20. Dodatek
20.1. Dodatek 1: Błędy kontrolera ruchu i sposoby ich rozwiązywania
Główny kod błędu |
Podrzędny kod błędu |
Opis |
|---|---|---|
0-Brak błędu |
0 |
Brak błędu |
1-Błąd punktu docelowego |
1 |
Błąd punktu docelowego stawu, możliwy do zresetowania |
1-Błąd punktu docelowego |
2 |
Błąd punktu docelowego linii (w tym niezgodność narzędzia), możliwy do zresetowania |
1-Błąd punktu docelowego |
3 |
Błąd punktu pośredniego łuku (w tym niezgodność narzędzia), możliwy do zresetowania |
1-Błąd punktu docelowego |
4 |
Błąd punktu docelowego łuku (w tym niezgodność narzędzia), możliwy do zresetowania |
1-Błąd punktu docelowego |
5 |
Odstęp między punktami łuku jest zbyt mały, możliwy do zresetowania |
1-Błąd punktu docelowego |
6 |
Błąd punktu pośredniego 1 okręgu/linii śrubowej (w tym niezgodność narzędzia), możliwy do zresetowania |
1-Błąd punktu docelowego |
7 |
Błąd punktu pośredniego 2 okręgu/linii śrubowej (w tym niezgodność narzędzia), możliwy do zresetowania |
1-Błąd punktu docelowego |
8 |
Błąd punktu pośredniego 3 okręgu/linii śrubowej (w tym niezgodność narzędzia), możliwy do zresetowania |
1-Błąd punktu docelowego |
9 |
Odstęp między punktami okręgu/linii śrubowej jest zbyt mały, możliwy do zresetowania |
1-Błąd punktu docelowego |
10 |
Błąd punktu docelowego TPD, możliwy do zresetowania |
1-Błąd punktu docelowego |
11 |
Narzędzie w instrukcji TPD jest niezgodne z bieżącym narzędziem, możliwy do zresetowania |
1-Błąd punktu docelowego |
12 |
Odchylenie między bieżącą instrukcją TPD a punktem początkowym następnej instrukcji jest zbyt duże, możliwy do zresetowania |
1-Błąd punktu docelowego |
13 |
Błąd przełączania narzędzia wewnętrznego/zewnętrznego, możliwy do zresetowania |
1-Błąd punktu docelowego |
14 |
Błąd punktu początkowego nowej linii śrubowej, możliwy do zresetowania |
1-Błąd punktu docelowego |
15 |
Błąd punktu docelowego nowej krzywej średniej, możliwy do zresetowania |
1-Błąd punktu docelowego |
17 |
Przekroczenie limitu instrukcji stawu PTP, możliwy do zresetowania |
1-Błąd punktu docelowego |
18 |
Przekroczenie limitu instrukcji stawu TPD, możliwy do zresetowania |
1-Błąd punktu docelowego |
19 |
Przekroczenie limitu instrukcji stawu LIN/ARC, możliwy do zresetowania |
1-Błąd punktu docelowego |
20 |
Przekroczenie prędkości w przestrzeni kartezjańskiej, niemożliwy do zresetowania |
1-Błąd punktu docelowego |
21 |
Przekroczenie limitu momentu obrotowego w przestrzeni stawów, możliwy do zresetowania |
1-Błąd punktu docelowego |
22 |
Przekroczenie limitu instrukcji stawu JOG, możliwy do zresetowania |
1-Błąd punktu docelowego |
23 |
Przekroczenie limitu prędkości instrukcji w przestrzeni stawu dla osi 1, możliwy do zresetowania |
1-Błąd punktu docelowego |
24 |
Przekroczenie limitu prędkości instrukcji w przestrzeni stawu dla osi 2, możliwy do zresetowania |
1-Błąd punktu docelowego |
25 |
Przekroczenie limitu prędkości instrukcji w przestrzeni stawu dla osi 3, możliwy do zresetowania |
1-Błąd punktu docelowego |
26 |
Przekroczenie limitu prędkości instrukcji w przestrzeni stawu dla osi 4, możliwy do zresetowania |
1-Błąd punktu docelowego |
27 |
Przekroczenie limitu prędkości instrukcji w przestrzeni stawu dla osi 5, możliwy do zresetowania |
1-Błąd punktu docelowego |
28 |
Przekroczenie limitu prędkości instrukcji w przestrzeni stawu dla osi 6, możliwy do zresetowania |
1-Błąd punktu docelowego |
29 |
Przekroczenie limitu prędkości sprzężenia zwrotnego stawu, niemożliwy do zresetowania |
1-Błąd punktu docelowego |
30 |
Zbyt duże odchylenie między instrukcją a sprzężeniem zwrotnym stawu, niemożliwy do zresetowania, wymagany restart |
1-Błąd punktu docelowego |
31 |
Błąd punktu docelowego DMP (w tym niezgodność narzędzia), możliwy do zresetowania |
1-Błąd punktu docelowego |
33 |
Zmiana konfiguracji stawu w następnej instrukcji (następna instrukcja ma osobliwą pozycję, użyj instrukcji PTP lub zmień następny punkt docelowy), możliwy do zresetowania |
1-Błąd punktu docelowego |
34 |
Zmiana konfiguracji stawu w bieżącej instrukcji (następna instrukcja ma osobliwą pozycję, użyj instrukcji PTP lub zmień następny punkt docelowy), możliwy do zresetowania |
1-Błąd punktu docelowego |
35 |
Przekroczenie limitu prędkości stawu w instrukcji LIN, możliwy do zresetowania |
1-Błąd punktu docelowego |
36 |
Przekroczenie progu prędkości adaptacyjnej w instrukcji LIN, możliwy do zresetowania |
1-Błąd punktu docelowego |
37 |
Nieosiągalny punkt w trajektorii, możliwy do zresetowania |
1-Błąd punktu docelowego |
38 |
Nieosiągalny punkt w trajektorii - osobliwa pozycja, możliwy do zresetowania |
1-Błąd punktu docelowego |
49 |
Błąd instrukcji, pomiędzy ARCSTART i ARCEND dozwolone są tylko instrukcje LIN i ARC, możliwy do zresetowania |
1-Błąd punktu docelowego |
50 |
Błąd instrukcji, pomiędzy WEAVESTART i WEAVEEND dozwolone są tylko instrukcje LIN i ARC, możliwy do zresetowania |
1-Błąd punktu docelowego |
51 |
Błąd parametrów spawania z oscylacją, możliwy do zresetowania |
1-Błąd punktu docelowego |
52 |
Odstęp między punktami spawania z oscylacją jest zbyt mały, możliwy do zresetowania |
1-Błąd punktu docelowego |
53 |
Nieosiągalny punkt w trajektorii oscylacji - osobliwa pozycja, możliwy do zresetowania |
1-Błąd punktu docelowego |
54 |
Nieosiągalny punkt w trajektorii oscylacji - przekroczenie limitu instrukcji stawu, możliwy do zresetowania |
1-Błąd punktu docelowego |
55 |
Nieosiągalny punkt w trajektorii oscylacji - błąd planowania (zgodność kierunku Z narzędzia z kierunkiem X ruchu do przodu), możliwy do zresetowania |
1-Błąd punktu docelowego |
56 |
Nieosiągalny punkt w trajektorii oscylacji - błąd punktu pośredniego łuku, możliwy do zresetowania |
1-Błąd punktu docelowego |
65 |
Zbyt duże odchylenie instrukcji czujnika laserowego, możliwy do zresetowania |
1-Błąd punktu docelowego |
66 |
Przerwanie instrukcji czujnika laserowego, przedwczesne zakończenie śledzenia spoiny, możliwy do zresetowania |
1-Błąd punktu docelowego |
81 |
Przekroczenie limitu prędkości instrukcji zewnętrznej osi, możliwy do zresetowania |
1-Błąd punktu docelowego |
82 |
Zbyt duże odchylenie między instrukcją a sprzężeniem zwrotnym zewnętrznej osi, niemożliwy do zresetowania, wymagany powrót do zera lub restart |
1-Błąd punktu docelowego |
83 |
Nieprawidłowa komunikacja z rozszerzonym urządzeniem peryferyjnym (zewnętrzna oś/IO), możliwy do zresetowania |
1-Błąd punktu docelowego |
84 |
Nieprawidłowa utrata pakietów w komunikacji z rozszerzonym urządzeniem peryferyjnym (zewnętrzna oś/IO), możliwy do zresetowania |
1-Błąd punktu docelowego |
97 |
Śledzenie taśmociągu - zbyt duża zmiana orientacji między punktem początkowym a punktem odniesienia, możliwy do zresetowania |
1-Błąd punktu docelowego |
113 |
Sterowanie stałą siłą - przekroczenie maksymalnej odległości regulacji w kierunku X, możliwy do zresetowania |
1-Błąd punktu docelowego |
114 |
Sterowanie stałą siłą - przekroczenie maksymalnej odległości regulacji w kierunku Y, możliwy do zresetowania |
1-Błąd punktu docelowego |
115 |
Sterowanie stałą siłą - przekroczenie maksymalnej odległości regulacji w kierunku Z, możliwy do zresetowania |
1-Błąd punktu docelowego |
116 |
Sterowanie stałą siłą - przekroczenie maksymalnego kąta regulacji w kierunku RX, możliwy do zresetowania |
1-Błąd punktu docelowego |
117 |
Sterowanie stałą siłą - przekroczenie maksymalnego kąta regulacji w kierunku RY, możliwy do zresetowania |
1-Błąd punktu docelowego |
118 |
Sterowanie stałą siłą - przekroczenie maksymalnego kąta regulacji w kierunku RZ, możliwy do zresetowania |
1-Błąd punktu docelowego |
119 |
Błąd danych zewnętrznego czujnika, możliwy do zresetowania |
1-Błąd punktu docelowego |
120 |
Nieudana próba ruchu eksploracyjnego po linii śrubowej, możliwy do zresetowania |
1-Błąd punktu docelowego |
121 |
Nieudany ruch obrotowy z wsuwaniem, możliwy do zresetowania |
1-Błąd punktu docelowego |
122 |
Nieudany ruch liniowy z wsuwaniem, możliwy do zresetowania |
1-Błąd punktu docelowego |
123 |
Nieudany ruch lokalizacji powierzchni, możliwy do zresetowania |
1-Błąd punktu docelowego |
129 |
Przekroczenie maksymalnej liczby punktów rejestracji momentu obrotowego, możliwy do zresetowania |
1-Błąd punktu docelowego |
130 |
Błąd przełączania prędkości, możliwy do zresetowania |
1-Błąd punktu docelowego |
147 |
Błąd śledzenia ogniska, możliwy do zresetowania |
1-Błąd punktu docelowego |
148 |
Przekroczenie limitu prędkości orientacji, możliwy do zresetowania |
1-Błąd punktu docelowego |
149 |
Nieprawidłowe sprzężenie zwrotne słowa stanu stawu, możliwy do zresetowania |
2-Awaria napędu |
1 |
Awaria napędu osi 1, niemożliwy do zresetowania |
2-Awaria napędu |
2 |
Awaria napędu osi 2, niemożliwy do zresetowania |
2-Awaria napędu |
3 |
Awaria napędu osi 3, niemożliwy do zresetowania |
2-Awaria napędu |
4 |
Awaria napędu osi 4, niemożliwy do zresetowania |
2-Awaria napędu |
5 |
Awaria napędu osi 5, niemożliwy do zresetowania |
2-Awaria napędu |
6 |
Awaria napędu osi 6, niemożliwy do zresetowania |
3-Błąd przekroczenia miękkiego limitu |
1 |
Błąd przekroczenia miękkiego limitu osi 1, możliwy do zresetowania |
3-Błąd przekroczenia miękkiego limitu |
2 |
Błąd przekroczenia miękkiego limitu osi 2, możliwy do zresetowania |
3-Błąd przekroczenia miękkiego limitu |
3 |
Błąd przekroczenia miękkiego limitu osi 3, możliwy do zresetowania |
3-Błąd przekroczenia miękkiego limitu |
4 |
Błąd przekroczenia miękkiego limitu osi 4, możliwy do zresetowania |
3-Błąd przekroczenia miękkiego limitu |
5 |
Błąd przekroczenia miękkiego limitu osi 5, możliwy do zresetowania |
3-Błąd przekroczenia miękkiego limitu |
6 |
Błąd przekroczenia miękkiego limitu osi 6, możliwy do zresetowania |
4-Błąd kolizji |
1 |
Błąd kolizji osi 1, możliwy do zresetowania |
4-Błąd kolizji |
2 |
Błąd kolizji osi 2, możliwy do zresetowania |
4-Błąd kolizji |
3 |
Błąd kolizji osi 3, możliwy do zresetowania |
4-Błąd kolizji |
4 |
Błąd kolizji osi 4, możliwy do zresetowania |
4-Błąd kolizji |
5 |
Błąd kolizji osi 5, możliwy do zresetowania |
4-Błąd kolizji |
6 |
Błąd kolizji osi 6, możliwy do zresetowania |
4-Błąd kolizji |
7 |
Błąd kolizji końcówki, możliwy do zresetowania |
5-Błąd liczby aktywnych stacji podrzędnych |
1 |
Błąd liczby aktywnych stacji podrzędnych, niemożliwy do zresetowania |
6-Błąd stacji podrzędnej |
1 |
Utrata połączenia ze stacją podrzędną, niemożliwy do zresetowania |
6-Błąd stacji podrzędnej |
2 |
Stan stacji podrzędnej niezgodny z ustawioną wartością, niemożliwy do zresetowania |
6-Błąd stacji podrzędnej |
3 |
Stacja podrzędna nie skonfigurowana, niemożliwy do zresetowania |
6-Błąd stacji podrzędnej |
4 |
Błąd konfiguracji stacji podrzędnej, niemożliwy do zresetowania |
6-Błąd stacji podrzędnej |
5 |
Błąd inicjalizacji stacji podrzędnej, niemożliwy do zresetowania |
6-Błąd stacji podrzędnej |
6 |
Błąd inicjalizacji komunikacji e-mail stacji podrzędnej, niemożliwy do zresetowania |
7-Błąd IO |
1 |
Błąd kanału, możliwy do zresetowania |
7-Błąd IO |
2 |
Błąd wartości, możliwy do zresetowania |
7-Błąd IO |
3 |
Przekroczenie czasu oczekiwania WaitDI, możliwy do zresetowania |
7-Błąd IO |
4 |
Przekroczenie czasu oczekiwania WaitAI, możliwy do zresetowania |
7-Błąd IO |
5 |
Przekroczenie czasu oczekiwania WaitAxleDI, możliwy do zresetowania |
7-Błąd IO |
6 |
Przekroczenie czasu oczekiwania WaitAxleAI, możliwy do zresetowania |
7-Błąd IO |
7 |
Błąd funkcji skonfigurowanej dla kanału, możliwy do zresetowania |
7-Błąd IO |
8 |
Przekroczenie czasu łuku początkowego, możliwy do zresetowania |
7-Błąd IO |
9 |
Przekroczenie czasu łuku końcowego, możliwy do zresetowania |
7-Błąd IO |
10 |
Przekroczenie czasu poszukiwania pozycji, możliwy do zresetowania |
7-Błąd IO |
11 |
Przekroczenie czasu wykrywania IO taśmociągu, możliwy do zresetowania |
7-Błąd IO |
12 |
Przekroczenie czasu oczekiwania WaitAuxDI, możliwy do zresetowania |
7-Błąd IO |
13 |
Przekroczenie czasu oczekiwania WaitAuxAI, możliwy do zresetowania |
7-Błąd IO |
14 |
Przekroczenie czasu poszukiwania pozycji drutu spawalniczego, możliwy do zresetowania |
8-Błąd chwytaka |
1 |
Błąd przekroczenia czasu ruchu chwytaka, możliwy do zresetowania |
9-Błąd pliku |
1 |
Błąd wersji pliku konfiguracyjnego zbt, błąd inicjalizacji - niemożliwy do zresetowania |
9-Błąd pliku |
2 |
Nieudane ładowanie pliku konfiguracyjnego zbt, błąd inicjalizacji - niemożliwy do zresetowania |
9-Błąd pliku |
3 |
Błąd wersji pliku konfiguracyjnego user, błąd inicjalizacji - niemożliwy do zresetowania |
9-Błąd pliku |
4 |
Nieudane ładowanie pliku konfiguracyjnego user, błąd inicjalizacji - niemożliwy do zresetowania |
9-Błąd pliku |
5 |
Błąd wersji pliku konfiguracyjnego exaxis, błąd inicjalizacji - niemożliwy do zresetowania |
9-Błąd pliku |
6 |
Nieudane ładowanie pliku konfiguracyjnego exaxis, błąd inicjalizacji - niemożliwy do zresetowania |
9-Błąd pliku |
7 |
Niezgodność modelu robota, wymagane ponowne ustawienie - niemożliwy do zresetowania |
9-Błąd pliku |
8 |
Błąd wersji pliku konfiguracyjnego dhpara, błąd inicjalizacji - niemożliwy do zresetowania |
9-Błąd pliku |
9 |
Nieudane ładowanie pliku konfiguracyjnego dhpara, błąd inicjalizacji - niemożliwy do zresetowania |
9-Błąd pliku |
10 |
Model robota nie ustawiony - niemożliwy do zresetowania |
9-Błąd pliku |
11 |
Błąd wersji pliku konfiguracyjnego load, błąd inicjalizacji - niemożliwy do zresetowania |
9-Błąd pliku |
12 |
Nieudane ładowanie pliku konfiguracyjnego load, błąd inicjalizacji - niemożliwy do zresetowania |
9-Błąd pliku |
13 |
Błąd wersji pliku konfiguracyjnego speed, błąd inicjalizacji - niemożliwy do zresetowania |
9-Błąd pliku |
14 |
Nieudane ładowanie pliku konfiguracyjnego speed, błąd inicjalizacji - niemożliwy do zresetowania |
10-Osobliwa pozycja |
1 |
Osobliwa pozycja |
11-Błąd komunikacji z napędem |
1 |
Błąd komunikacji z napędem osi 1, niemożliwy do zresetowania |
11-Błąd komunikacji z napędem |
2 |
Błąd komunikacji z napędem osi 2, niemożliwy do zresetowania |
11-Błąd komunikacji z napędem |
3 |
Błąd komunikacji z napędem osi 3, niemożliwy do zresetowania |
11-Błąd komunikacji z napędem |
4 |
Błąd komunikacji z napędem osi 4, niemożliwy do zresetowania |
11-Błąd komunikacji z napędem |
5 |
Błąd komunikacji z napędem osi 5, niemożliwy do zresetowania |
11-Błąd komunikacji z napędem |
6 |
Błąd komunikacji z napędem osi 6, niemożliwy do zresetowania |
12-Miękki limit zewnętrznej osi |
1 |
Przekroczenie miękkiego limitu osi 1, możliwy do zresetowania |
12-Miękki limit zewnętrznej osi |
2 |
Przekroczenie miękkiego limitu osi 2, możliwy do zresetowania |
12-Miękki limit zewnętrznej osi |
3 |
Przekroczenie miękkiego limitu osi 3, możliwy do zresetowania |
12-Miękki limit zewnętrznej osi |
4 |
Przekroczenie miękkiego limitu osi 4, możliwy do zresetowania |
13-Błąd parametrów ustawienia |
1 |
Przekroczenie limitu numeru narzędzia, możliwy do zresetowania |
13-Błąd parametrów ustawienia |
2 |
Błąd progu ukończenia pozycjonowania, możliwy do zresetowania |
13-Błąd parametrów ustawienia |
3 |
Błąd poziomu kolizji, możliwy do zresetowania |
13-Błąd parametrów ustawienia |
4 |
Błąd masy ładunku, możliwy do zresetowania |
13-Błąd parametrów ustawienia |
5 |
Błąd X środka ciężkości ładunku, możliwy do zresetowania |
13-Błąd parametrów ustawienia |
6 |
Błąd Y środka ciężkości ładunku, możliwy do zresetowania |
13-Błąd parametrów ustawienia |
7 |
Błąd Z środka ciężkości ładunku, możliwy do zresetowania |
13-Błąd parametrów ustawienia |
8 |
Błąd czasu filtrowania DI, możliwy do zresetowania |
13-Błąd parametrów ustawienia |
9 |
Błąd czasu filtrowania AxleDI, możliwy do zresetowania |
13-Błąd parametrów ustawienia |
10 |
Błąd czasu filtrowania AI, możliwy do zresetowania |
13-Błąd parametrów ustawienia |
11 |
Błąd czasu filtrowania AxleAI, możliwy do zresetowania |
13-Błąd parametrów ustawienia |
12 |
Błąd zakresu wysokiego/niskiego poziomu DI, możliwy do zresetowania |
13-Błąd parametrów ustawienia |
13 |
Błąd zakresu wysokiego/niskiego poziomu DO, możliwy do zresetowania |
13-Błąd parametrów ustawienia |
14 |
Przekroczenie limitu numeru przedmiotu, możliwy do zresetowania |
13-Błąd parametrów ustawienia |
15 |
Przekroczenie limitu numeru zewnętrznej osi, możliwy do zresetowania |
13-Błąd parametrów ustawienia |
16 |
Błąd kanału enkodera taśmociągu, możliwy do zresetowania |
13-Błąd parametrów ustawienia |
17 |
Błąd numeru osi przedmiotu taśmociągu, możliwy do zresetowania |
20.2. Dodatek 2: Tabela kodów awarii serwonapędu
Kod awarii |
Nazwa awarii |
Sposób rozwiązania |
1 |
Awaria przetężenia programowego |
1. Sprawdź, czy obciążenie lub opór stawu nie wzrosły lub nie są nieprawidłowe
2. Jeśli awaria nie zostanie usunięta, napraw lub wymień płytę sterującą napędu
|
2 |
Awaria przepięcia |
Zmniejsz prędkość lub przyspieszenie robota |
3 |
Awaria napięcia |
1. Sprawdź, czy napięcie wyjściowe zasilacza 48V w skrzynce sterowniczej jest nieprawidłowe
2. Sprawdź, czy płyta sterująca napędu i obudowa stawu nie są zwarte
3. Jeśli awaria nie zostanie usunięta, napraw lub wymień płytę sterującą napędu
|
4 |
Awaria przegrzania |
Zmniejsz obciążenie robota lub zmniejsz prędkość robota |
5 |
Awaria przeciążenia |
Zmniejsz obciążenie robota lub zmniejsz prędkość robota |
6 |
Awaria nadmiernej prędkości |
1. Sprawdź, czy śruba ustalająca między zespołem enkodera magnetycznego a wałem silnika nie jest poluzowana
2. Wykonaj ponownie zerowanie enkodera
3. Jeśli awaria nie zostanie usunięta, napraw lub wymień zespół enkodera magnetycznego
|
7 |
Awaria nieprawidłowego parametru |
Napraw lub wymień płytę sterującą napędu |
8 |
Awaria „lotu” (niekontrolowany ruch) |
1. Sprawdź, czy śruba ustalająca między zespołem enkodera magnetycznego a wałem silnika nie jest poluzowana
2. Wykonaj ponownie zerowanie enkodera
3. Jeśli awaria nie zostanie usunięta, napraw lub wymień zespół enkodera magnetycznego
|
9 |
Awaria błędu pozycji |
1. Sprawdź, czy obciążenie lub opór stawu nie wzrosły lub nie są nieprawidłowe
2. Jeśli awaria nie zostanie usunięta, napraw lub wymień płytę sterującą napędu
|
10 |
Awaria przepełnienia pozycji |
1. Sprawdź, czy twardy ogranicznik nie jest poluzowany
2. Wykonaj ponownie zerowanie robota
|
11 |
Awaria przetężenia sprzętowego |
Napraw lub wymień płytę sterującą napędu |
12 |
Awaria blokady napędu |
Nieaktywowane |
13 |
Awaria blokowania silnika |
1. Sprawdź, czy elektromagnes hamulca jest zaciągnięty
2. Sprawdź, czy nie uderzono w twardy ogranicznik
3. Jeśli awaria nie zostanie usunięta, napraw lub wymień płytę sterującą napędu
|
14 |
Awaria zasilania mocy |
Nieaktywowane |
15 |
Awaria STO |
Nieaktywowane |
16 |
Awaria zerowania AD prądu fazowego |
Napraw lub wymień płytę sterującą napędu |
17 |
Awaria EEPROM |
Napraw lub wymień płytę sterującą napędu |
18 |
Awaria Halla |
1. Sprawdź, czy wiązka Halla jest dobrze podłączona, czy nie ma zwarcia lub przerwy
2. Jeśli awaria nie zostanie usunięta, napraw lub wymień staw
|
19 |
Awaria enkodera |
Napraw lub wymień zespół enkodera magnetycznego |
20 |
Awaria zerowania enkodera |
1. Wykonaj ponownie zerowanie enkodera
2. Jeśli awaria nie zostanie usunięta, napraw lub wymień zespół enkodera magnetycznego
|
21 |
Awaria utraty sygnału Z enkodera |
Nieaktywowane |
22 |
Awaria zliczania enkodera |
Nieaktywowane |
23 |
Awaria przepełnienia danych wieloobrotowych enkodera |
Nieaktywowane |
24 |
Awaria zegara zewnętrznego |
Napraw lub wymień płytę sterującą napędu |
25 |
Awaria sekwencji faz UVW |
Nieaktywowane |
26 |
Awaria FPGA |
Nieaktywowane |
27 |
Awaria powrotu do zera |
Nieaktywowane |
28 |
Awaria enkodera magnetycznego |
1. Sprawdź, czy śruba ustalająca między zespołem enkodera magnetycznego a wałem silnika nie jest poluzowana
2. Jeśli awaria nie zostanie usunięta, napraw lub wymień zespół enkodera magnetycznego
|
29 |
Awaria przerwy w przewodzie zasilania silnika |
1. Sprawdź, czy przewód zasilania silnika jest dobrze podłączony, czy nie ma zwarcia lub przerwy
2. Jeśli awaria nie zostanie usunięta, napraw lub wymień płytę sterującą napędu
|
30 |
Awaria EtherCAT |
1. Sprawdź, czy kabel sieciowy jest dobrze podłączony, czy nie ma zwarcia lub przerwy
2. Jeśli awaria nie zostanie usunięta, napraw lub wymień płytę sterującą napędu
|
31 |
Awaria EtherCAT_SM_DOG |
1. Sprawdź, czy kabel sieciowy jest dobrze podłączony, czy nie ma zwarcia lub przerwy
2. Jeśli awaria nie zostanie usunięta, napraw lub wymień płytę sterującą napędu
|
32 |
Awaria EtherCAT_FATALSYNC |
1. Sprawdź, czy kabel sieciowy jest dobrze podłączony, czy nie ma zwarcia lub przerwy
2. Jeśli awaria nie zostanie usunięta, napraw lub wymień płytę sterującą napędu
|
33 |
Awaria EtherCAT_SYNC |
1. Sprawdź, czy kabel sieciowy jest dobrze podłączony, czy nie ma zwarcia lub przerwy
2. Jeśli awaria nie zostanie usunięta, napraw lub wymień płytę sterującą napędu
|
34 |
Awaria EtherCAT_RFT |
1. Sprawdź, czy kabel sieciowy jest dobrze podłączony, czy nie ma zwarcia lub przerwy
2. Jeśli awaria nie zostanie usunięta, napraw lub wymień płytę sterującą napędu
|
35 |
Awaria adresu osi napędu |
1. Wykonaj ponownie konfigurację adresu osi napędu
2. Jeśli awaria nie zostanie usunięta, napraw lub wymień płytę sterującą napędu
|
36 |
Awaria zerowania robota |
1. Wykonaj ponownie zerowanie robota
2. Najpierw użyj JLINK, aby wymazać FLASH, a następnie pobierz ponownie program i wykonaj zerowanie
3. Jeśli awaria nie zostanie usunięta, napraw lub wymień płytę sterującą napędu
|
37 |
Awaria komunikacji enkodera |
1. Sprawdź, czy wiązka enkodera jest dobrze podłączona, czy nie ma zwarcia lub przerwy
2. Jeśli awaria nie zostanie usunięta, napraw lub wymień zespół enkodera magnetycznego
|
40 |
Awaria modułu enkodera magnetycznego - błąd zerowania |
1. Wykonaj ponownie zerowanie zespołu enkodera magnetycznego
2. Jeśli awaria nie zostanie usunięta, napraw lub wymień zespół enkodera magnetycznego
|
41 |
Awaria modułu enkodera magnetycznego - błąd wieloobrotowy |
1. Sprawdź, czy śruba ustalająca między zespołem enkodera magnetycznego a wałem silnika nie jest poluzowana
2. Jeśli awaria nie zostanie usunięta, napraw lub wymień zespół enkodera magnetycznego
|
42 |
Awaria modułu enkodera magnetycznego - awaria małego enkodera wieloobrotowego |
1. Sprawdź, czy układ małego enkodera wieloobrotowego nie jest nieprawidłowy
2. Jeśli awaria nie zostanie usunięta, napraw lub wymień zespół enkodera magnetycznego
|
43 |
Awaria modułu enkodera magnetycznego - awaria dużego enkodera wieloobrotowego |
1. Sprawdź, czy układ dużego enkodera wieloobrotowego nie jest nieprawidłowy
2. Jeśli awaria nie zostanie usunięta, napraw lub wymień zespół enkodera magnetycznego
|
44 |
Awaria modułu enkodera magnetycznego - awaria enkodera pojedynczego obrotu |
1. Sprawdź, czy układ enkodera pojedynczego obrotu nie jest nieprawidłowy
2. Jeśli awaria nie zostanie usunięta, napraw lub wymień zespół enkodera magnetycznego
|
45 |
Awaria modułu enkodera magnetycznego - awaria enkodera optycznego |
1. Sprawdź, czy tarcza enkodera optycznego nie jest zabrudzona lub źle przyklejona
2. Jeśli awaria nie zostanie usunięta, napraw lub wymień zespół enkodera magnetycznego
|
20.3. Dodatek 3: Aktualizacja 485 płyty końcowej
Podczas użytkowania w terenie może zaistnieć konieczność aktualizacji oprogramowania sprzętowego w celu spełnienia nowych wymagań. Dostarczony zostanie nowy plik aktualizacji (XX_XX_MAIN.bin). Aktualizacja płyty końcowej odbywa się przez interfejs 485 (wymagany jest moduł USB na 485). Kroki aktualizacji są następujące:
Krok 1: Podłączenie 485, Na końcu robota znajduje się 5-stykowe złącze komunikacyjne typu lotniczego. Rozmieszczenie pinów złącza lotniczego oraz opis pinów przedstawiono na Wykresie 1. Podłącz 485-A i 485-B na końcu robota odpowiednio do A i B narzędzia USB-485 za pomocą skrętki.
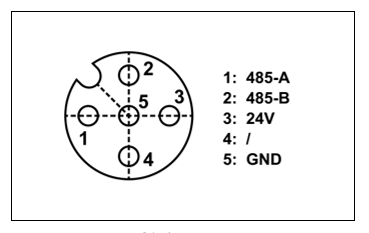
Wykres 18.3-1 Rozmieszczenie pinów złącza lotniczego
Krok 2: Połączenie sprzętowe, Podłącz końcówkę USB narzędzia USB-485 do komputera PC. W Menedżerze urządzeń komputera PC, jeśli narzędzie USB-485 zostanie rozpoznane, pojawi się następujący interfejs.
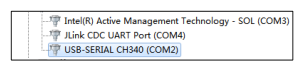
Wykres 18.3-2 Opis rozpoznawania portu USB-485
Krok 3: Narzędzie do aktualizacji, Po zakończeniu podłączania otwórz „Asystenta portu szeregowego FAIRINO”, kliknij przycisk „Płyta końcowa”, w funkcji „Ustawienia parametrów portu szeregowego” wybierz rozpoznany powyżej port szeregowy, prędkość 115200, 8 bitów danych, brak bitu parzystości, 1 bit stopu, a następnie otwórz port szeregowy. Po pomyślnym wykonaniu pojawi się komunikat „Port szeregowy otwarty pomyślnie”.
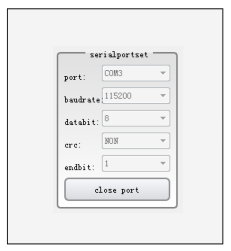
Wykres 18.3-3 Ustawienia parametrów portu szeregowego
Krok 4: Aktualizacja oprogramowania sprzętowego, Wybierz „Płyta końcowa”, kliknij „Aktualizacja oprogramowania sprzętowego”, jak pokazano na wykresie:
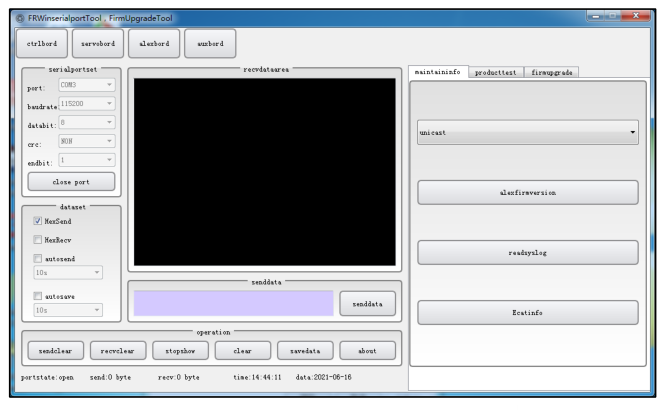
Wykres 18.3-4 Aktualizacja oprogramowania sprzętowego płyty końcowej
Najpierw kliknij „Flash擦除” (Kasowanie Flash). Po pomyślnym skasowaniu, w obszarze odbierania danych pojawi się komunikat o pomyślnym skasowaniu.
Otwórz plik (plik do aktualizacji), wybierz ścieżkę przechowywania, jak poniżej. Po wybraniu nazwa pliku do aktualizacji pojawi się w polu wyświetlania nazwy pliku.
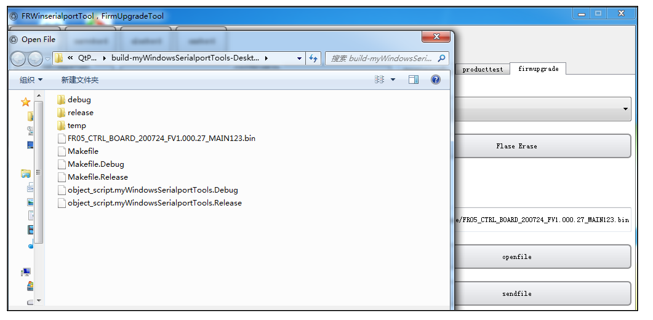
Wykres 18.3-5 Wybór pliku aktualizacji
Kliknij „发送文件” (Wyślij plik). Gdy pasek postępu wskaże 100%, oznacza to, że wysyłanie pliku aktualizacji zostało zakończone.
Krok 5: Weryfikacja aktualizacji, Uruchom ponownie system. W zakładce „Informacje konserwacyjne” wybierz „Zapytaj o wersję oprogramowania sprzętowego płyty końcowej”. W „Obszarze odbierania danych” wyświetli się informacja o wersji oprogramowania sprzętowego. Jeśli jest zgodna z wersją pliku aktualizacji, aktualizacja powiodła się. W przeciwnym razie aktualizacja nie powiodła się.
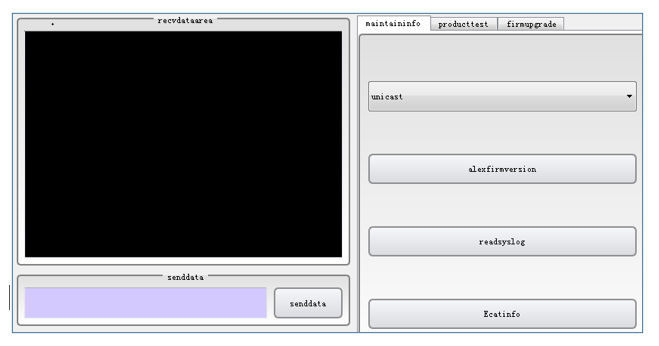
Wykres 18.3-6 Zapytanie o wersję oprogramowania sprzętowego
20.4. Dodatek 4: Aktualizacja 485 skrzynki sterowniczej
W skrzynce sterowniczej robota znajduje się interfejs „Zasilanie i komunikacja”. Podłącz odpowiednio A i B narzędzia USB-485 do „485-A” i „485-B” tego interfejsu.
Proces aktualizacji jest taki sam jak w przypadku płyty końcowej, należy odpowiednio wybrać oprogramowanie. Nie będzie to tutaj powtarzane.
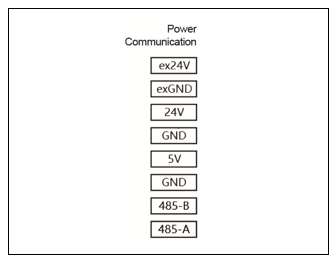
Wykres 18.4-1 Interfejs zasilania i komunikacji
20.5. Dodatek 5: Lista części zamiennych i części zużywających się
Część |
Numer |
Ilość |
Śruba M8*30 |
4.0.08.2006185 |
4 |
Sworzeń cylindryczny typ A 8*20 |
4.5.00.2013076 |
2 |
Bezpiecznik 5x20 6A |
1 |