4. Szybkie uruchamianie robota
4.1. Instalacja ramienia robota i skrzynki sterowniczej
Zgodnie z rozdziałem 3.5 i 3.6 w 3. Instalacja sprzętowa, zainstaluj i podłącz ramię robota oraz skrzynkę sterowniczą.
Wyjmij ramię robota z opakowania, zamontuj ramię robota za pomocą 4 śrub M8 o klasie wytrzymałości nie niższej niż 8.8. Zamontuj ramię robota na solidnej i odpornej na wibracje powierzchni. Jeśli mocujesz do płyty aluminiowej, jej grubość nie może być mniejsza niż 16 mm; jeśli do płyty stalowej, jej grubość nie może być mniejsza niż 8 mm.
Umieść skrzynkę sterowniczą na jej stopkach.
Podłącz kabel zasilający głównego ramienia robota do złącza zasilania głównego skrzynki sterowniczej.
Podłącz wtyczkę lotniczą panelu przyciskowego do złącza panelu operatorskiego skrzynki sterowniczej.
Upewnij się, że przycisk zasilania skrzynki sterowniczej jest wyłączony (przycisk ustawiony na 0), a następnie podłącz przewód zasilający do gniazda zasilania.
Włóż wtyczkę zasilania do skrzynki sterowniczej.
Ostrzeżenie
Jeśli robot nie jest bezpiecznie umieszczony na solidnej powierzchni, może się przewrócić i spowodować obrażenia.
Nie włączaj i nie wyłączaj szybko zasilania skrzynki sterowniczej. Zaleca się, aby czas między wyłączeniem (OFF) a ponownym włączeniem (ON) zasilania skrzynki sterowniczej był dłuższy niż 1 minutę.
4.2. Uruchamianie robota za pomocą panelu operatorskiego
Skrzynka sterownicza łączy ramię robota, panel operatorski oraz fizyczne elektryczne wejścia/wyjścia wszelkich urządzeń peryferyjnych. Skrzynka sterownicza musi być włączona, aby zasilić ramię robota.
Naciśnij przycisk zasilania na skrzynce sterowniczej, aby ją włączyć.
Po uruchomieniu robota jest on w trybie ręcznym i nie jest załączony. Aby obsługiwać robota w trybie ręcznym, należy nacisnąć trójpozycyjny przełącznik załączający na panelu operatorskim w sekwencji OFF (zwolnienie) ⇒ ON (naciśnięcie) ⇒ OFF (zwolnienie). Gdy przełącznik jest w stanie ON, można przeciągać lub sterować ruchem robota.
Jeśli nie ma potrzeby obsługi robota w trybie ręcznym, można użyć przełącznika kluczykowego na panelu operatorskim, aby przełączyć tryb pracy robota: automatyczny, ręczny, niestandardowy.
Podczas przełączania robota w tryb ręczny należy sprawdzić, czy w przestrzeni bezpieczeństwa i poza nią nie ma nieprawidłowości, i ostrożnie obsługiwać ruch robota.
Podczas przełączania robota w tryb automatyczny należy sprawdzić środki bezpieczeństwa, przywrócić je do stanu normalnego i ostrożnie obsługiwać ruch robota.
Jeśli nie można normalnie otworzyć panelu operatorskiego, sprawdź, czy połączenia urządzenia są prawidłowe.
4.3. Sterowanie ruchem robota za pomocą panelu przyciskowego
Zgodnie z rozdziałem 3.6.3. Definicja końcowego LED w 3. Instalacja sprzętowa, steruj robotem. Istniejące panele przyciskowe dzielą się na 60 przyciskowy panel (POE)(BX01), 60 przyciskowy panel (POE)(BX02)-V1.0, 60 przyciskowy panel (POE)(BX02)-V2.0. Na przykładzie 60 przyciskowego panelu (POE)(BX01), kroki operacyjne są następujące.
4.3.1. Bez podłączonego panelu operatorskiego
Krok 1: Włącz przełącznik zasilania skrzynki sterowniczej robota, uruchom robota. Poczekaj, aż końcowa dioda LED będzie świecić na zielono, zanim zaczniesz obsługiwać robota, jak na rysunku:
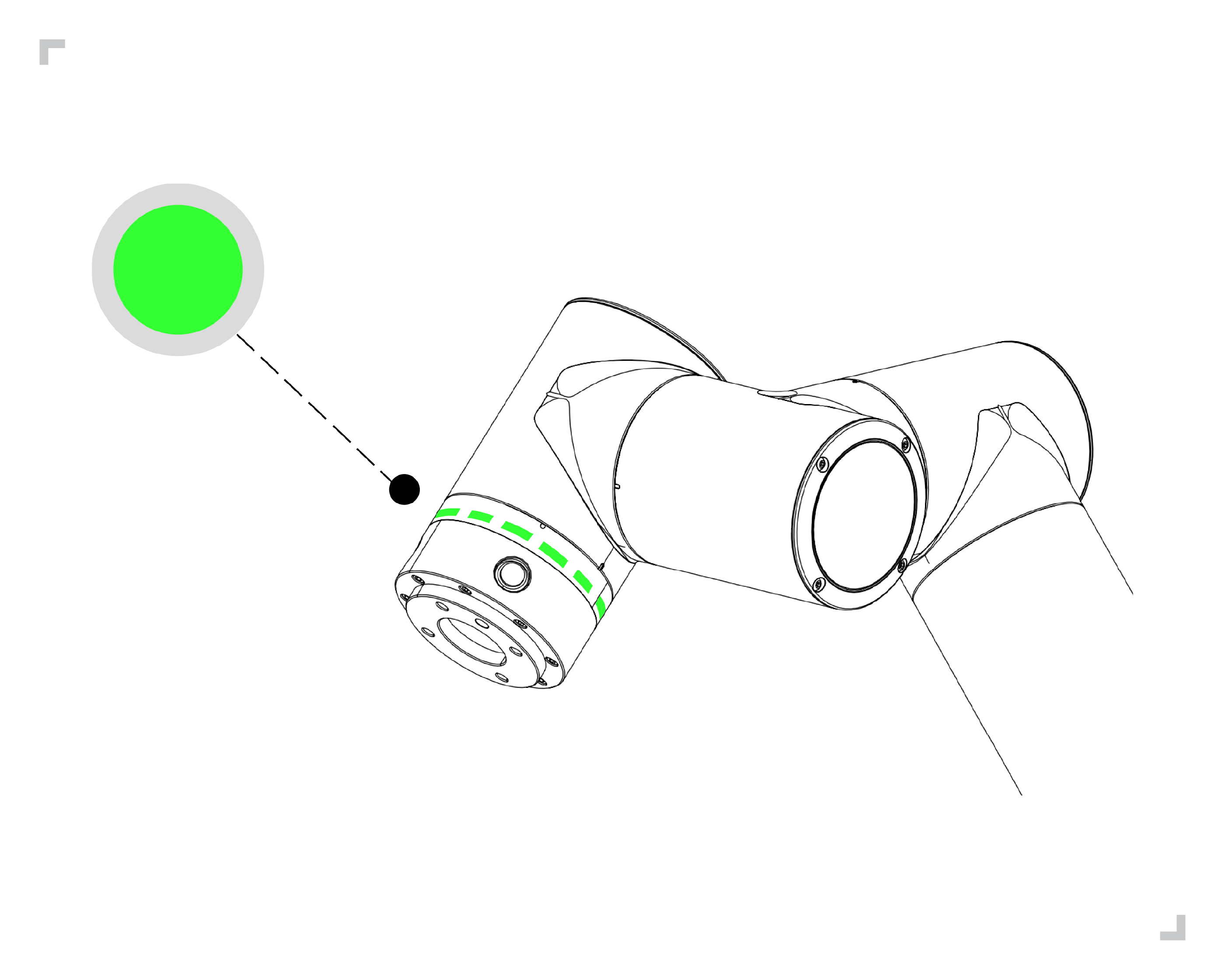
Wykres 4.3-1 Schemat zielonej końcowej diody LED
Krok 2: Naciśnij i przytrzymaj „Przycisk 2” na panelu przyciskowym, aby przejść do trybu bez podłączonego panelu operatorskiego. Końcowa dioda LED mignie trzy razy na błękitno, jak na rysunku:
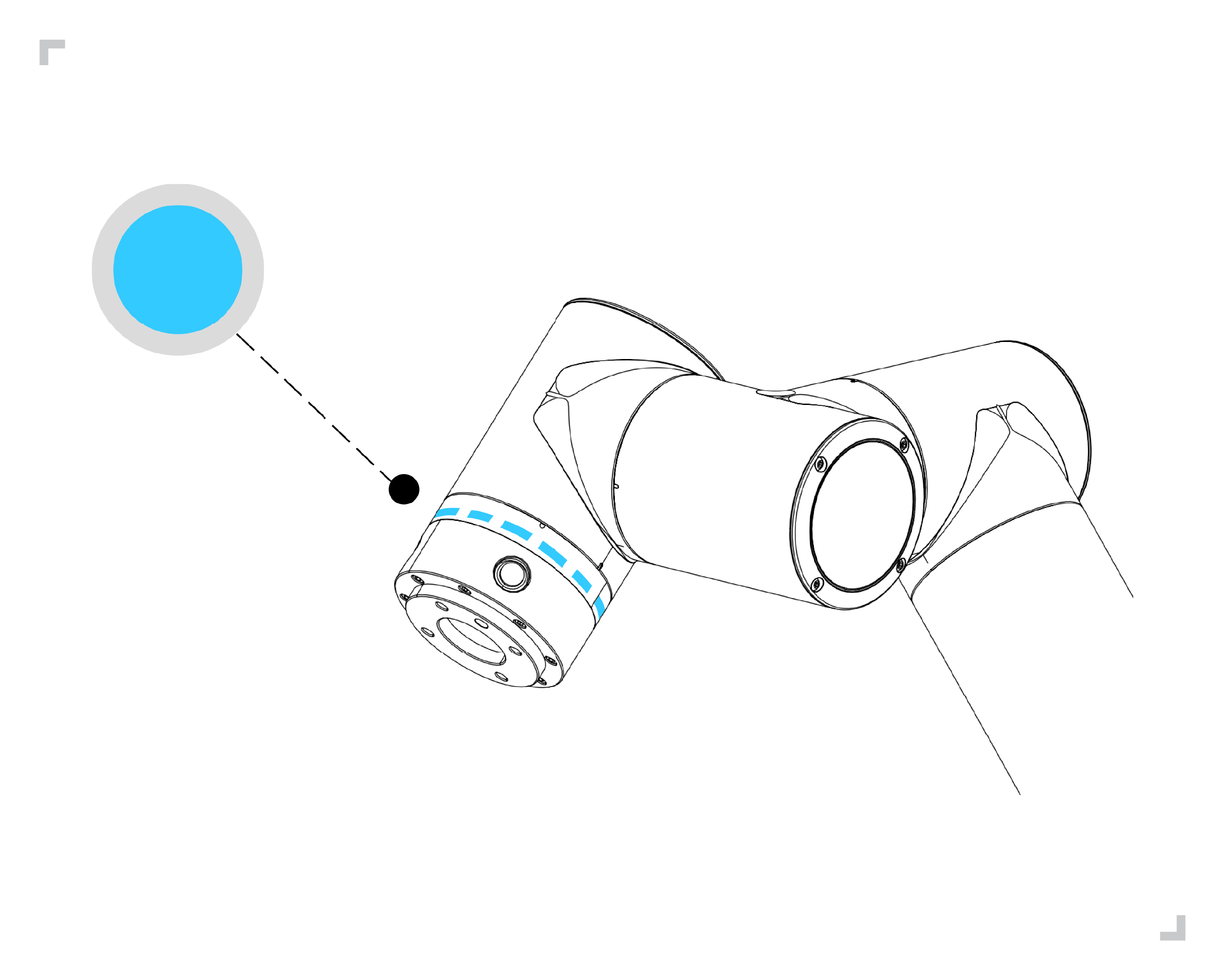
Wykres 4.3-2 Schemat błękitnej końcowej diody LED
Krok 3: Naciśnij i przytrzymaj „Przycisk 1” na panelu przyciskowym, aby przełączyć robota w tryb przeciągania. W tym momencie końcowa dioda LED świeci na biało-błękitnie, jak na Wykresie 4.3-3. Przesuń robota w dowolne miejsce, naciśnij i przytrzymaj „Przycisk 1”, aby wyjść z trybu przeciągania. Krótko naciśnij „Przycisk 2” na panelu przyciskowym, aby zapisać punkt P1. Końcowa dioda LED mignie trzy razy na fioletowo, jak na Wykresie 4.3-4.
Krok 4: Przesuń robota, krótko naciśnij „Przycisk 2” na panelu przyciskowym, aby zapisać punkt P2. Końcowa dioda LED mignie trzy razy na fioletowo, jak na Wykresie 4.3-4.
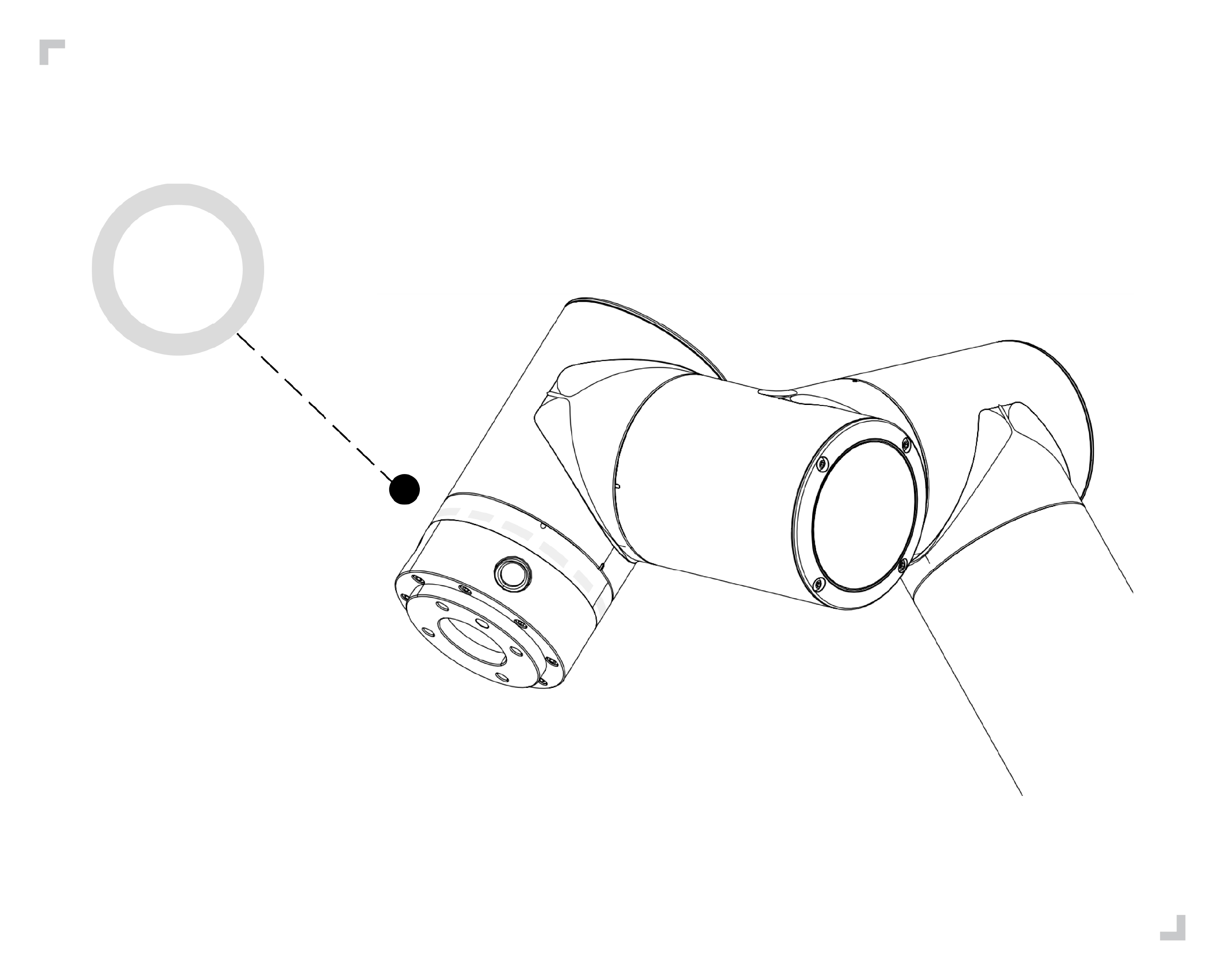
Wykres 4.3-3 Schemat biało-błękitnej końcowej diody LED
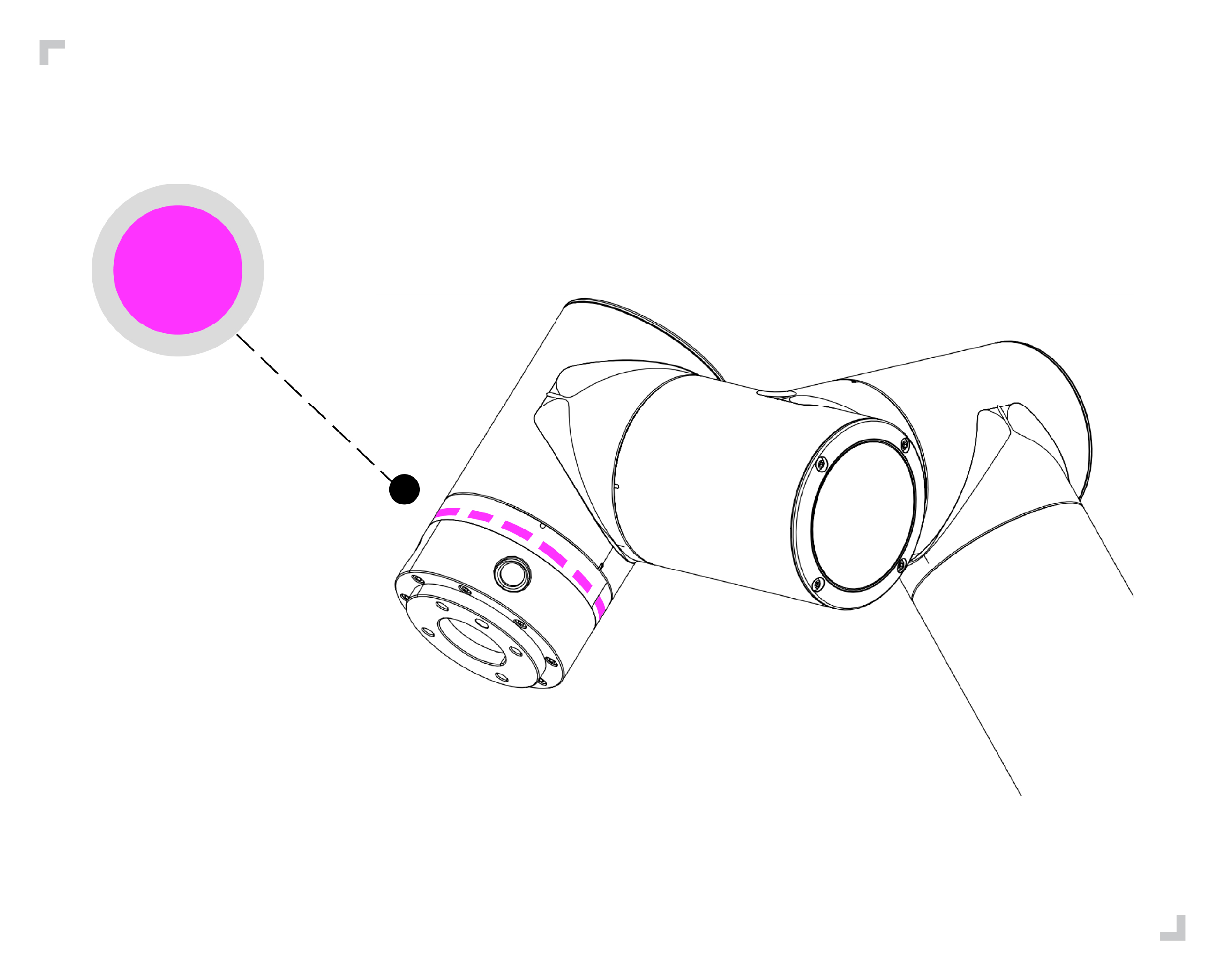
Wykres 4.3-4 Schemat fioletowej końcowej diody LED
Krok 5: Naciśnij i przytrzymaj „Przycisk 1” na panelu przyciskowym, aby wyjść z trybu przeciągania. Robot jest teraz w trybie ręcznym, a końcowa dioda LED świeci na zielono, jak na Wykresie 4.3-5. Krótko naciśnij „Przycisk 1”, aby przełączyć robota w tryb automatyczny. W tym momencie końcowa dioda LED świeci na niebiesko, jak na Wykresie 4.3-6.
Krok 6: Krótko naciśnij „Przycisk 3” na panelu przyciskowym, aby uruchomić program. Końcowa dioda LED mignie dwa razy na niebiesko, jak na Wykresie 4.3-6.
Wykres 4.3-5 Schemat zielonej końcowej diody LED
Wykres 4.3-6 Schemat niebieskiej końcowej diody LED
Krok 7: Krótko naciśnij „Przycisk 3” na panelu przyciskowym, aby zatrzymać działanie programu. Końcowa dioda LED mignie trzy razy na czerwono, jak na rysunku:
Wykres 4.3-7 Schemat czerwonej końcowej diody LED
4.3.2. Z podłączonym panelem operatorskim
Krok 1: Uruchom robota. Poczekaj, aż zielona końcowa dioda LED przestanie migać, zanim zaczniesz obsługiwać robota.
Krok 2: Otwórz panel operatorski i przejdź do interfejsu edycji programu.
Krok 3: Wybierz pusty szablon, aby utworzyć nowy plik programu.
Krok 4: Krótko naciśnij przycisk 1 na panelu przyciskowym, aby przełączyć robota w tryb ręczny. W tym momencie końcowa dioda LED świeci na zielono.
Krok 5: Naciśnij i przytrzymaj przycisk 1 na panelu przyciskowym, aby przełączyć robota w tryb przeciągania. W tym momencie końcowa dioda LED świeci na biało-błękitnie. Przesuń robota w dowolne miejsce, krótko naciśnij przycisk 2 na panelu przyciskowym, aby zapisać punkt P1. Końcowa dioda LED mignie trzy razy na fioletowo. Ręcznie dodaj instrukcję „PTP(p1,100,-1,0)” do pliku programu.
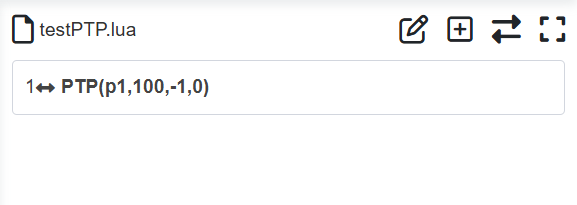
Wykres 4.3-8 Zapisywanie i dodawanie punktu P1
Krok 6: Przesuń robota, krótko naciśnij przycisk 2 na panelu przyciskowym, aby zapisać punkt P2. Końcowa dioda LED mignie trzy razy na fioletowo. Ręcznie dodaj instrukcję „PTP(p2,100,-1,0)” do programu.
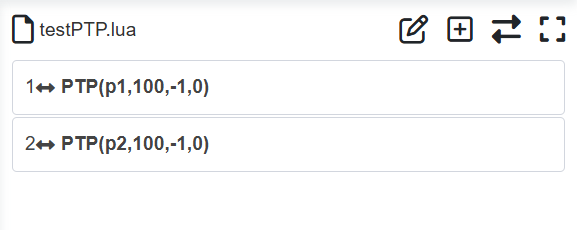
Wykres 4.3-9 Zapisywanie i dodawanie punktu P2
Krok 7: Zapisz zawartość pliku programu.
Krok 8: Naciśnij i przytrzymaj przycisk 1 na panelu przyciskowym, aby wyjść z trybu przeciągania. Robot jest teraz w trybie ręcznym, a końcowa dioda LED świeci na zielono. Krótko naciśnij przycisk 1 na panelu przyciskowym, aby przełączyć robota w tryb automatyczny. W tym momencie końcowa dioda LED świeci na niebiesko.
Krok 9: Krótko naciśnij przycisk 3 na panelu przyciskowym, aby uruchomić program. Końcowa dioda LED mignie dwa razy na niebiesko.
4.4. Sterowanie ruchem robota za pomocą panelu operatorskiego
Kliknij przycisk „Program nauczania” w lewym menu głównym panelu operatorskiego, a następnie kliknij jego podmenu „Programowanie”, aby przejść do interfejsu nauczania programu. W tym interfejsie realizowane jest głównie pisanie i modyfikowanie programów nauczania robota.
Po kliknięciu ikony przycisku „Nowy” użytkownik nadaje nazwę plikowi i wybiera szablon jako zawartość nowego pliku. Kliknięcie „Nowy” spowoduje utworzenie pliku i otwarcie go.
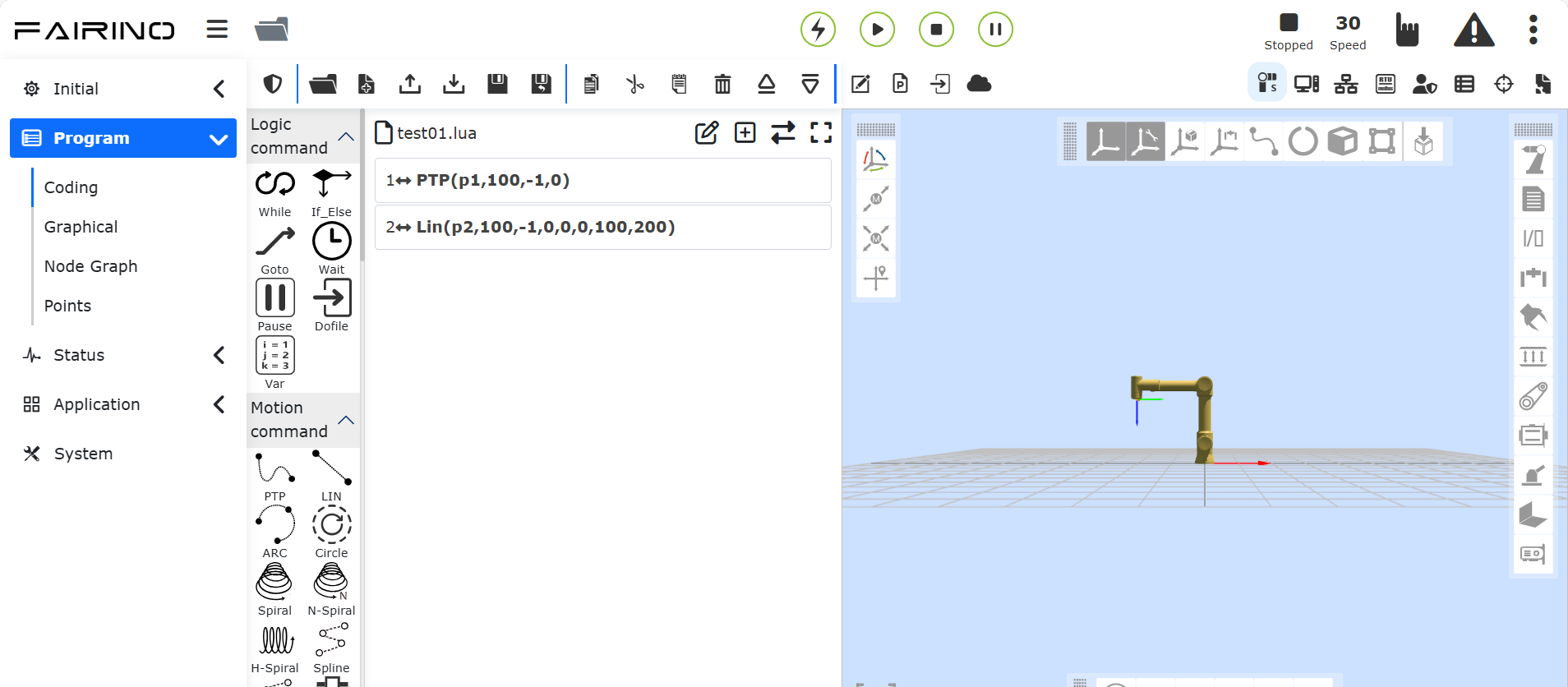
Wykres 4.4-1 Schemat działania programu nauczania
Ostrzeżenie
Głowa i tułów nie mogą znajdować się w zasięgu robota (strefie roboczej). Nie wkładaj palców w miejsca, które robot może chwycić.
Ważne
Nie dopuść, aby robot uderzył w siebie lub inne obiekty, ponieważ może to spowodować uszkodzenie robota.
Jest to tylko przewodnik szybkiego startu, który pokazuje, jak łatwo używać robota współpracującego FR. Przewodnik ten zakłada, że środowisko jest bezpieczne i niegroźne, a użytkownik działa ostrożnie. Nie zwiększaj prędkości ani przyspieszenia powyżej wartości domyślnych. Zawsze przeprowadzaj ocenę ryzyka przed uruchomieniem robota.