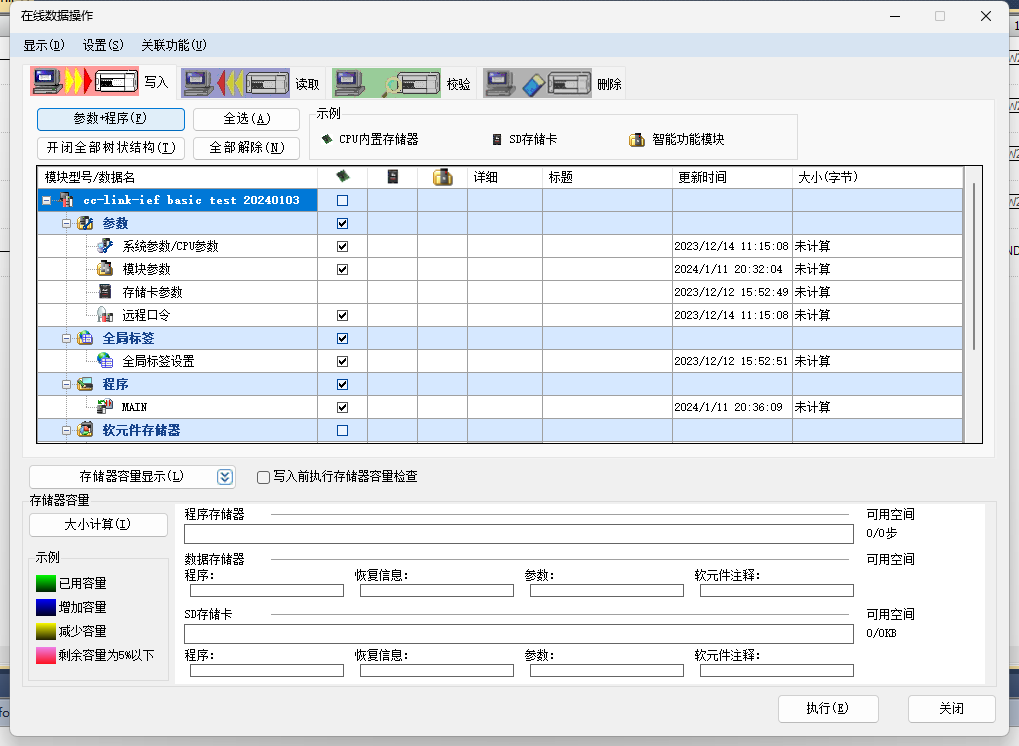
Po otwarciu interfejsu pobierania kliknij „Parametry + program” w lewym górnym rogu, a następnie kliknij „Wykonaj” w prawym dolnym rogu, aby rozpocząć pobieranie. Poczekaj na zakończenie pobierania.
19.2.2.4. EtherCAT Inovance
Import pliku XML
Otwórz oprogramowanie programistyczne Inovance AutoShop, utwórz nowy projekt PLC, w panelu narzędzi po prawej stronie wybierz „EtheCATDevices”:
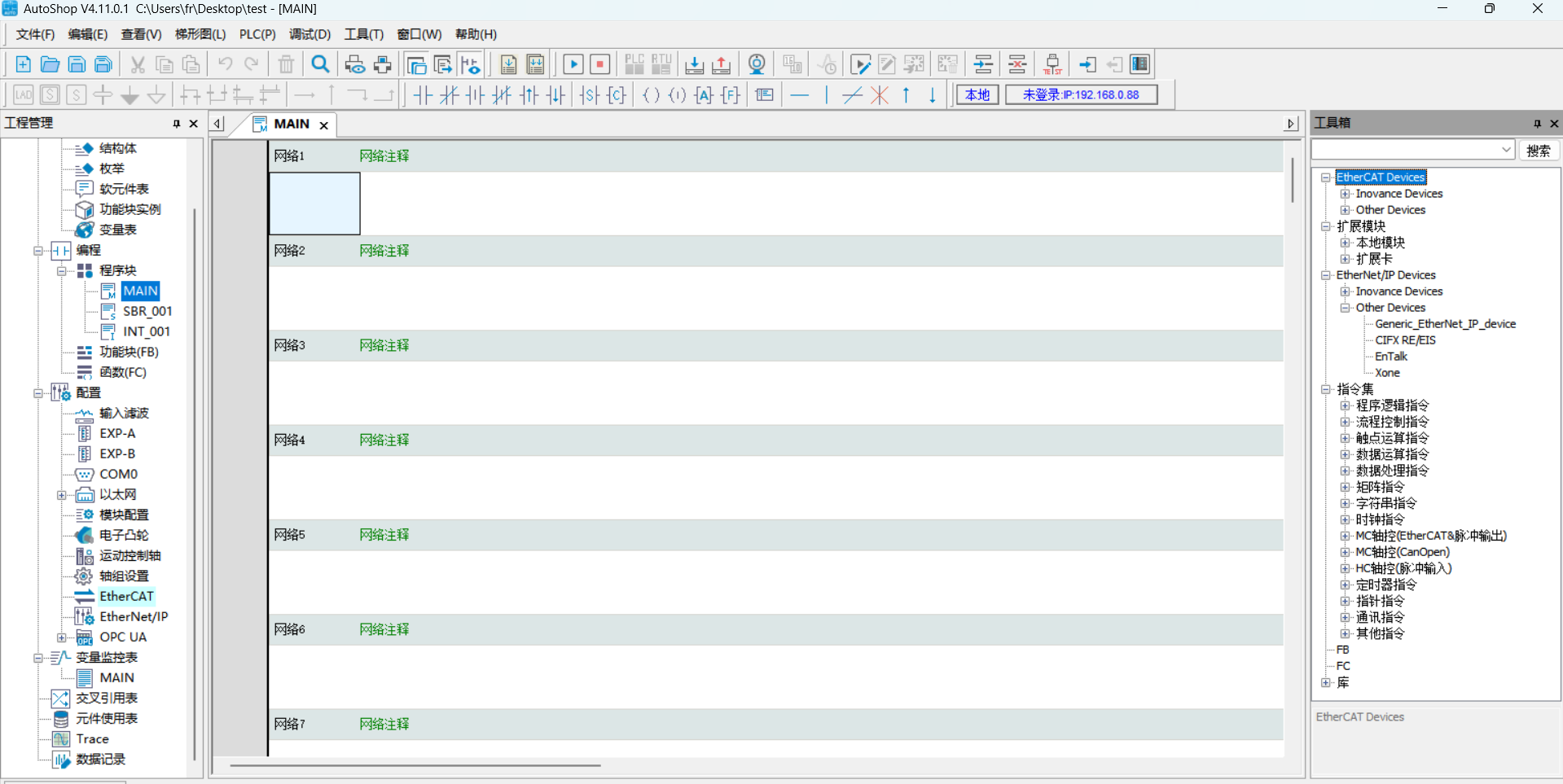
Kliknij lewym przyciskiem myszy na „EtheCATDevices”, następnie kliknij prawym przyciskiem, aby wywołać okno dialogowe „Importuj urządzenie XML”, potwierdź lewym przyciskiem i znajdź folder z plikiem XML karty.
Po pomyślnym imporcie nazwa karty pojawi się w katalogu „EtherCAT Devices”. Zamknij projekt i otwórz go ponownie, proces importu pliku XML został zakończony.
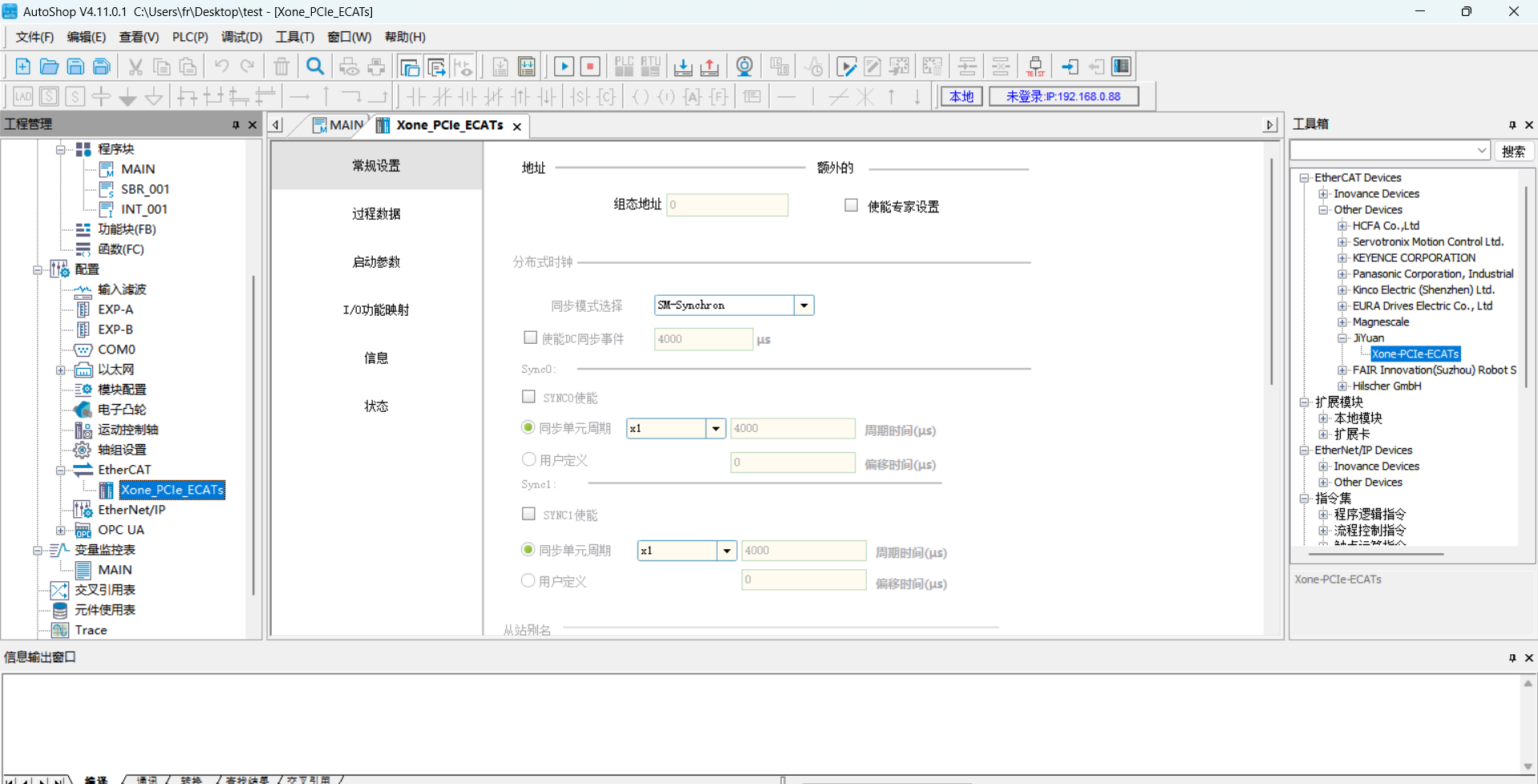
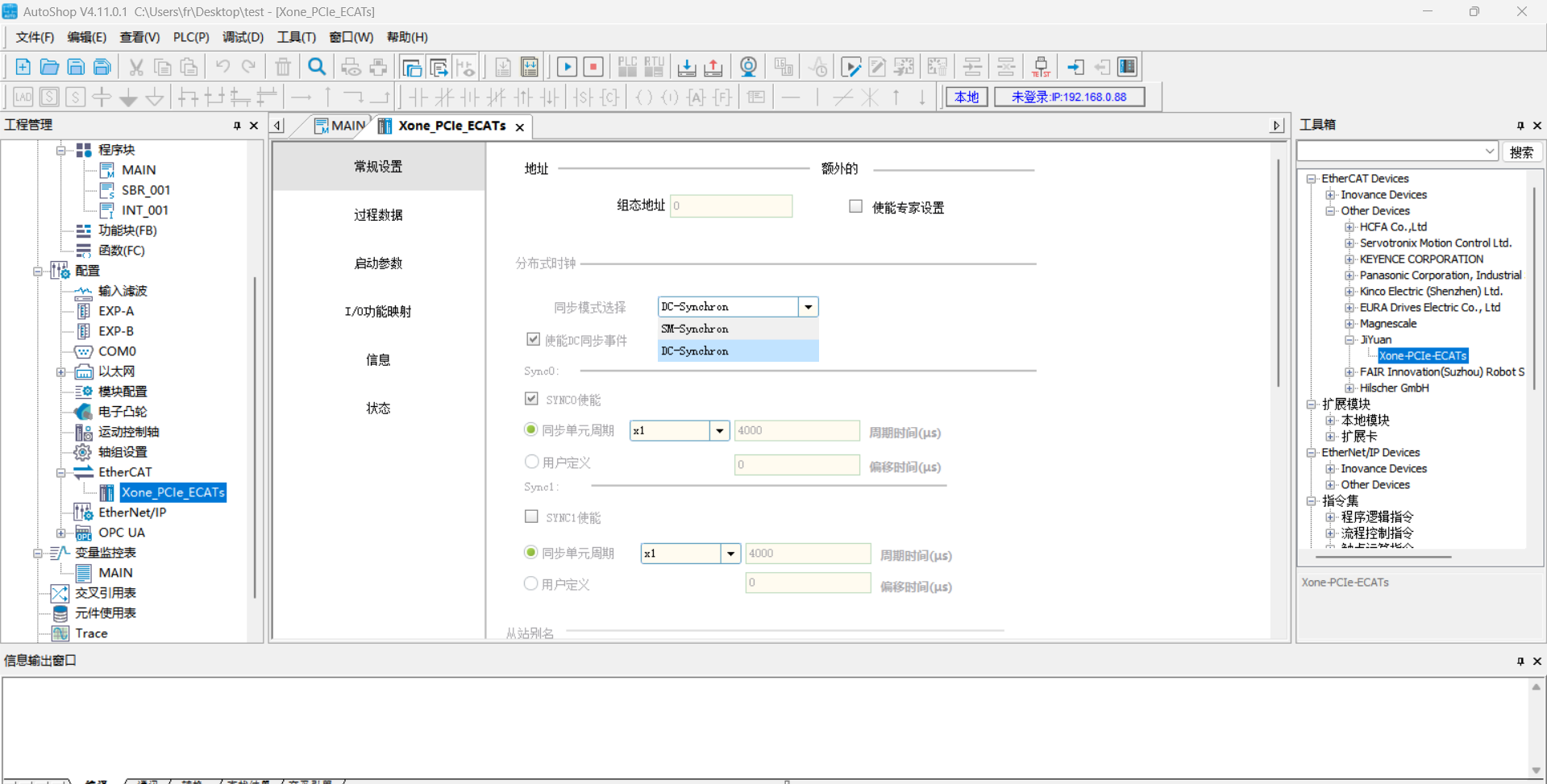
Dodanie węzła podrzędnego EtherCAT
Panel narzędzi po prawej stronie → „EtehrCAT Devices” → „Other Devices” → „JIYuan” → „Xone-PCIe-ECATs”, kliknij dwukrotnie myszą na „Xone-PCIe-ECATs”, aby dodać węzeł podrzędny EtherCAT. Po dodaniu, po lewej stronie w projekcie, w sekcji mastera EtherCAT, węzeł podrzędny został dodany pomyślnie.
Dodanie PDO
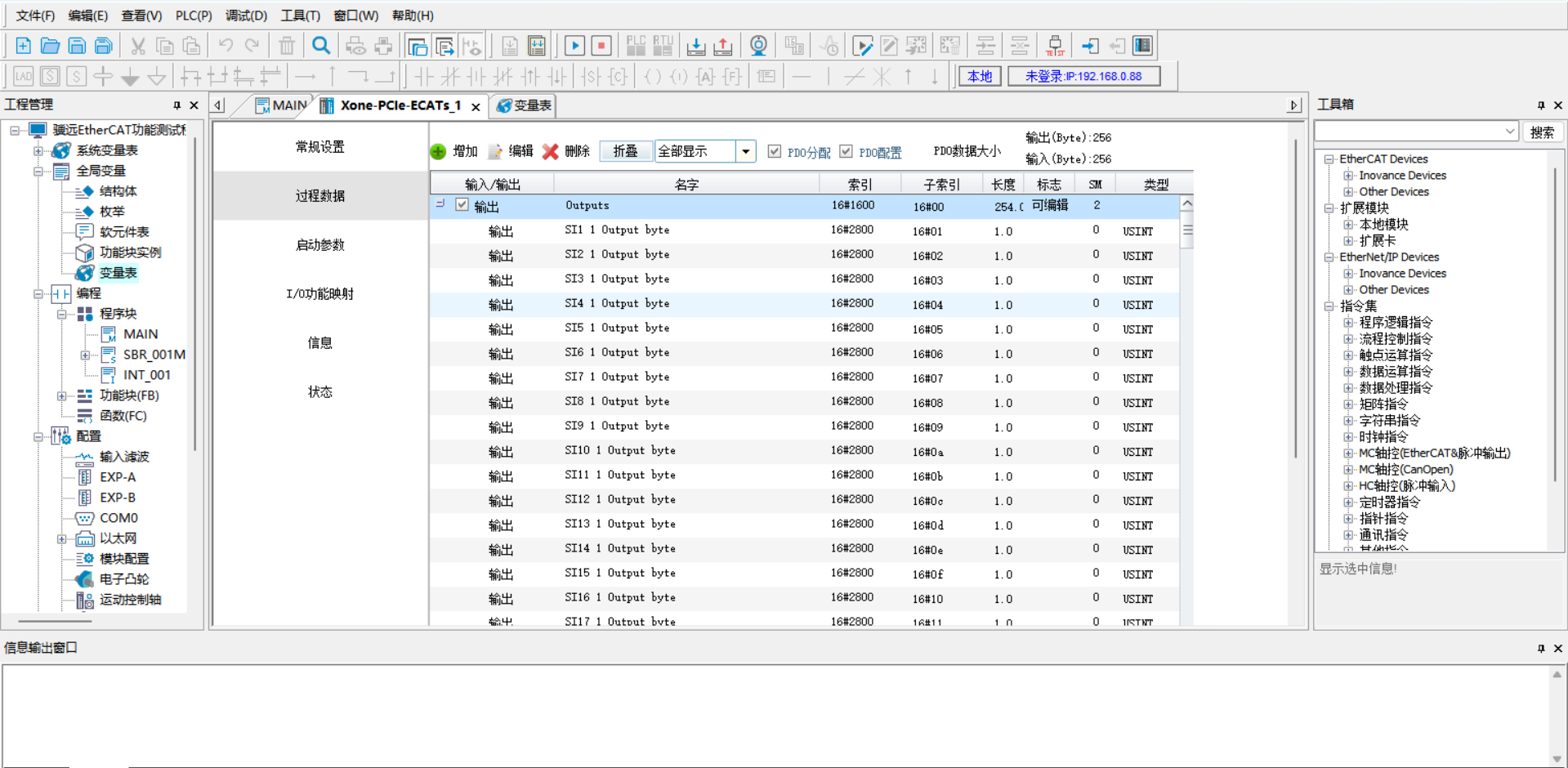
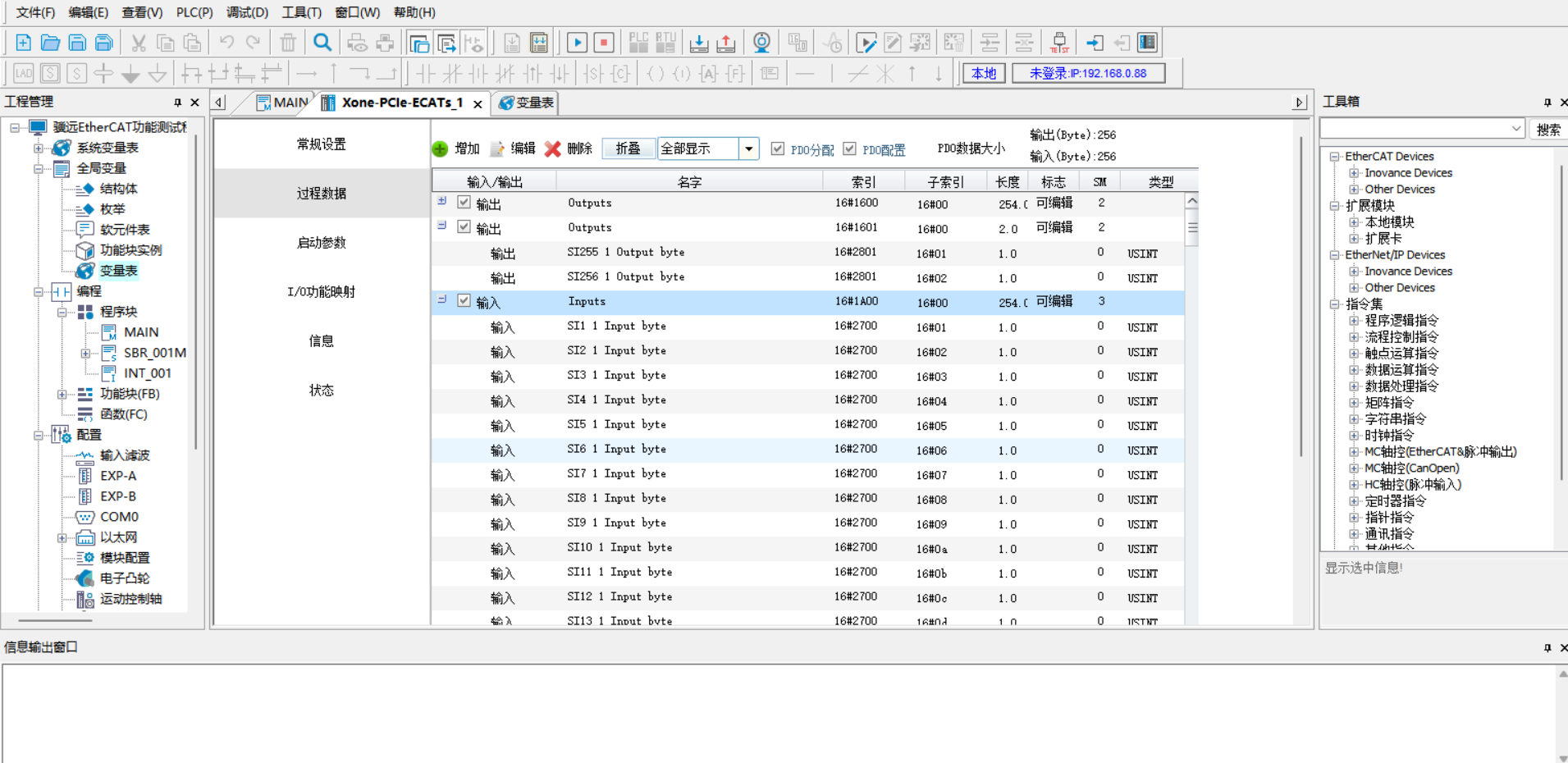
Mapowanie adresów EtherCAT
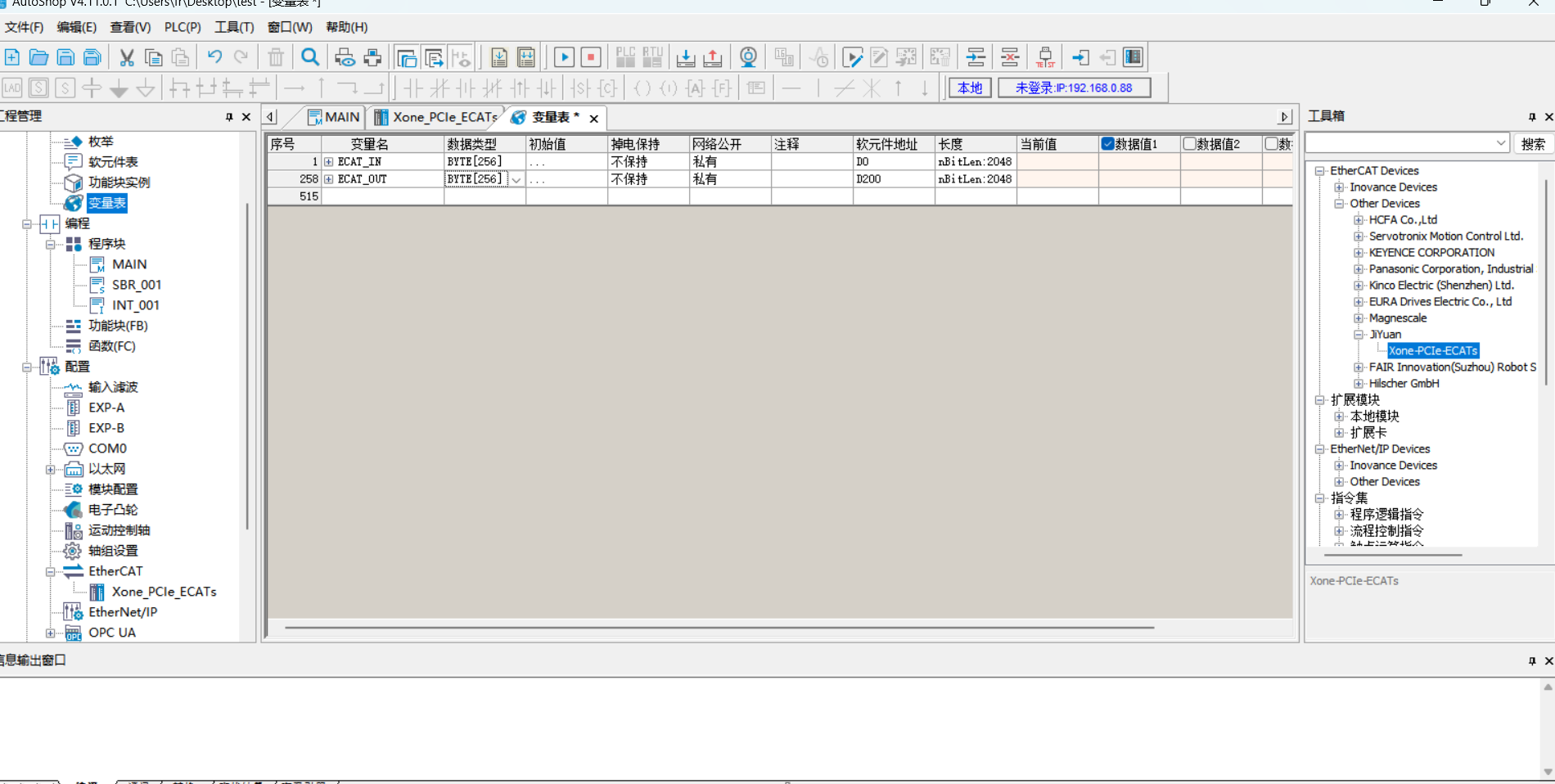
Kliknij dwukrotnie tabelę zmiennych na lewym pasku narzędzi, utwórz nową tablicę wejściową o rozmiarze 256 bajtów, z adresem elementu miękkiego D0. Utwórz nową tablicę wyjściową o rozmiarze 256 bajtów, z adresem elementu miękkiego D200.
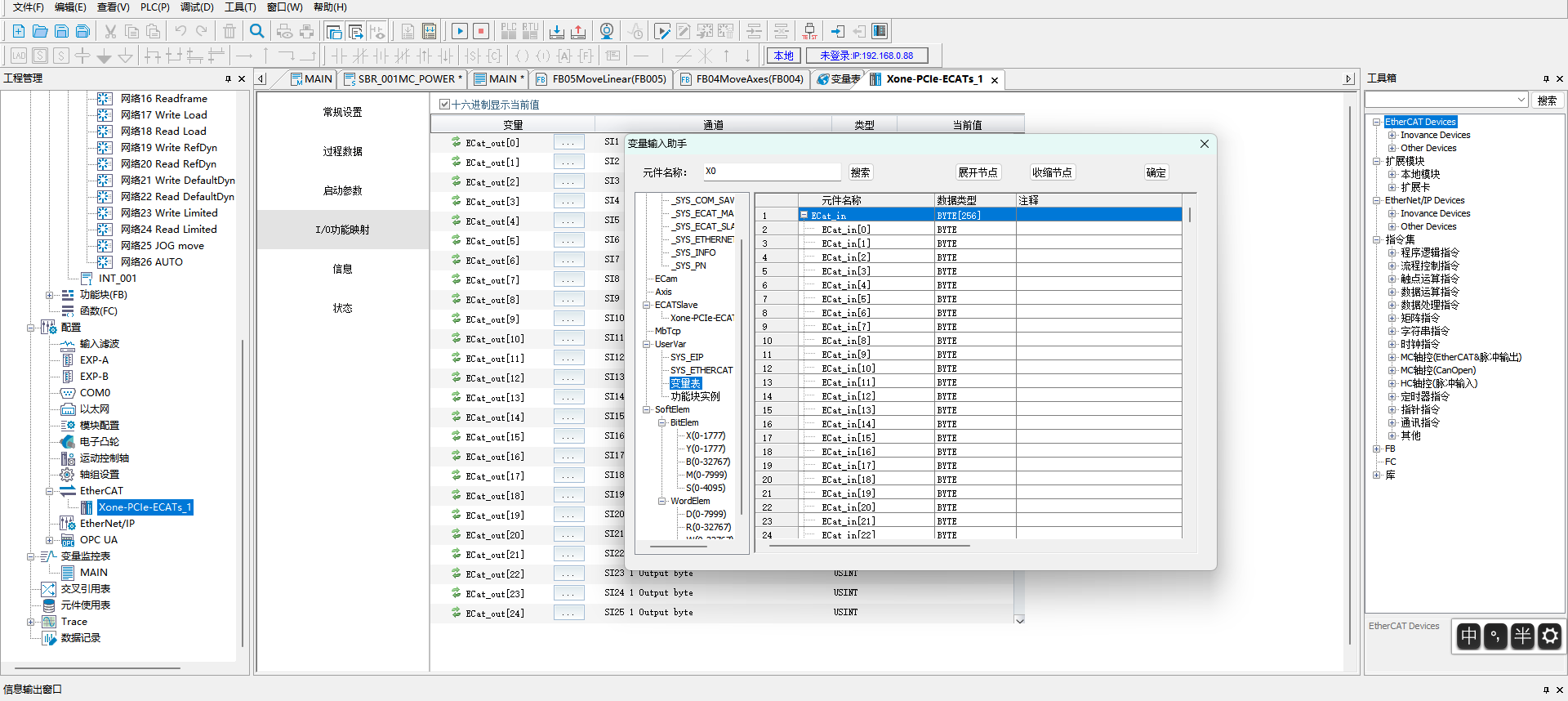
W sekcji „EtherCAT” na lewym pasku narzędzi, kliknij dwukrotnie „Xone-PCIe-ECATs”, w oknie dialogowym kliknij „Mapowanie funkcji I/O”, kliknij pole, aby powiązać adres zmiennej. W oknie dialogowym kliknij „Tabela zmiennych”, wybierz odpowiednie wejście/wyjście, kliknij OK. Pozostałe adresy wiąż w podobny sposób, w kolejności.
Pobranie programu
Otwórz program testowy, zmień adres IP PLC na znajdujący się w tej samej podsieci co karta, uruchom program po pobraniu.
19.3. Opis operacji związanych z trybem węzła podrzędnego robota
19.3.1. Ładowanie trybu węzła podrzędnego
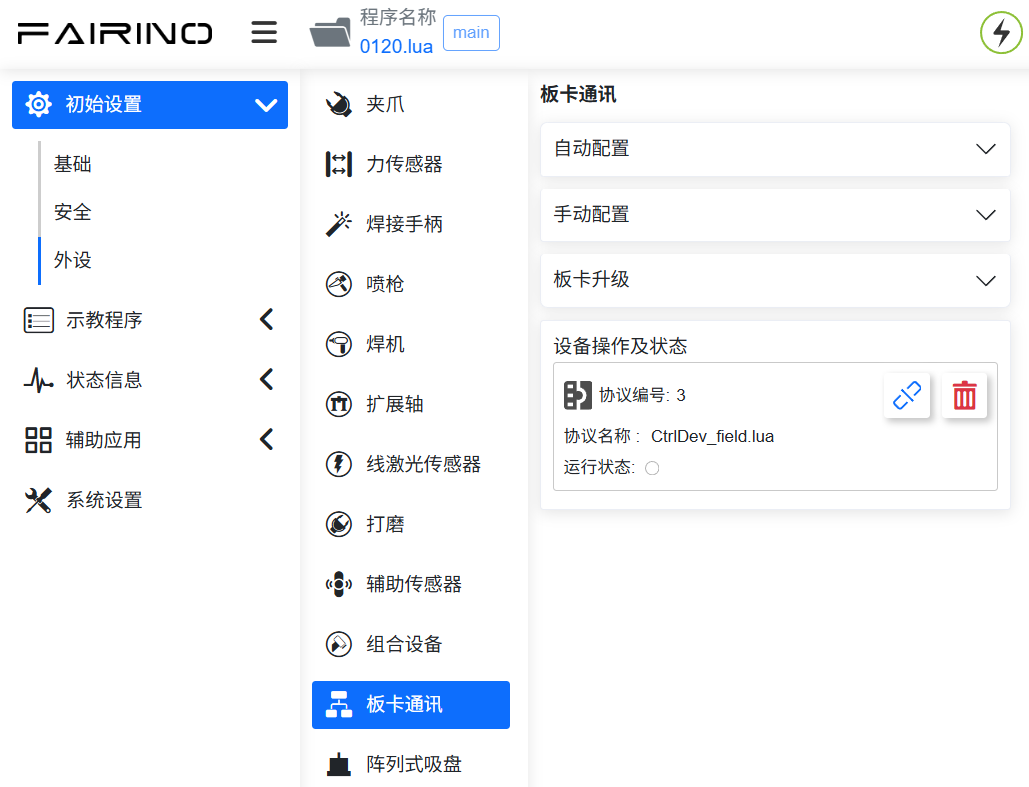
Otwórz WebApp, przejdź do Ustawienia początkowe -> Urządzenia peryferyjne -> Komunikacja z kartą -> Konfiguracja ręczna.
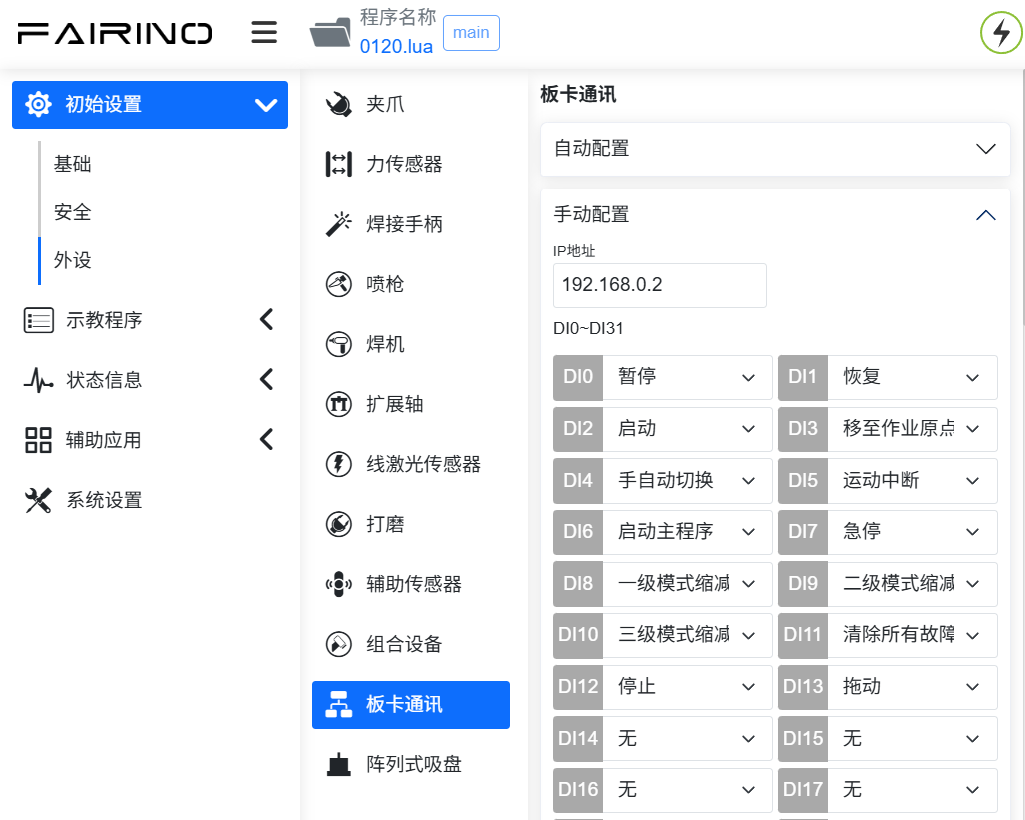
Najpierw skonfiguruj adres IP karty. Jeśli nie zostanie wypełniony, karta uruchomi się z domyślnym adresem IP: 192.168.0.100. Obecnie konfiguracja IP dotyczy tylko protokołów EIP i CC-link. W przypadku protokołu PN, adres IP jest przydzielany przez mastera PLC podczas skanowania urządzenia podrzędnego.
Informacja
Po zmianie adresu IP na stronie, konieczne jest załadowanie trybu węzła podrzędnego, aby zmiana została zastosowana.
Następnie wybierz kolejno funkcje mapowania dla DI, DO, AO (patrz Dodatek). Znaczenie poszczególnych parametrów jest następujące:
DI do sterowania robotem: Węzeł podrzędny robota odbiera sygnały wejściowe z zewnątrz i wykonuje mapowaną funkcję;
DO do wyjścia stanu robota: Węzeł podrzędny robota wysyła sygnały zwrotne stanu do mastera;
AO do sprzężenia zwrotnego stanu robota: Węzeł podrzędny robota wysyła dane zwrotne stanu do mastera, AO0~AO15 to liczby całkowite ze znakiem (int16), AO16~AO31 to liczby zmiennoprzecinkowe pojedynczej precyzji (float).
Kliknij przycisk „Konfiguruj”, aby wygenerować plik lua protokołu otwartego.
Informacja
Plik lua protokołu otwartego obsługuje pobieranie. Można go zaimportować na interfejsie automatycznej konfiguracji.
Przykład wygenerowanego programu:
1local id = 3
2local ctrlDI = {0, 0, 0, 0, 0, 0}
3local funcDI = {0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0}
4local DOState = {0, 0, 0, 0, 0, 0, 0, 0}
5local AOState = {0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0}
6-- Launch the board communication process
7SetFieldBusIP("192.168.0.99")
8LoadFieldBusSlave()
9sleep_ms(8000)
10while(1) do
11 -- Set the DO status
12 CtrlBoxDO, CtrlBoxCO, CtrlBoxDI, CtrlBoxCI, errState, motionState, moveToOriginState, robotStartDoneState, modeChangeState, programStartStopState, emergencyState, reduceState, collision, enablestate, safetyStop0, safetyStop1, pauseState, interfereState = GetRobotFuncDOState()
13 DOState[1] = CtrlBoxDO
14 DOState[2] = CtrlBoxCO
15 DOState[3] = CtrlBoxDI
16 DOState[4] = CtrlBoxCI
17 local ctrlWord0 = 0
18 ctrlWord0 = SetBitWithIndex(ctrlWord0, 0, errState)
19 ctrlWord0 = SetBitWithIndex(ctrlWord0, 1, motionState)
20 ctrlWord0 = SetBitWithIndex(ctrlWord0, 2, moveToOriginState)
21 ctrlWord0 = SetBitWithIndex(ctrlWord0, 3, robotStartDoneState)
22 ctrlWord0 = SetBitWithIndex(ctrlWord0, 4, modeChangeState)
23 ctrlWord0 = SetBitWithIndex(ctrlWord0, 5, programStartStopState)
24 ctrlWord0 = SetBitWithIndex(ctrlWord0, 6, emergencyState)
25 ctrlWord0 = SetBitWithIndex(ctrlWord0, 7, reduceState)
26 DOState[5] = ctrlWord0
27 local ctrlWord1 = 0
28 ctrlWord1 = SetBitWithIndex(ctrlWord1, 0, collision)
29 ctrlWord1 = SetBitWithIndex(ctrlWord1, 1, enablestate)
30 ctrlWord1 = SetBitWithIndex(ctrlWord1, 2, safetyStop0)
31 ctrlWord1 = SetBitWithIndex(ctrlWord1, 3, safetyStop1)
32 ctrlWord1 = SetBitWithIndex(ctrlWord1, 4, pauseState)
33 ctrlWord1 = SetBitWithIndex(ctrlWord1, 5, interfereState)
34 DOState[6] = ctrlWord1
35 SetFieldBusDOState(DOState)
36
37 -- Set the AO status
38 mainErrCode, subErrCode, TCPSpeed, axisPos1, axisPos2, axisPos3, axisPos4, axisPos5, axisPos6, jointVelFeedback1, jointVelFeedback2, jointVelFeedback3, jointVelFeedback4, jointVelFeedback5, jointVelFeedback6, jointCurFeedback1, jointCurFeedback2, jointCurFeedback3,jointCurFeedback4,jointCurFeedback5,jointCurFeedback6, jointTorqueFeedback1, jointTorqueFeedback2,jointTorqueFeedback3,jointTorqueFeedback4, jointTorqueFeedback5, jointTorqueFeedback6, cartPosx, cartPosy, cartPosz, cartPosrx, cartPosry, cartPosrz = GetRobotFuncAOState()
39 AOState[1] = mainErrCode
40 AOState[2] = subErrCode
41 AOState[17] = axisPos1
42 AOState[18] = axisPos2
43 AOState[19] = axisPos3
44 AOState[20] = axisPos4
45 AOState[21] = axisPos5
46 AOState[22] = axisPos6
47 AOState[23] = cartPosx
48 AOState[24] = cartPosy
49 AOState[25] = cartPosz
50 AOState[26] = cartPosrx
51 AOState[27] = cartPosry
52 AOState[28] = cartPosrz
53 SetFieldBusAOState(AOState)
54 sleep_ms(10)
55
56 -- Set the DI status
57 -- Configue the DI function and update it in real-time
58 ctrlDI[1],ctrlDI[2],ctrlDI[3],ctrlDI[4],ctrlDI[5],ctrlDI[6] = GetFieldBusDIState()
59 funcDI[1] = ctrlDI[1]
60 funcDI[2] = ctrlDI[2]
61 funcDI[3] = GetBitWithIndex(ctrlDI[3], 0)
62 funcDI[4] = GetBitWithIndex(ctrlDI[3], 1)
63 funcDI[5] = GetBitWithIndex(ctrlDI[3], 2)
64 funcDI[6] = GetBitWithIndex(ctrlDI[3], 3)
65 funcDI[7] = GetBitWithIndex(ctrlDI[3], 4)
66 funcDI[8] = GetBitWithIndex(ctrlDI[3], 5)
67 funcDI[9] = GetBitWithIndex(ctrlDI[3], 6)
68 funcDI[10] = GetBitWithIndex(ctrlDI[3], 7)
69 funcDI[11] = GetBitWithIndex(ctrlDI[4], 0)
70 funcDI[12] = GetBitWithIndex(ctrlDI[4], 1)
71 funcDI[13] = GetBitWithIndex(ctrlDI[4], 2)
72 funcDI[14] = GetBitWithIndex(ctrlDI[4], 3)
73 funcDI[15] = GetBitWithIndex(ctrlDI[4], 4)
74 funcDI[16] = GetBitWithIndex(ctrlDI[4], 5)
75 SetRobotFuncDIState(funcDI)
76 local stopFlag = GetOpenLUAStopFlag(id)
77 if(stopFlag ~= 0) then
78 UnloadFieldBusSlave()
79 break
80 end
81 sleep_ms(10)
82end
Kliknij przycisk „Załaduj”, aby załadować tryb węzła podrzędnego robota.

Informacja
Po pomyślnym załadowaniu trybu węzła podrzędnego robota, obsługiwana jest funkcja automatycznego uruchamiania przy starcie. Aby użyć trybu zdalnego, należy najpierw odinstalować tryb węzła podrzędnego.
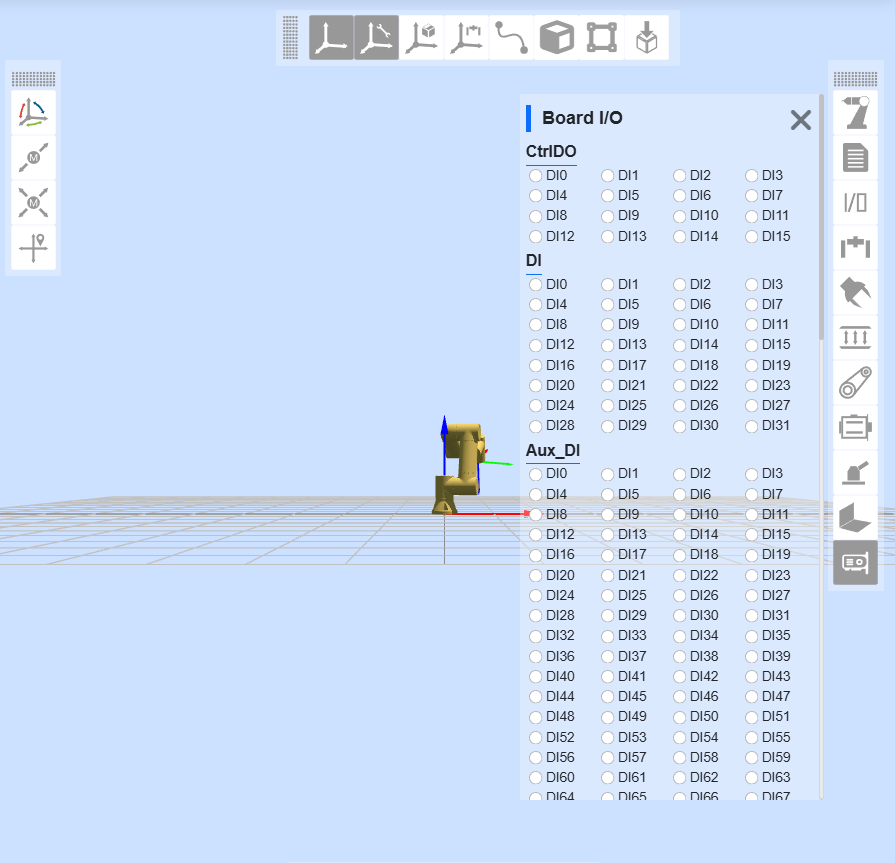
Kliknij przycisk paska stanu karty po prawej stronie, aby monitorować informacje o wymianie danych DI, DO, AI, AO. Opisy parametrów są następujące:
CtrlDO: Wartość wejściowa sygnału DO/CO skrzynki kontrolnej wysłana przez zewnętrznego mastera;
DI: Wartość wejściowa sygnału sterującego z zewnętrznego mastera;
Aux_DI: Rozszerzone DI karty komunikacyjnej;
DO: Wartość wyjściowa sygnału zwrotnego z węzła podrzędnego robota;
Aux_DO: Rozszerzone DO karty komunikacyjnej;
AI: Wartość wejściowa z zewnętrznego mastera;
AI0~AI15: typ int16;
AI16~AI31: typ float;
AO: Wartość wyjściowa z węzła podrzędnego robota;
AO0~AO15: typ int16;
AO16~AO31: typ float.
Informacja
Szczegółowe informacje o parametrach DI, DO, AI, AO można znaleźć w dokumencie „RD36-Tabela adresów trybu węzła podrzędnego robota-V1.0-20260605”.
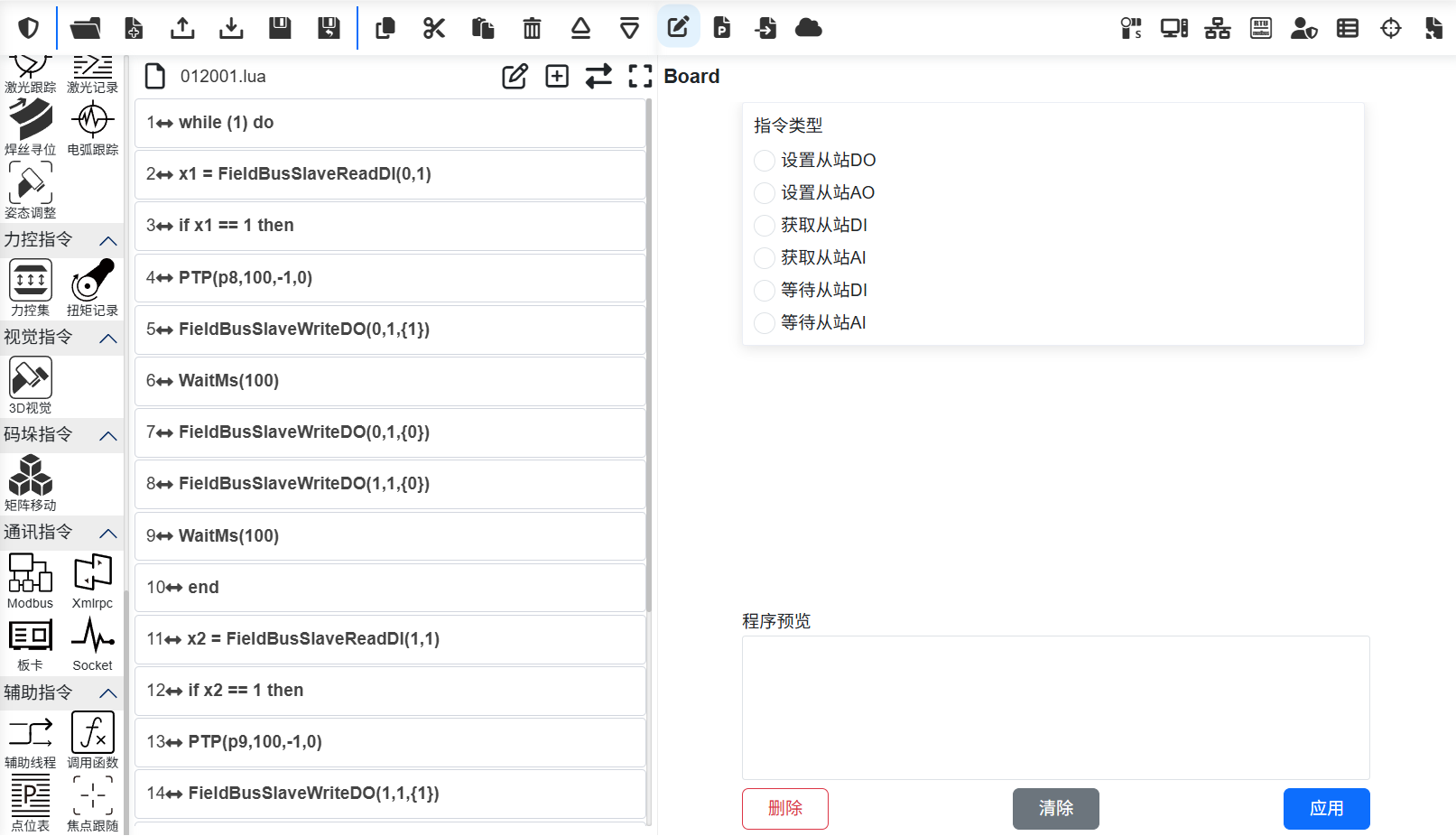
Po zakończeniu ładowania, poprzez program nauczania -> Instrukcje komunikacyjne -> Karta, można wygenerować instrukcje lua karty, umożliwiające ustawienie DO, AO węzła podrzędnego, pobranie DI, AI węzła podrzędnego oraz oczekiwanie na DI, AI węzła podrzędnego.
19.4. Aktualizacja firmware karty i konfiguracja cyklu komunikacyjnego
19.4.1. Karta FRJ-PCIeN-EIP/CC/PN-RJ-V10
Przy przełączaniu protokołu karty konieczna jest aktualizacja firmware. Aby zaktualizować firmware karty FRJ-PCIeN-EIP/CC/PN-RJ-V10 za pomocą komputera PC, wykonaj następujące kroki:
Otwórz WinPcap_4_1_3.exe, zainstaluj pakiet sterownika karty sieciowej.
Podłącz port sieciowy komputera PC (system Win11) bezpośrednio do portu sieciowego karty. Otwórz Device Assistant v1.1.0.exe, kliknij dwukrotnie „Ethernet”, kliknij przycisk „Odśwież” w lewym górnym rogu, aby zeskanować aktualnie podłączone urządzenie karty.
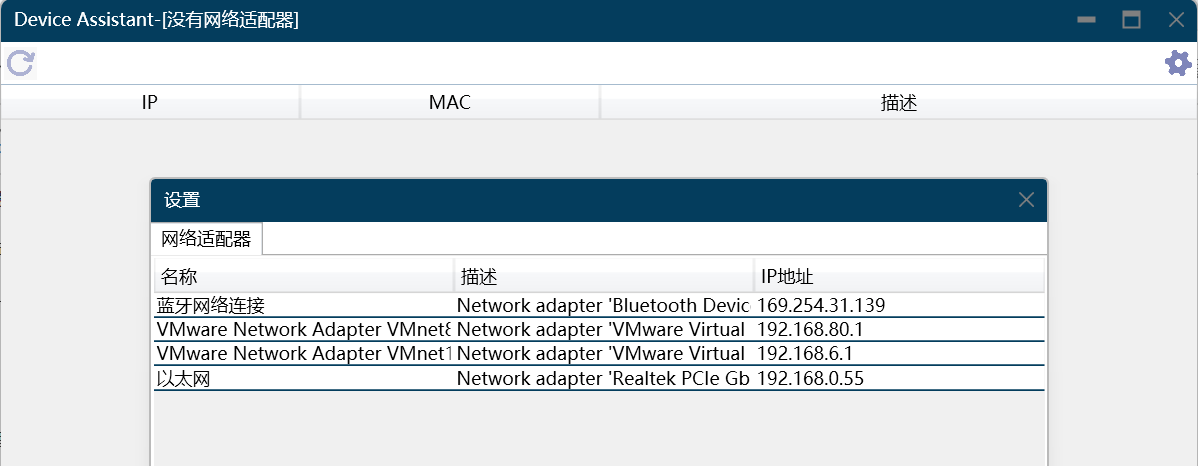
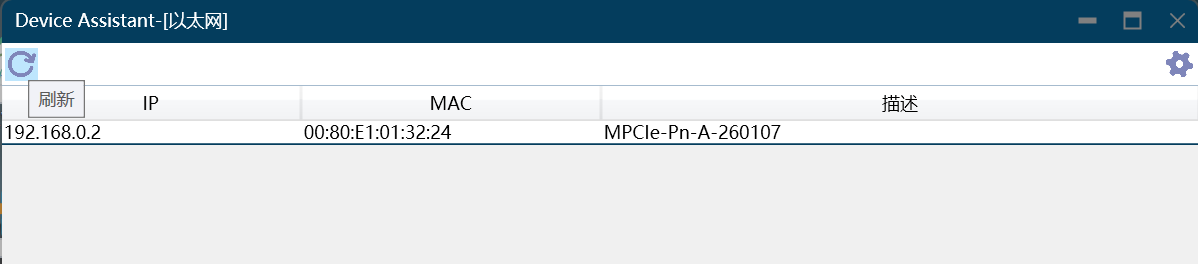
Kliknij dwukrotnie zeskanowane urządzenie karty, aby przejść do interfejsu aktualizacji firmware. Skonfiguruj adresy IP komputera PC i pobranej karty w tej samej podsieci. Kliknij przycisk „…” po prawej stronie menu „Aktualizacja firmware”, prześlij firmware do aktualizacji, kliknij przycisk „Aktualizuj”. Po pomyślnej aktualizacji, w polu tekstowym w lewym dolnym rogu pojawi się komunikat „Aktualizacja zakończona sukcesem”.
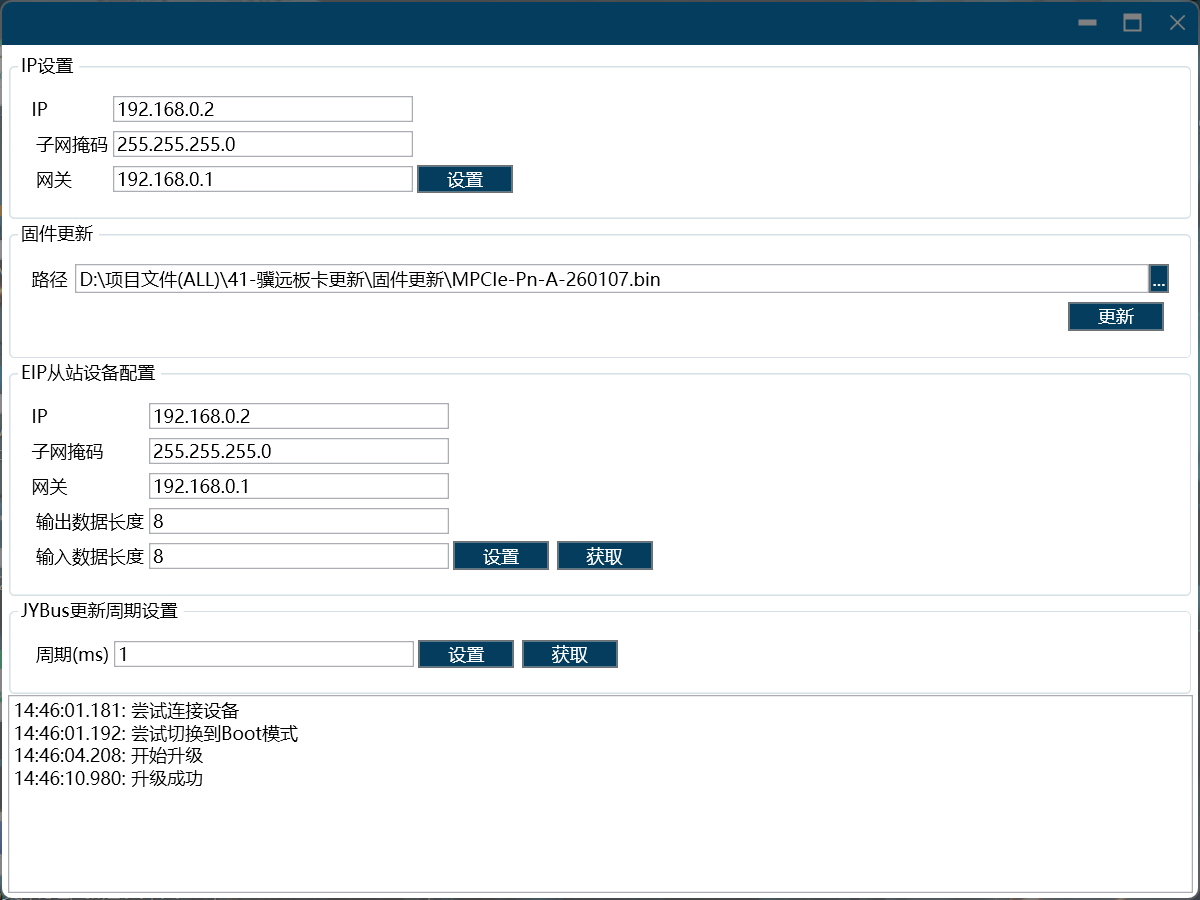
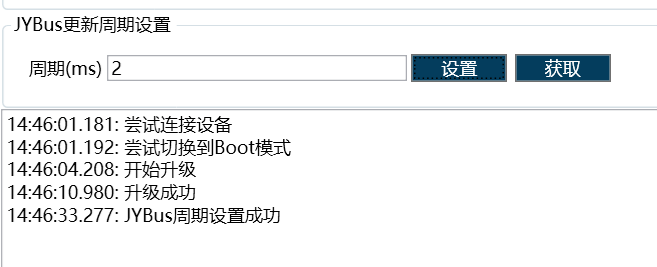
Po pomyślnej aktualizacji karta zostanie zresetowana. Poczekaj na zakończenie resetowania karty (5 s). Wprowadź żądany cykl komunikacyjny (obsługiwany 1~100 ms), kliknij przycisk „Ustaw”. Po wyświetleniu komunikatu „Ustawienie cyklu zakończone sukcesem” w lewym dolnym rogu, uruchom ponownie skrzynkę kontrolną.
19.4.2. Karta FRJ-PCIeN-EC/PN/EIP/CC-RJ-V20
Przy przełączaniu protokołu karty konieczna jest aktualizacja firmware. Zaloguj się do interfejsu robota, aby zaktualizować firmware karty FRJ-PCIeN-EC/PN/EIP/CC-RJ-V20, wykonując następujące kroki:
Wprowadź adres URL 192.168.58.2, aby przejść do interfejsu robota. Kliknij „Ustawienia początkowe” -> „Urządzenia peryferyjne” -> „Komunikacja z kartą”, aby uzyskać numer wersji firmware karty FRJ-PCIeN-EC/PN/EIP/CC-RJ-V20. Wybierz plik bin do aktualizacji, kliknij „Prześlij”. Po pomyślnej aktualizacji firmware uruchom ponownie skrzynkę kontrolną.

Informacja
Aby zaktualizować firmware karty FRJ-PCIeN-EC/PN/EIP/CC-RJ-V20, należy odinstalować działający protokół otwarty.
Wprowadź adres URL 192.168.58.2, aby przejść do interfejsu robota. Kliknij „Ustawienia początkowe” -> „Urządzenia peryferyjne” -> „Komunikacja z kartą”, aby uzyskać cykl komunikacyjny karty. Wprowadź żądany cykl komunikacyjny (1~100 ms), kliknij przycisk „Konfiguruj”. Po pomyślnej konfiguracji uruchom ponownie skrzynkę kontrolną.

Informacja
Aby skonfigurować cykl komunikacyjny karty FRJ-PCIeN-EC/PN/EIP/CC-RJ-V20, należy odinstalować działający protokół otwarty.