W niniejszej instrukcji użyto następujących ostrzeżeń, których celem jest zapewnienie bezpieczeństwa osób i sprzętu. Podczas czytania niniejszej instrukcji niezwykle ważne jest przestrzeganie i wykonywanie wszystkich instrukcji montażu i wytycznych zawartych w innych rozdziałach tej instrukcji. Należy zwrócić szczególną uwagę na tekst związany z symbolami ostrzegawczymi.
Ważne
FAIRINO odmawia wszelkiej odpowiedzialności, jeśli robot (korpus robota, skrzynka sterownicza, panel operatorski lub panel przyciskowy) został uszkodzony, zmieniony lub zmodyfikowany z winy człowieka.
FAIRINO nie ponosi odpowiedzialności za jakiekolwiek uszkodzenia robota lub jakiegokolwiek innego urządzenia spowodowane błędami w programach napisanych przez klienta.
Podczas obsługi systemu robotycznego należy przede wszystkim zapewnić bezpieczeństwo personelu. Poniżej wymieniono ogólne środki ostrożności. Należy podjąć odpowiednie środki w celu zapewnienia bezpieczeństwa personelu.
Każdy pracownik obsługujący system robotyczny powinien przejść szkolenie prowadzone przez FAIRINO (Suzhou) Robot Technology Co., Ltd. Użytkownik musi zapewnić, że posiada pełną znajomość bezpiecznych i standardowych procedur operacyjnych oraz kwalifikacje do obsługi robota. Szczegółowe informacje na temat szkolenia można uzyskać w naszej firmie pod adresem e-mail: jiling@frtech.fr.
Pracownicy obsługujący system robotyczny nie powinni nosić luźnej odzieży ani biżuterii. Podczas obsługi robota należy upewnić się, że długie włosy są związane z tyłu głowy.
Podczas pracy urządzenia, nawet jeśli robot wydaje się zatrzymany, może to być spowodowane oczekiwaniem na sygnał startu i może być w stanie gotowości do ruchu. Nawet w takim stanie robot należy traktować jako będący w ruchu.
Należy narysować linie na podłodze, aby wyraźnie oznaczyć zakres ruchu robota, tak aby operator znał zakres ruchu robota, w tym trzymanych narzędzi (chwytaków, narzędzi itp.).
Należy zapewnić środki bezpieczeństwa w pobliżu obszaru operacyjnego robota (np. barierki, liny lub ekrany ochronne), aby chronić operatora i osoby postronne. W razie potrzeby należy zastosować blokady, aby osoby inne niż operator odpowiedzialny za obsługę nie mogły uzyskać dostępu do zasilania robota.
Podczas korzystania z panelu operacyjnego i panelu operatorskiego, ponieważ noszenie rękawic może prowadzić do błędów operacyjnych, należy zdjąć rękawice przed przystąpieniem do pracy.
W sytuacjach awaryjnych i nadzwyczajnych, takich jak przyciśnięcie lub otoczenie osoby przez robota, należy wymusić ruch stawu poprzez pchanie lub ciągnięcie ramienia robota z dużą siłą (co najmniej 700 N). Ręczne przesuwanie ramienia robota bez napędu elektrycznego jest dozwolone tylko w sytuacjach awaryjnych i może spowodować uszkodzenie stawów.
Ocena ryzyka powinna uwzględniać cały potencjalny kontakt między operatorem a robotem podczas normalnego użytkowania oraz przewidywalne nieprawidłowe działania. Szyja, twarz i głowa operatora nie powinny być narażone na kontakt. Używanie robota bez zewnętrznych urządzeń zabezpieczających wymaga najpierw przeprowadzenia oceny ryzyka w celu ustalenia, czy związane z tym zagrożenia stanowią niedopuszczalne ryzyko, na przykład:
Używanie ostrych efektorów końcowych lub złączy narzędzi może stwarzać zagrożenie.
Przetwarzanie substancji toksycznych lub innych szkodliwych substancji może stwarzać zagrożenie.
Ryzyko przyciśnięcia palców operatora przez podstawę lub stawy robota.
Ryzyko związane z kolizją z robotem.
Ryzyko związane z niewłaściwym zamocowaniem robota lub narzędzia przymocowanego do końcówki.
Zagrożenie spowodowane uderzeniem między ładunkiem robota a twardą powierzchnią.
Integrator musi za pomocą oceny ryzyka określić takie zagrożenia i związane z nimi poziomy ryzyka oraz określić i wdrożyć odpowiednie środki w celu zmniejszenia ryzyka do akceptowalnego poziomu. Należy pamiętać, że w przypadku konkretnego urządzenia robotycznego mogą istnieć inne istotne zagrożenia.
Łącząc nieodłączne środki bezpieczeństwa konstrukcyjne stosowane w robotach FR z normami bezpieczeństwa lub ocenami ryzyka wdrożonymi przez integratora i użytkownika końcowego, ryzyko związane z operacjami współpracy FR jest zmniejszane tak bardzo, jak to racjonalnie możliwe. Za pomocą niniejszej instrukcji wszelkie pozostałe zagrożenia istniejące przed instalacją robota są przekazywane integratorowi i użytkownikowi końcowemu. Jeśli ocena ryzyka integratora wykaże, że w konkretnym zastosowaniu istnieją zagrożenia, które mogą stanowić niedopuszczalne ryzyko dla użytkownika, integrator musi podjąć odpowiednie środki zmniejszające ryzyko w celu wyeliminowania lub zminimalizowania tych zagrożeń, aż do momentu, gdy ryzyko zostanie zmniejszone do akceptowalnego poziomu. Używanie przed podjęciem odpowiednich środków zmniejszających ryzyko (jeśli to konieczne) jest niebezpieczne.
Jeśli robot jest instalowany w sposób niekooperacyjny (np. podczas używania niebezpiecznych narzędzi), ocena ryzyka może sugerować, że integrator musi podłączyć dodatkowe urządzenia bezpieczeństwa (np. urządzenia rozruchowe bezpieczeństwa) podczas programowania, aby zapewnić bezpieczeństwo personelu i sprzętu.
Informacje zawarte w niniejszej instrukcji nie obejmują projektowania, instalacji i obsługi kompletnego zastosowania robota ani wszystkich urządzeń peryferyjnych, które mogą mieć wpływ na bezpieczeństwo tego kompletnego systemu. Projekt i instalacja tego kompletnego systemu muszą być zgodne z wymaganiami bezpieczeństwa określonymi w normach i przepisach kraju, w którym robot jest instalowany.
Integrator FAIRINO jest odpowiedzialny za zapewnienie zgodności z odpowiednimi przepisami krajowymi oraz za zapewnienie, że w kompletnym zastosowaniu robota nie występują żadne istotne zagrożenia. Obejmuje to między innymi:
Przeprowadzenie oceny ryzyka dla kompletnego systemu robotycznego.
Podłączenie innych maszyn i dodatkowych urządzeń bezpieczeństwa zdefiniowanych w ocenie ryzyka.
Ustanowienie odpowiednich ustawień bezpieczeństwa w oprogramowaniu.
Zapewnienie, że użytkownik nie będzie modyfikować żadnych środków bezpieczeństwa.
Potwierdzenie, że projekt i instalacja całego systemu robotycznego są prawidłowe.
Określenie instrukcji użytkowania.
Umieszczenie na robocie odpowiednich oznaczeń i danych kontaktowych integratora.
Zebranie całej dokumentacji z plików technicznych, w tym niniejszej instrukcji.
Żadnych informacji dotyczących bezpieczeństwa zawartych w niniejszej instrukcji nie należy uważać za ogólne gwarancje bezpieczeństwa robota. Nawet przy przestrzeganiu wszystkich instrukcji bezpieczeństwa nadal może dojść do obrażeń ciała lub uszkodzenia sprzętu.
Poniższe symbole określają poziomy zagrożenia opisane w niniejszej instrukcji. Te same symbole ostrzegawcze są używane na produkcie.
Ważne
Niebezpieczeństwo: Oznacza to zbliżającą się niebezpieczną sytuację związaną z energią elektryczną, która, jeśli nie zostanie uniknięta, może spowodować śmierć lub poważne obrażenia.
Ważne
Ryzyko porażenia prądem: Oznacza to zbliżającą się niebezpieczną sytuację porażenia prądem, która, jeśli nie zostanie uniknięta, może spowodować śmierć lub poważne obrażenia w wyniku porażenia prądem.
Ważne
Ryzyko oparzenia: Oznacza to gorącą powierzchnię, która może stwarzać zagrożenie. Jeśli dojdzie do kontaktu, może spowodować obrażenia ciała.
Przed pierwszym użyciem robota lub po jakiejkolwiek modyfikacji, domyślna prędkość robota jest niższa niż 250 mm/s. Nie należy logować się jako administrator w celu zmiany prędkości na tryb szybki. Po tym należy przeprowadzić następujące testy. Upewnij się, że wszystkie bezpieczne wejścia i wyjścia są prawidłowe i prawidłowo podłączone. Przetestuj wszystkie podłączone bezpieczne wejścia i wyjścia (w tym urządzenia współdzielone przez wiele maszyn lub robotów) pod kątem prawidłowego działania. W tym celu należy:
Przetestować, czy przyciski i wejścia awaryjnego zatrzymania mogą zatrzymać robota i uruchomić hamulce.
Przetestować, czy wejścia zabezpieczające mogą zatrzymać ruch robota. Jeśli skonfigurowano resetowanie zabezpieczeń, sprawdzić, czy wymagana jest aktywacja przed wznowieniem ruchu.
Przetestować, czy tryb pracy umożliwia przełączanie trybów pracy. Patrz ikona w prawym górnym rogu interfejsu użytkownika.
Przetestować, czy trójpozycyjny przełącznik załączający musi być naciśnięty, aby rozpocząć ruch w trybie ręcznym, oraz czy robot jest pod kontrolą prędkości (funkcja nie jest obsługiwana przed wersją oprogramowania robota V3.0).
Przetestować, czy wyjście awaryjnego zatrzymania systemu może doprowadzić cały system do stanu bezpiecznego.
Przycisk awaryjnego zatrzymania to zatrzymanie kategorii 0. Naciśnięcie przycisku awaryjnego zatrzymania natychmiast zatrzymuje wszelki ruch robota.
Poniższa tabela przedstawia odległości i czasy zatrzymania dla zatrzymania kategorii 0. Pomiary te odpowiadają następującej konfiguracji robota:
Wyciągnięcie: 100% (ramię robota całkowicie wyciągnięte poziomo)
Prędkość: 100% (ogólna prędkość robota ustawiona na 100%, ruch z prędkością stawu 180°/s)
Ładowność: Maksymalna ładowność
Joint 1, Joint 6 testują ruch poziomy robota, oś obrotu prostopadła do podłoża. Joint 2, Joint 3, Joint 4, Joint 5 testują robota poruszającego się po trajektorii pionowej, oś obrotu równoległa do podłoża, zatrzymanie podczas ruchu robota w dół.
Tabela 3.1-1 Odległość zatrzymania kategorii 0 (rad)
Joint 1
Joint 2
Joint 3
Joint 4
Joint 5
Joint 6
FR3
0,47
0,60
0,56
0,29
0,10
0,06
FR3-WMS
0,47
0,60
0,56
0,29
0,10
0,06
FR3-WML
0,51
0,63
0,60
0,33
0,16
0,10
FR3-C
0,47
0,60
0,56
0,29
0,10
0,06
FR5
0,51
0,63
0,60
0,33
0,16
0,10
FR5-C
0,51
0,63
0,60
0,33
0,16
0,10
FR10
0,64
0,70
0,69
0,42
0,25
0,13
FR16
0,60
0,67
0,65
0,39
0,22
0,12
FR20
0,69
0,75
0,80
0,48
0,31
0,22
FR30L
0,69
0,75
0,80
0,48
0,31
0,22
Tabela 3.1-2 Czas zatrzymania kategorii 0 (ms)
Joint 1
Joint 2
Joint 3
Joint 4
Joint 5
Joint 6
FR3
400
470
450
280
120
90
FR3-WMS
400
470
450
280
120
90
FR3-WML
400
470
450
280
120
90
FR3-C
400
470
450
280
120
90
FR5
420
500
480
310
150
120
FR5-C
420
500
480
310
150
120
FR10
460
540
510
330
170
140
FR16
440
530
490
320
160
130
FR20
540
600
700
400
260
170
FR30L
540
600
700
400
260
170
Po awaryjnym zatrzymaniu wyłącz zasilanie, obróć przycisk awaryjnego zatrzymania i włącz zasilanie, aby ponownie uruchomić robota.
Czasy i odległości zatrzymania dla bezpiecznego zatrzymania robota i zatrzymania miękkim limitem przedstawiono w poniższej tabeli. Pomiary te odpowiadają następującej konfiguracji robota:
Wyciągnięcie: 100% (ramię robota całkowicie wyciągnięte poziomo)
Prędkość: 100% (ogólna prędkość robota ustawiona na 100%, ruch z prędkością stawu 180°/s)
Ładowność: Maksymalna ładowność
Joint 1, Joint 6 testują ruch poziomy robota, oś obrotu prostopadła do podłoża. Joint 2, Joint 3, Joint 4, Joint 5 testują robota poruszającego się po trajektorii pionowej, oś obrotu równoległa do podłoża, zatrzymanie podczas ruchu robota w dół.
Tabela 3.1-3 Odległość bezpiecznego zatrzymania (rad)
Joint 1
Joint 2
Joint 3
Joint 4
Joint 5
Joint 6
FR3
0,49
0,63
0,58
0,32
0,12
0,09
FR3-WMS
0,49
0,63
0,58
0,32
0,12
0,09
FR3-WML
0,54
0,65
0,63
0,35
0,19
0,12
FR3-C
0,49
0,63
0,58
0,32
0,12
0,09
FR5
0,54
0,65
0,63
0,35
0,19
0,12
FR5-C
0,54
0,65
0,63
0,35
0,19
0,12
FR10
0,66
0,73
0,71
0,45
0,27
0,14
FR16
0,63
0,69
0,68
0,41
0,25
0,14
FR20
0,71
0,78
0,82
0,51
0,33
0,25
FR30L
0,71
0,78
0,82
0,51
0,33
0,25
Tabela 3.1-4 Czas bezpiecznego zatrzymania (ms)
Joint 1
Joint 2
Joint 3
Joint 4
Joint 5
Joint 6
FR3
410
490
410
300
130
110
FR3-WMS
410
490
410
300
130
110
FR3-WML
410
490
410
300
130
110
FR3-C
410
490
410
300
130
110
FR5
450
520
510
330
180
140
FR5-C
450
520
510
330
180
140
FR10
480
570
530
360
190
170
FR16
470
550
520
340
190
150
FR20
560
630
720
430
280
200
FR30L
560
630
720
430
280
200
Tabela 3.1-5 Odległość zatrzymania miękkim limitem (rad)
Joint 1
Joint 2
Joint 3
Joint 4
Joint 5
Joint 6
FR3
0,52
0,65
0,61
0,34
0,15
0,11
FR3-WMS
0,52
0,65
0,61
0,34
0,15
0,11
FR3-WML
0,56
0,68
0,65
0,38
0,21
0,15
FR3-C
0,52
0,65
0,61
0,34
0,15
0,11
FR5
0,56
0,68
0,65
0,38
0,21
0,15
FR5-C
0,56
0,68
0,65
0,38
0,21
0,15
FR10
0,69
0,75
0,74
0,47
0,30
0,18
FR16
0,65
0,72
0,70
0,44
0,27
0,17
FR20
0,74
0,80
0,85
0,53
0,36
0,27
FR30L
0,74
0,80
0,85
0,53
0,36
0,27
Tabela 3.1-6 Czas zatrzymania miękkim limitem (ms)
Joint 1
Joint 2
Joint 3
Joint 4
Joint 5
Joint 6
FR3
430
500
430
310
150
120
FR3-WMS
430
500
430
310
150
120
FR3-WML
430
500
430
310
150
120
FR3-C
430
500
430
310
150
120
FR5
460
540
520
350
190
160
FR5-C
460
540
520
350
190
160
FR10
500
580
550
370
210
180
FR16
480
570
530
360
200
170
FR20
580
640
740
440
300
210
FR30L
580
640
740
440
300
210
Ważne
Zgodnie z IEC 60204-1 i ISO 13850, urządzenia awaryjnego zatrzymania nie są urządzeniami zabezpieczającymi. Stanowią one dodatkowe środki ochronne i nie służą do zapobiegania obrażeniom.
3.1.10. Ręczne przesuwanie bez napędu elektrycznego
Jeśli konieczne jest przesunięcie stawu robota, ale nie można dostarczyć zasilania do robota lub w innych sytuacjach awaryjnych, należy skontaktować się z dystrybutorem robota. W razie potrzeby można użyć siły, aby wymusić ruch robota w celu uwolnienia uwięzionej osoby.
Robot i skrzynka sterownicza zostały skalibrowane jako kompletny zestaw. Nie należy ich rozdzielać, ponieważ wymagałoby to ponownej kalibracji.
Robot powinien być transportowany tylko w oryginalnym opakowaniu. Jeśli robot ma być przenoszony w przyszłości, należy przechowywać materiał opakowaniowy w suchym miejscu.
Podczas przenoszenia robota z opakowania do przestrzeni montażowej należy jednocześnie podtrzymywać oba ramiona robota. Podtrzymywać robota, aż wszystkie śruby montażowe podstawy robota zostaną dokręcone.
W zależności od modelu robota współpracującego, jego całkowita masa (wraz z opakowaniem) mieści się w zakresie 15 kg - 80 kg. Podczas przenoszenia lub przemieszczania robota współpracującego siłą ludzkich mięśni, do podnoszenia potrzebna jest pomoc kilku osób. Nie zaleca się przenoszenia przez jedną osobę. Podczas transportu należy zachować ostrożność, aby uniknąć przewrócenia się lub zsunięcia urządzenia.
Ostrzeżenie
Jeśli do przenoszenia używany jest profesjonalny sprzęt, robot współpracujący musi być transportowany lub przenoszony przez wykwalifikowany personel z odpowiednimi uprawnieniami za pomocą dźwigu lub wózka widłowego. W przeciwnym razie może to spowodować obrażenia ciała lub inne wypadki.
W przypadku przenoszenia ręcznego należy zwrócić uwagę na bezpieczeństwo osobiste podczas transportu.
Robot współpracujący zawiera precyzyjne elementy. Należy unikać silnych wibracji lub wstrząsów podczas transportu lub przenoszenia, ponieważ może to obniżyć wydajność urządzenia.
Użytkownik powinien co miesiąc testować awaryjne i ochronne zatrzymanie. Sprawdzać, czy funkcje bezpieczeństwa są skuteczne. Podłączenie awaryjnego i ochronnego zatrzymania można znaleźć w rozdziale dotyczącym podłączeń.
W niniejszej instrukcji użyto następujących ostrzeżeń, których celem jest zapewnienie bezpieczeństwa osób i sprzętu. Podczas czytania niniejszej instrukcji niezwykle ważne jest przestrzeganie i wykonywanie wszystkich instrukcji montażu i wytycznych zawartych w innych rozdziałach tej instrukcji.
Należy zwrócić szczególną uwagę na tekst związany z symbolami ostrzegawczymi. Przed użyciem należy dokładnie zapoznać się z instrukcją użytkownika. Niniejsza instrukcja służy wyłącznie jako instrukcja serwisowa dla klienta. Personel konserwacyjny musi posiadać odpowiednie kwalifikacje. FAIRINO odmawia wszelkiej odpowiedzialności za operacje wykonywane przez niekwalifikowany personel.
Informacja
Jeśli robot (korpus robota, skrzynka sterownicza, panel operatorski) został uszkodzony, zmieniony lub zmodyfikowany z winy człowieka, FAIRINO odmawia wszelkiej odpowiedzialności. FAIRINO nie ponosi odpowiedzialności za jakiekolwiek uszkodzenia robota lub jakiegokolwiek innego urządzenia spowodowane błędami w programach napisanych przez klienta.
Informacje zawarte w niniejszej instrukcji nie obejmują projektowania, instalacji i obsługi kompletnego zastosowania robota ani wszystkich urządzeń peryferyjnych, które mogą mieć wpływ na bezpieczeństwo tego kompletnego systemu. Projekt i instalacja tego kompletnego systemu muszą być zgodne z wymaganiami bezpieczeństwa określonymi w normach i przepisach kraju, w którym robot jest instalowany.
Integrator FAIRINO jest odpowiedzialny za zapewnienie zgodności z odpowiednimi przepisami krajowymi oraz za zapewnienie, że w kompletnym zastosowaniu robota nie występują żadne istotne zagrożenia. Obejmuje to między innymi:
Przeprowadzenie oceny ryzyka dla kompletnego systemu robotycznego.
Podłączenie innych maszyn i dodatkowych urządzeń bezpieczeństwa zdefiniowanych w ocenie ryzyka.
Ustanowienie odpowiednich ustawień bezpieczeństwa w oprogramowaniu.
Zapewnienie, że użytkownik nie będzie modyfikować żadnych środków bezpieczeństwa.
Potwierdzenie, że projekt i instalacja całego systemu robotycznego są prawidłowe.
Określenie instrukcji użytkowania.
Umieszczenie na robocie odpowiednich oznaczeń i danych kontaktowych integratora.
Zebranie całej dokumentacji z plików technicznych, w tym niniejszej instrukcji.
Żadnych informacji dotyczących bezpieczeństwa zawartych w niniejszej instrukcji nie należy uważać za ogólne gwarancje bezpieczeństwa robota. Nawet przy przestrzeganiu wszystkich instrukcji bezpieczeństwa nadal może dojść do obrażeń ciała lub uszkodzenia sprzętu.
Poniższe symbole określają poziomy zagrożenia opisane w niniejszej instrukcji. Te same symbole ostrzegawcze są używane na produkcie.
Informacja
Nazwa: Niebezpieczeństwo
Funkcja: Oznacza to zbliżającą się niebezpieczną sytuację związaną z energią elektryczną, która, jeśli nie zostanie uniknięta, może spowodować śmierć lub poważne obrażenia.
Informacja
Nazwa: Ryzyko porażenia prądem
Funkcja: Oznacza to zbliżającą się niebezpieczną sytuację porażenia prądem, która, jeśli nie zostanie uniknięta, może spowodować śmierć lub poważne obrażenia w wyniku porażenia prądem.
Informacja
Nazwa: Ryzyko oparzenia
Funkcja: Oznacza to gorącą powierzchnię, która może stwarzać zagrożenie. Jeśli dojdzie do kontaktu, może spowodować obrażenia ciała.
3.3.3. Opis cyfrowych wejść i wyjść skrzynki sterowniczej
3.3.3.1. Środki ostrożności podczas przełączania funkcji związanych z cyfrowymi wejściami/wyjściami skrzynki sterowniczej
Ważne
Podczas przełączania funkcji cyfrowych wejść/wyjść należy przestrzegać zasad bezpiecznej obsługi robota, aby zapewnić bezpieczeństwo operatora i sprzętu.
Podczas pracy robota unikaj przełączania funkcji cyfrowych wejść/wyjść, aby nie zakłócać normalnej pracy robota.
Przed przystąpieniem do przełączania funkcji cyfrowych wejść/wyjść należy koniecznie odciąć zasilanie robota, aby zapobiec porażeniu prądem i nieoczekiwanemu ruchowi robota, co mogłoby spowodować obrażenia ciała i uszkodzenie sprzętu.
Przed przełączeniem funkcji należy dokładnie określić wymagania systemu sterowania robota dotyczące cyfrowych wejść/wyjść, w tym typ sygnału, poziom napięcia, zdolność obciążeniową itp.
Upewnij się, że połączenie między portami cyfrowych wejść/wyjść a urządzeniami zewnętrznymi jest prawidłowe, w tym, czy połączenia są solidne, czy porty pasują itp.
Unikaj podwójnego przypisywania sygnałów, upewnij się, że przypisanie każdego sygnału jest unikalne.
Po zakończeniu przypisywania uruchom ponownie system sterowania robota, aby ustawienia zaczęły obowiązywać.
Po zakończeniu konfiguracji przejdź do interfejsu stanu I/O i sprawdź, czy stan sygnałów cyfrowych wejść/wyjść jest prawidłowy.
Poprzez rzeczywiste działanie lub napisanie programu testowego zweryfikuj, czy funkcja cyfrowych wejść/wyjść działa prawidłowo.
Jeśli sygnały cyfrowych wejść/wyjść są związane z logiką programu, sprawdź, czy obsługa tych sygnałów w programie jest prawidłowa.
3.3.3.2. Opis cyfrowych wejść skrzynki sterowniczej
Poniżej wymieniono typy wejść obsługiwane przez cyfrowe wejścia zintegrowanej mini skrzynki sterowniczej robota FAIRINO oraz odpowiadające im schematy połączeń i tabele konfiguracyjne.
3.3.3.2.2. Typy wejść cyfrowych obsługiwane przez skrzynkę sterowniczą
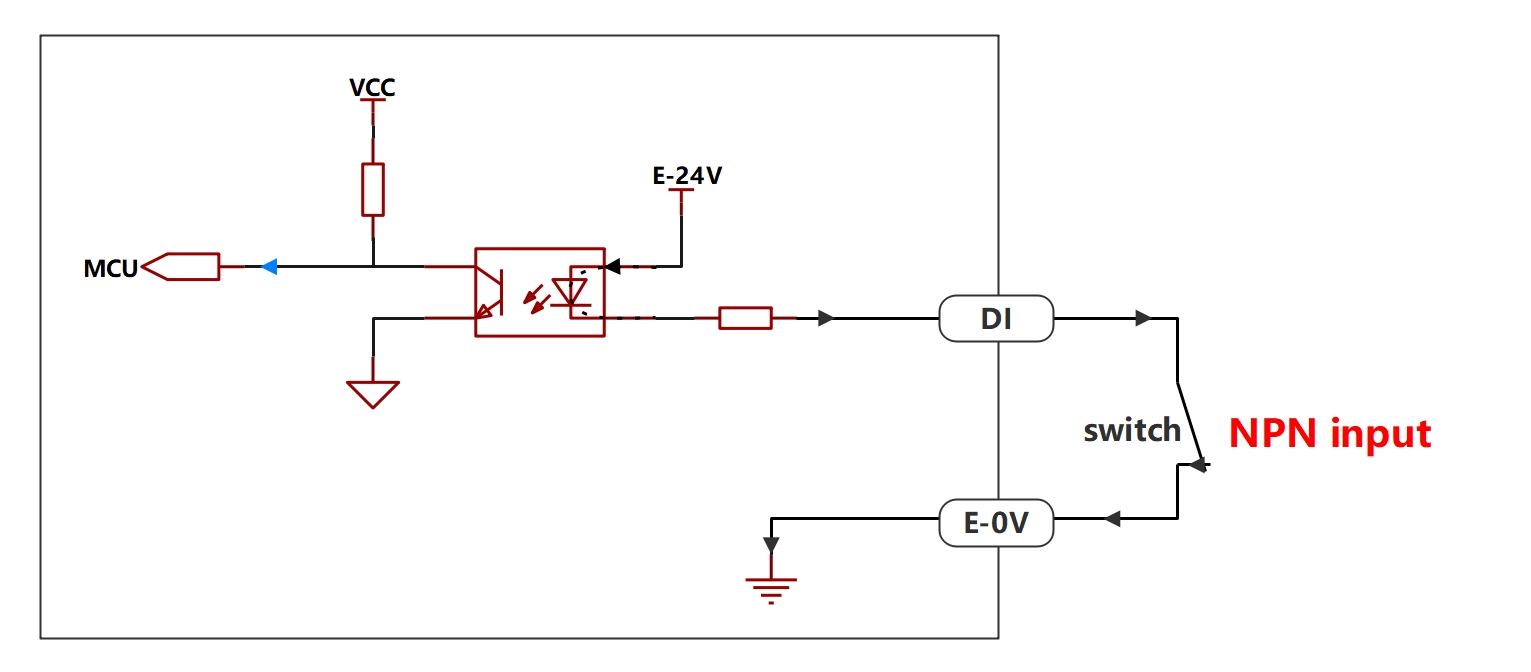
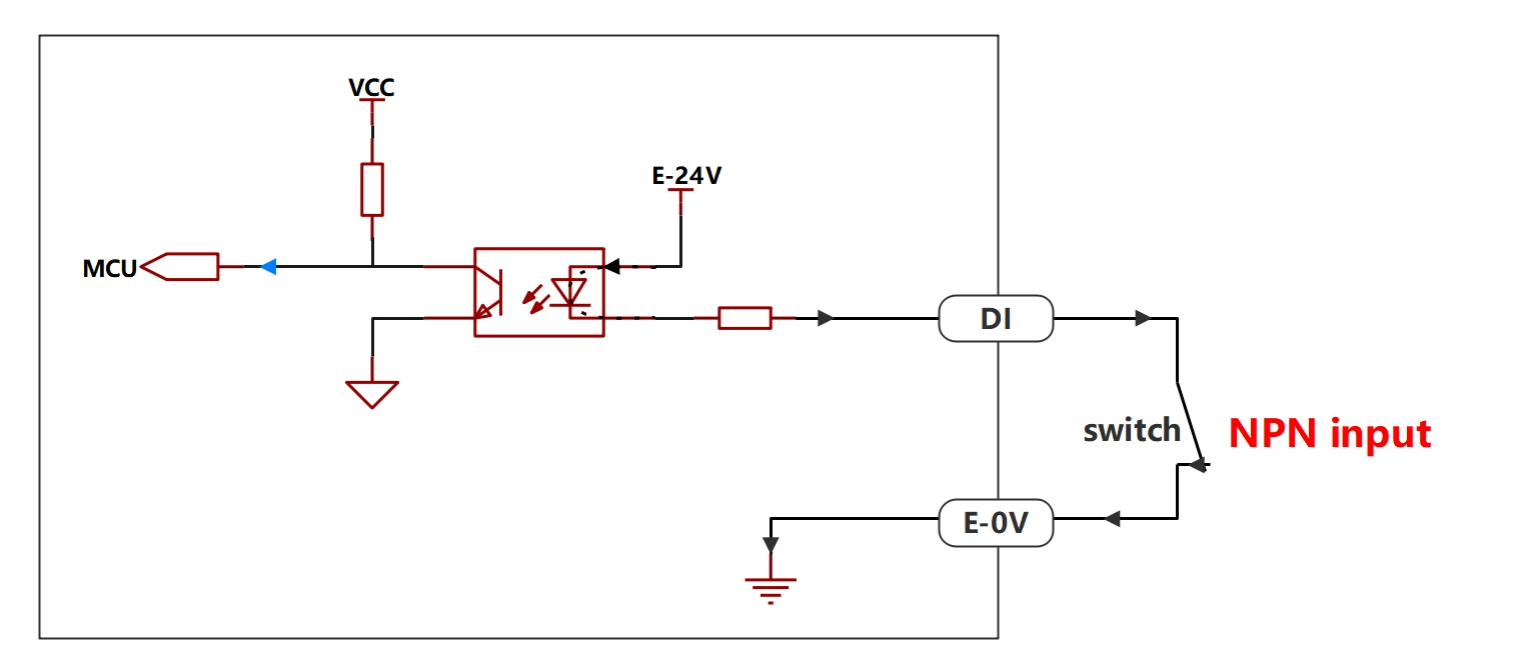
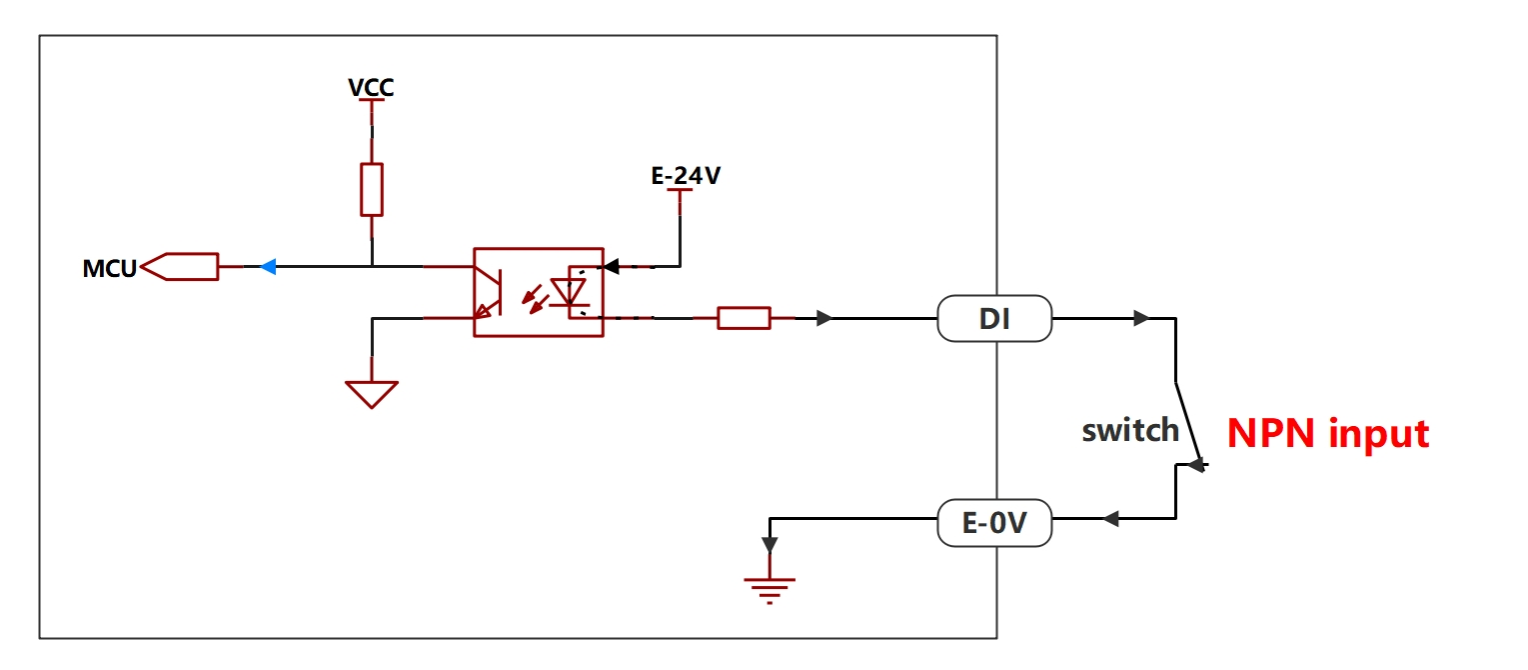
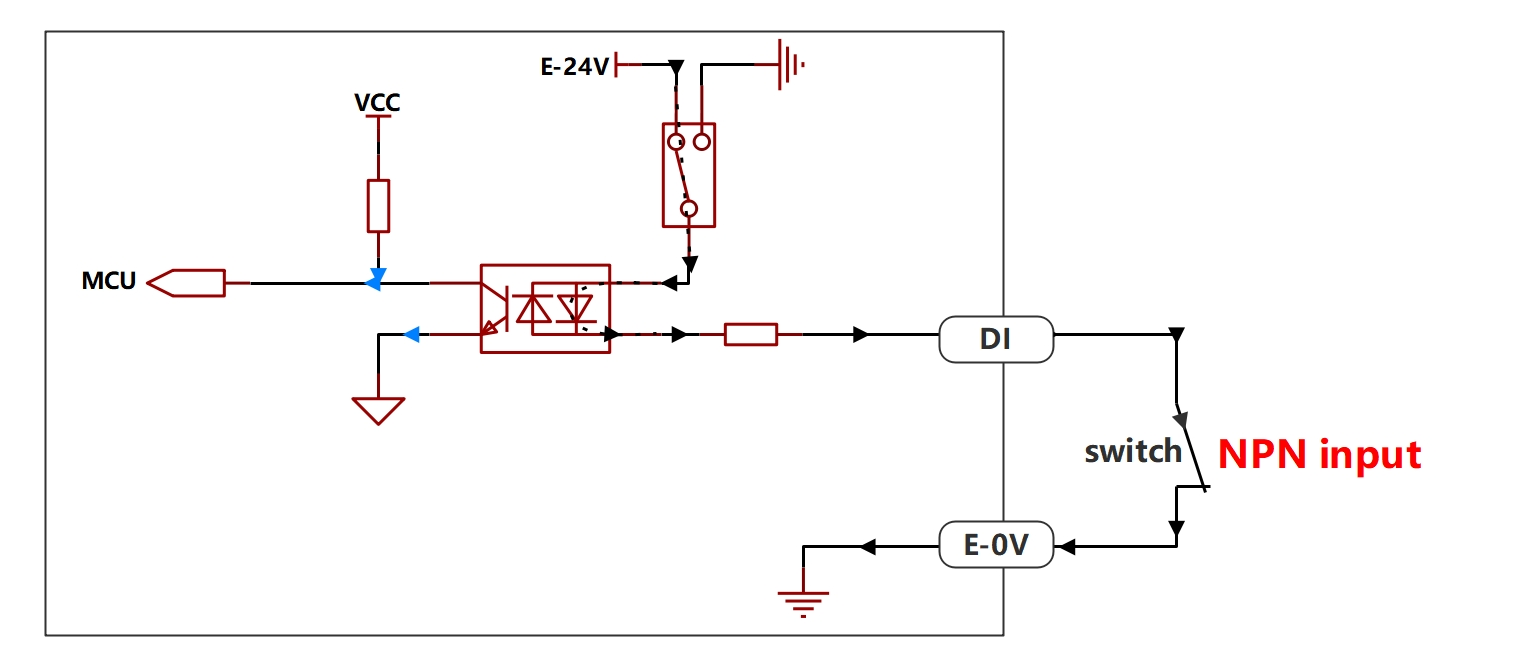
Cyfrowe wejścia skrzynki sterowniczej DC i skrzynki sterowniczej AC wąskie napięcie obsługują tylko wejścia typu NPN. Cyfrowe wejścia skrzynki sterowniczej AC szerokie napięcie obsługują wejścia typu NPN i PNP, domyślnym trybem fabrycznym jest typ NPN.
Cyfrowe wejścia skrzynki sterowniczej DC i skrzynki sterowniczej AC wąskie napięcie obsługują tylko wejścia typu NPN, a ich schemat połączeń jest następujący.
Wykres 3.3-2 Schemat połączeń cyfrowych wejść skrzynki sterowniczej DC i AC wąskie napięcie
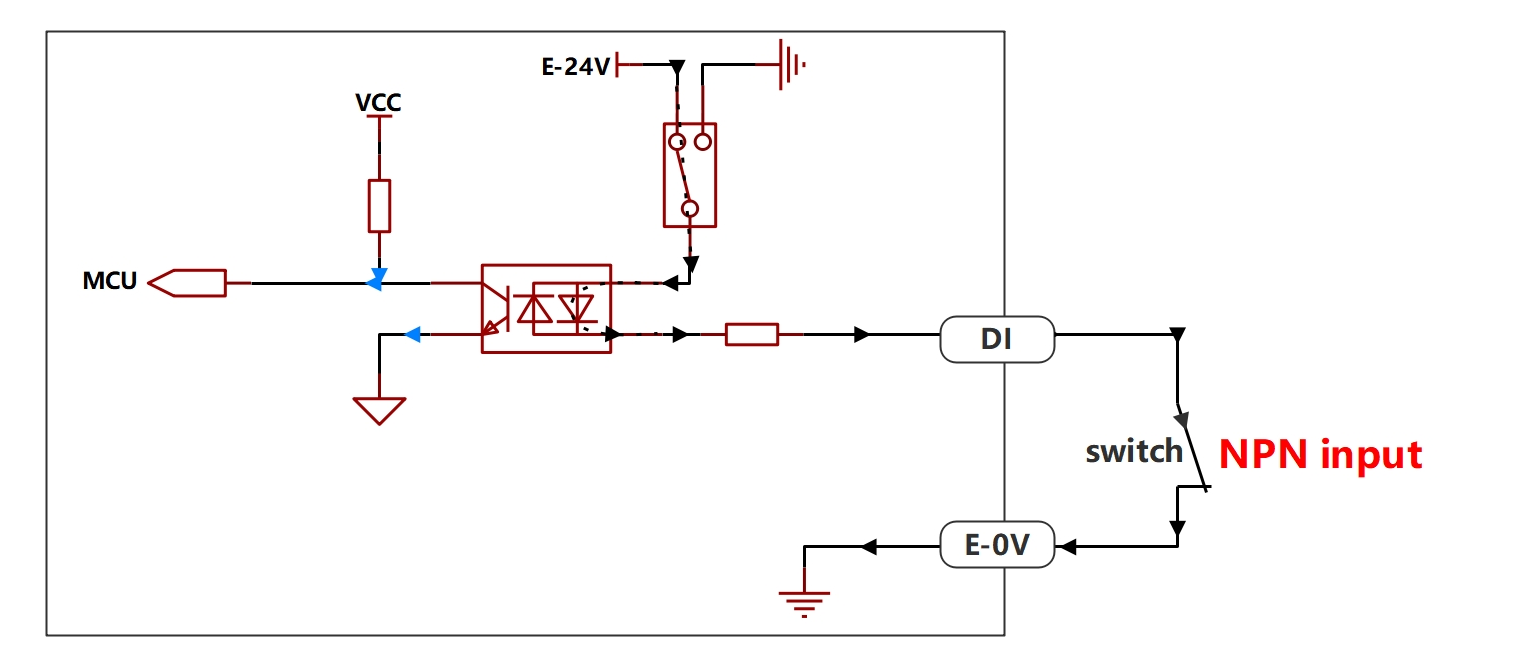
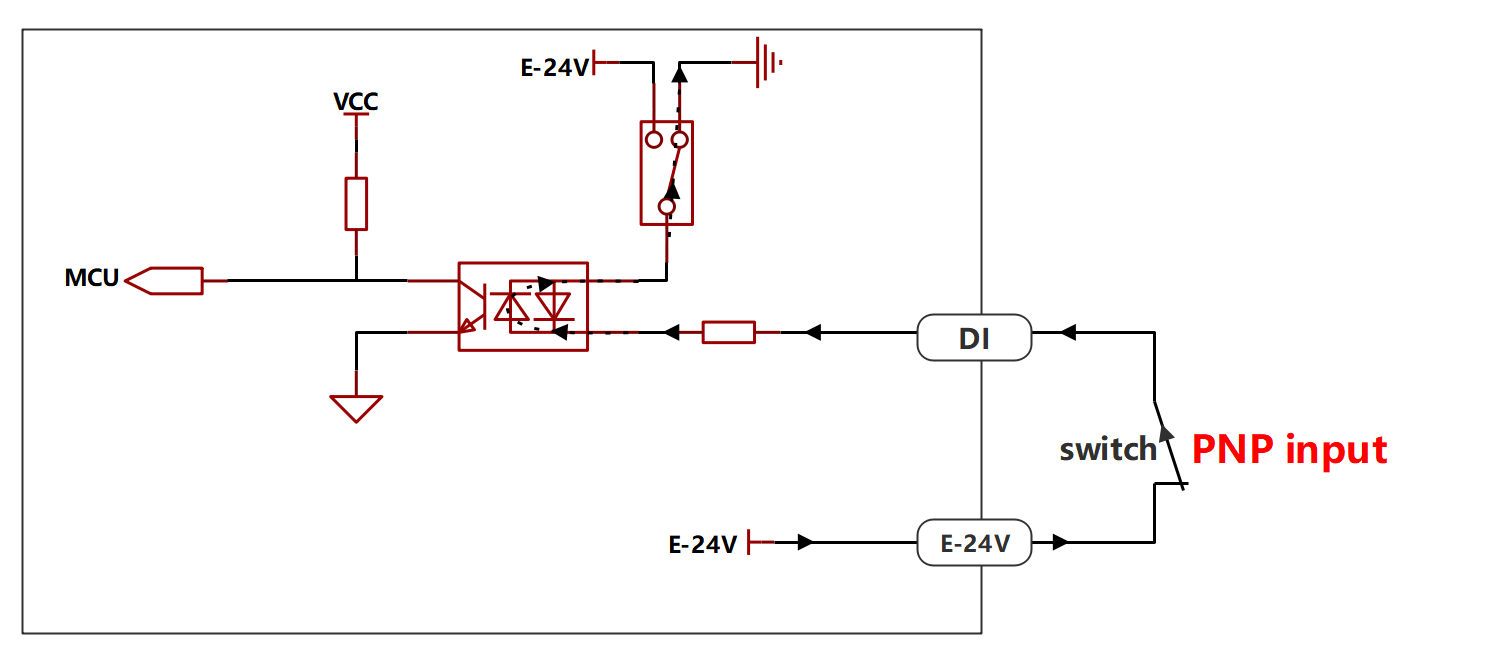
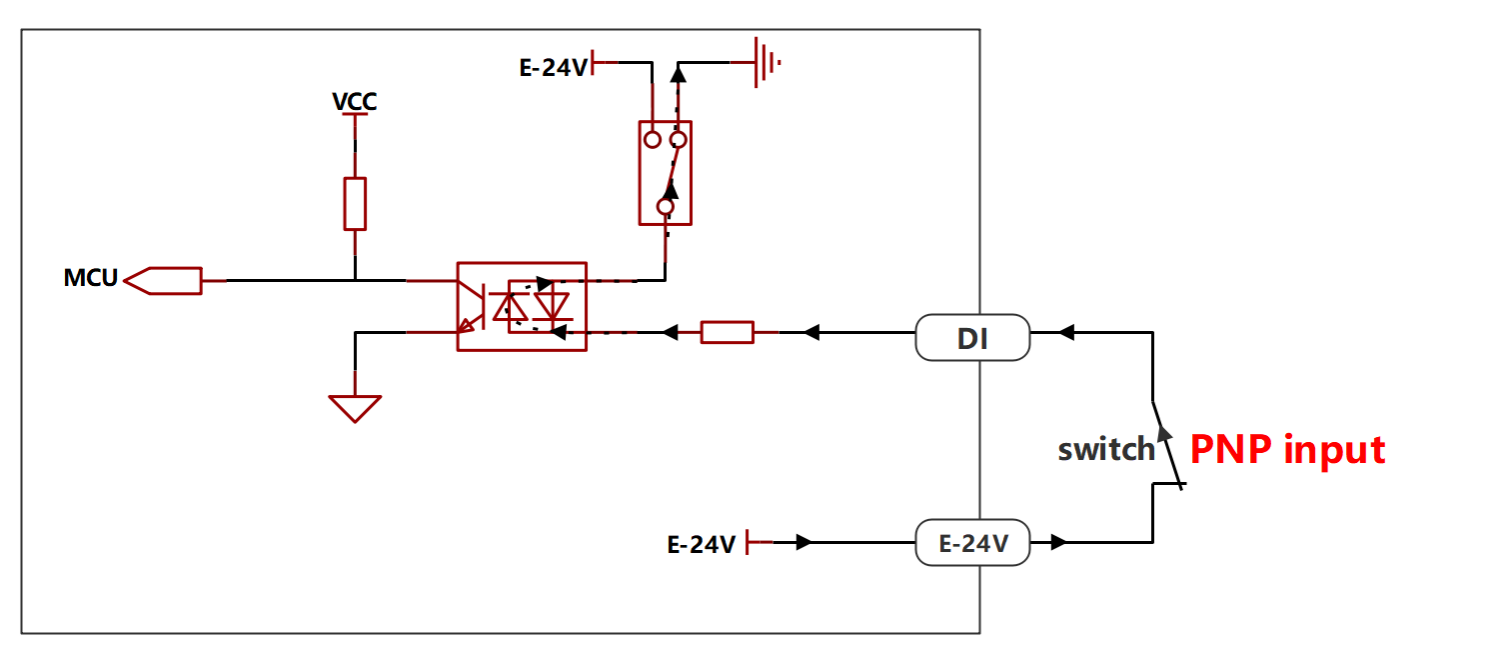
Cyfrowe wejścia skrzynki sterowniczej AC szerokie napięcie obsługują wejścia typu NPN i PNP, domyślnym trybem fabrycznym jest typ NPN. Ich schemat połączeń jest następujący:
Typ wejścia
Schemat połączeń
Wejście typu NPN
Wejście typu PNP
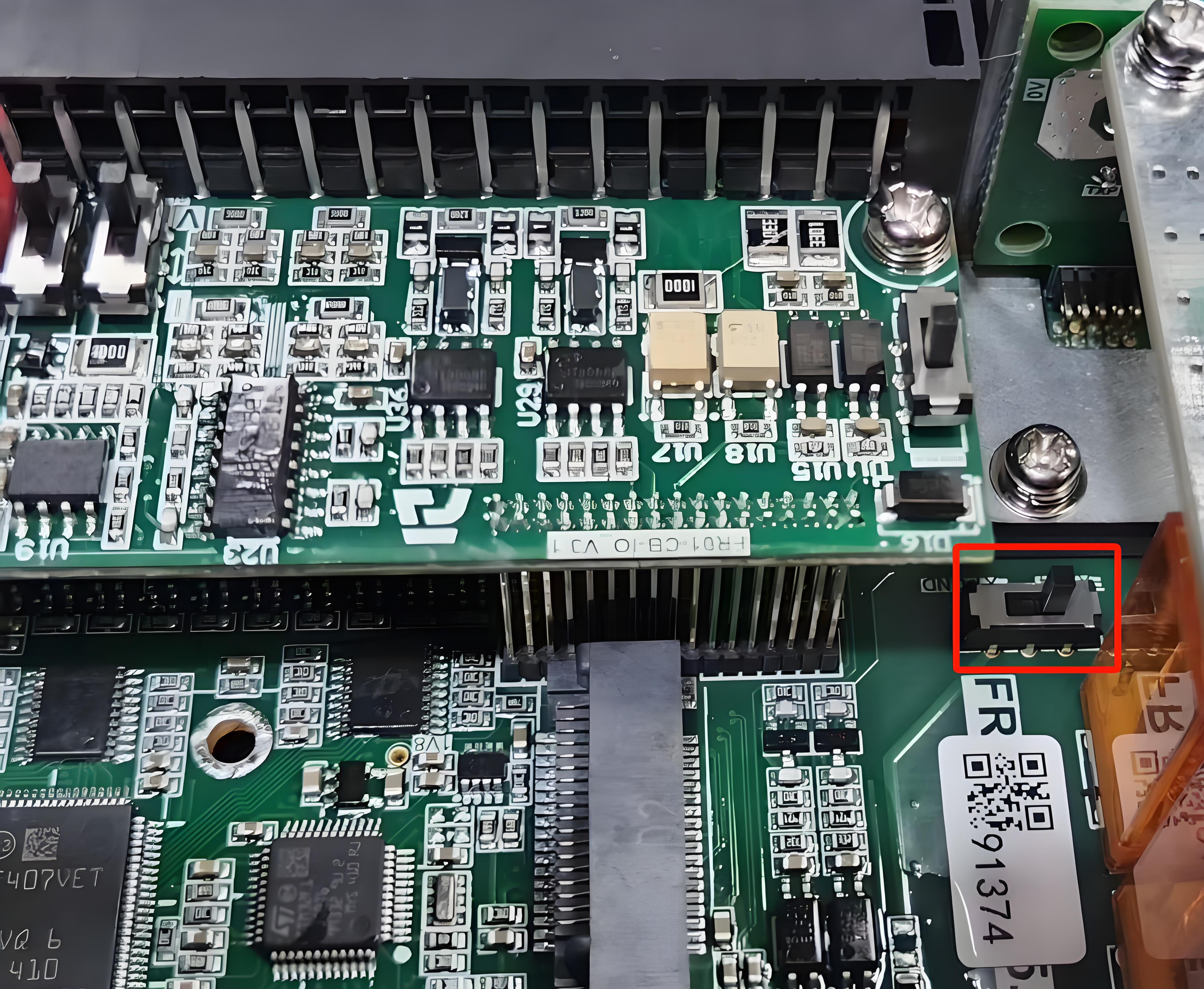
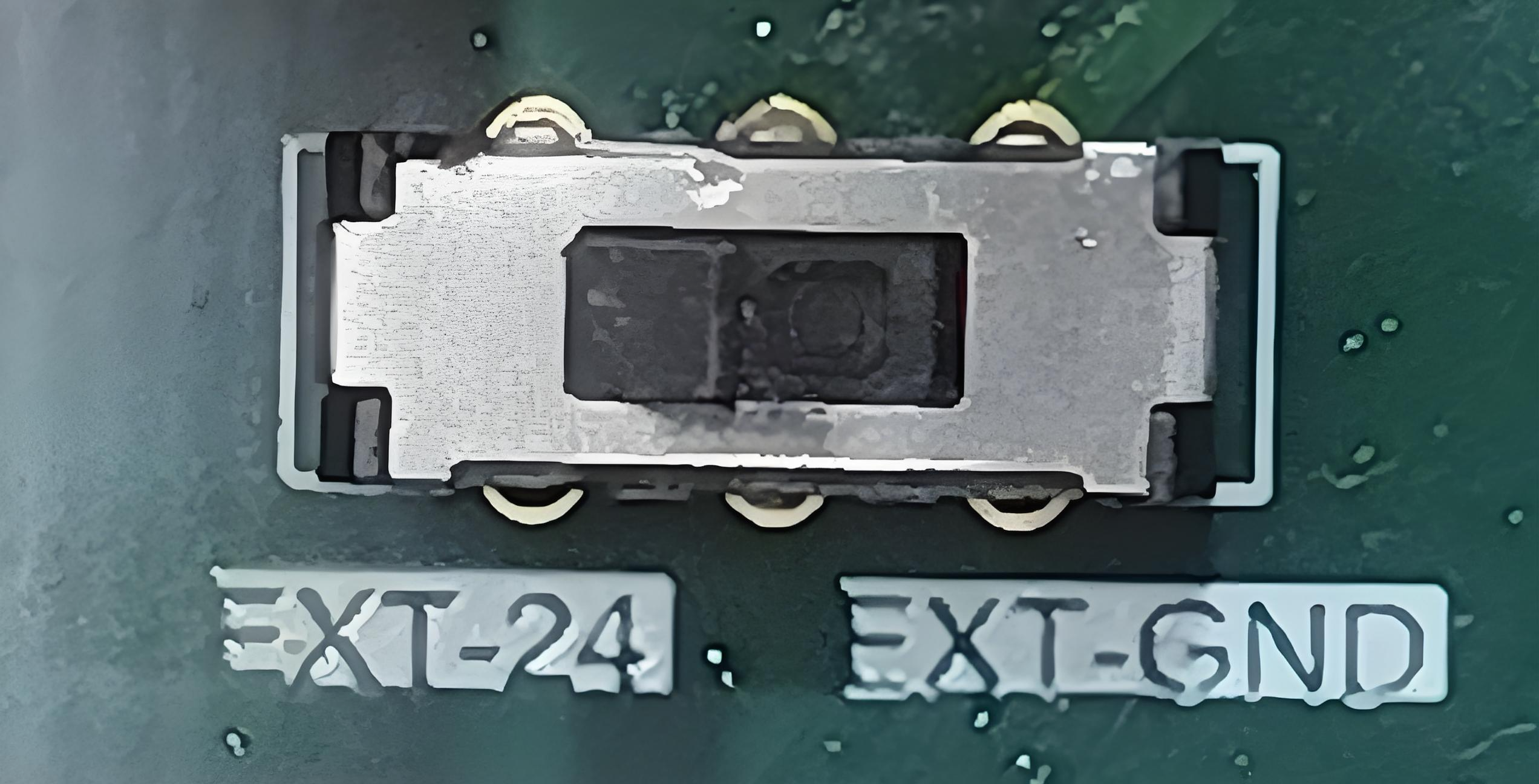
Typ wejścia cyfrowych wejść skrzynki sterowniczej szerokiego napięcia jest określany przez wewnętrzny przełącznik DIP skrzynki sterowniczej. Jeśli użytkownik chce zmienić typ wejścia, należy przestawić przełącznik DIP w odpowiednią pozycję.
Pozycja przełącznika DIP
Pozycja fizyczna przełącznika DIP
Wejście typu NPN
EX-24V
Wejście typu PNP
EX-0V
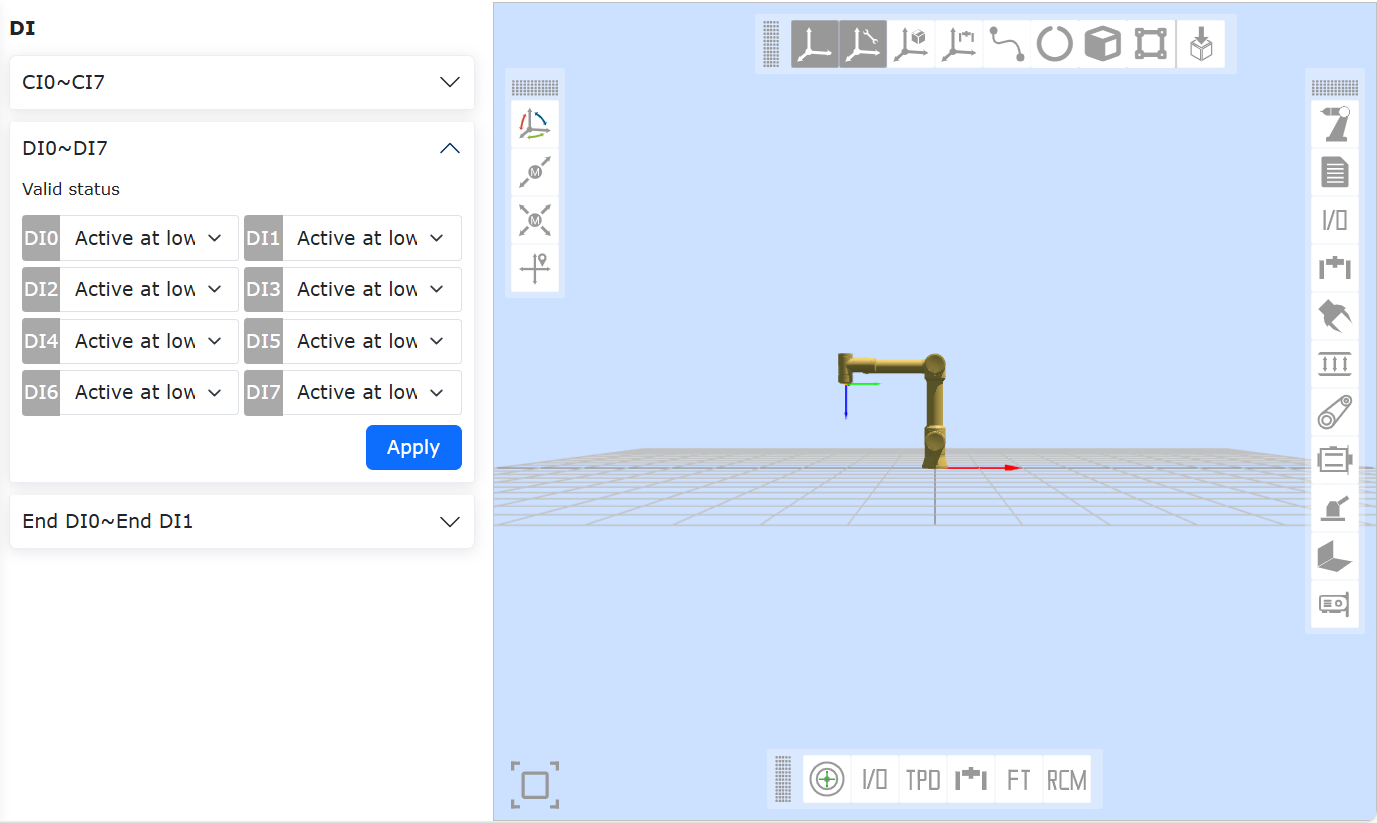
3.3.3.2.4. Ustawienia oprogramowania związane z cyfrowymi wejściami skrzynki sterowniczej
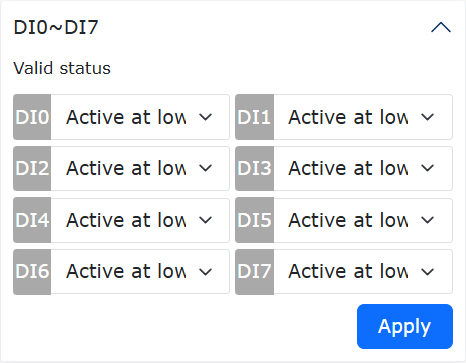
Pozycją ustawień oprogramowania dotyczących cyfrowych wejść jest tylko „Stan aktywny wejść DI0-DI7”, który określa wartość napięcia poziomu cyfrowego odpowiadającą aktywnemu wykrytemu wejściu. To ustawienie umożliwia użytkownikowi bardziej elastyczne korzystanie z wejść.
Wykres 3.3-3 Stan aktywny wejść DI0-DI7
Przy różnych ustawieniach „Stanu aktywnego wejść DI0-DI7” oraz gdy zewnętrzny przełącznik cyfrowego wejścia znajduje się w różnych stanach, tabela stanów aktywnych wykrywanych przez oprogramowanie przedstawia się następująco:
Tabela 3.3-2 Tabela stanów aktywnych
Typ skrzynki sterowniczej
Typ wejścia
Aktywny wysoki (styk zamknięty)
Aktywny wysoki (styk otwarty)
Aktywny niski (styk zamknięty)
Aktywny niski (styk otwarty)
Skrzynka sterownicza DC
Wejście typu NPN
Nieaktywny
Aktywny
Aktywny
Nieaktywny
Skrzynka sterownicza AC wąskie napięcie
Wejście typu NPN
Nieaktywny
Aktywny
Aktywny
Nieaktywny
Skrzynka sterownicza AC szerokie napięcie
Wejście typu NPN
Nieaktywny
Aktywny
Aktywny
Nieaktywny
Skrzynka sterownicza AC szerokie napięcie
Wejście typu PNP
Nieaktywny
Aktywny
Aktywny
Nieaktywny
3.3.3.3. Opis cyfrowych wyjść skrzynki sterowniczej
Poniżej wymieniono typy wyjść obsługiwane przez cyfrowe wyjścia zintegrowanej mini skrzynki sterowniczej robota FAIRINO oraz odpowiadające im schematy połączeń i tabele konfiguracyjne.
Wykres 3.3-4 Wyjście DO skrzynki sterowniczej podczas zasilania
3.3.3.3.2. Typy wyjść cyfrowych obsługiwane przez skrzynkę sterowniczą
Cyfrowe wyjścia skrzynki sterowniczej DC i skrzynki sterowniczej AC wąskie napięcie obsługują tylko wyjścia typu NPN. Cyfrowe wyjścia skrzynki sterowniczej AC szerokie napięcie obsługują wyjścia typu NPN i PNP. Ich wyjście ma strukturę push-pull. Wystarczy podłączyć zgodnie z odpowiednim schematem połączeń, nie są wymagane żadne specjalne ustawienia.
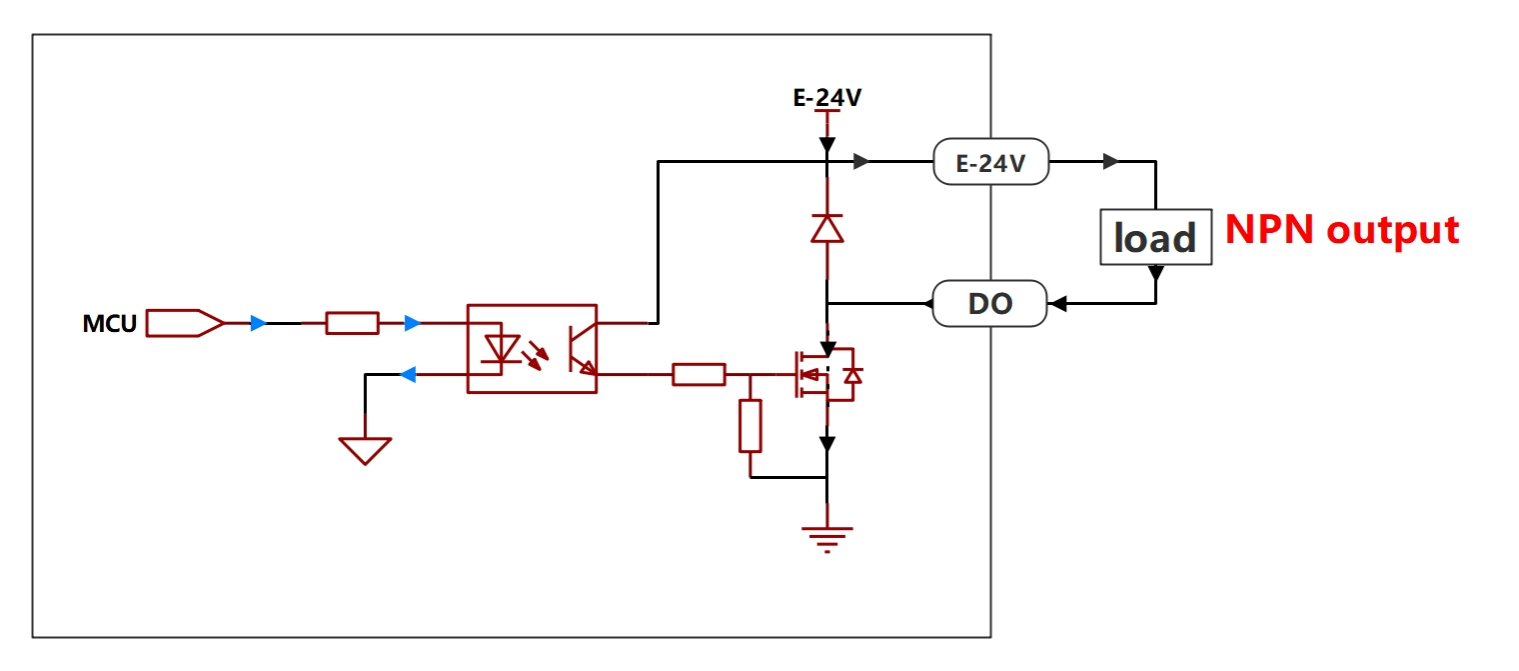
Cyfrowe wyjścia skrzynki sterowniczej DC i skrzynki sterowniczej AC wąskie napięcie obsługują tylko wyjścia typu NPN, a ich schemat połączeń jest następujący.
Wykres 3.3-6 Schemat połączeń cyfrowych wyjść skrzynki sterowniczej DC i AC wąskie napięcie
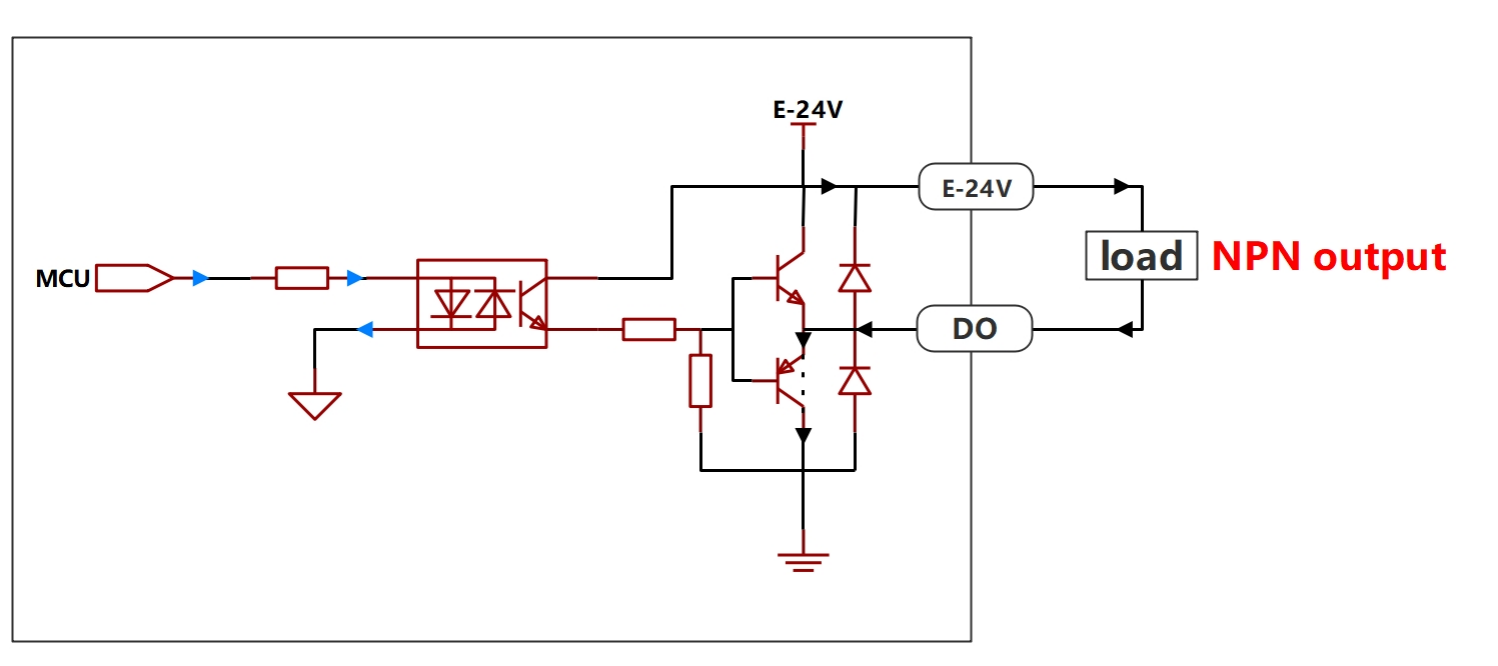
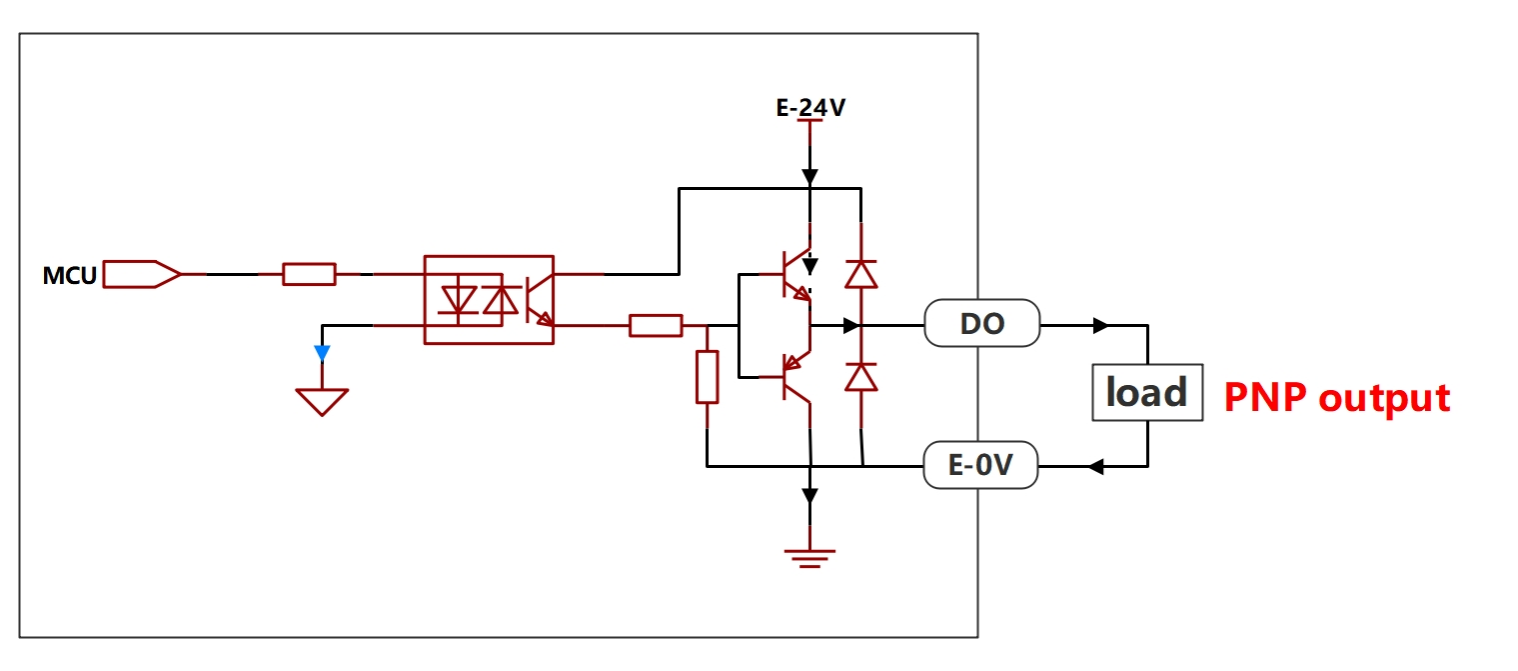
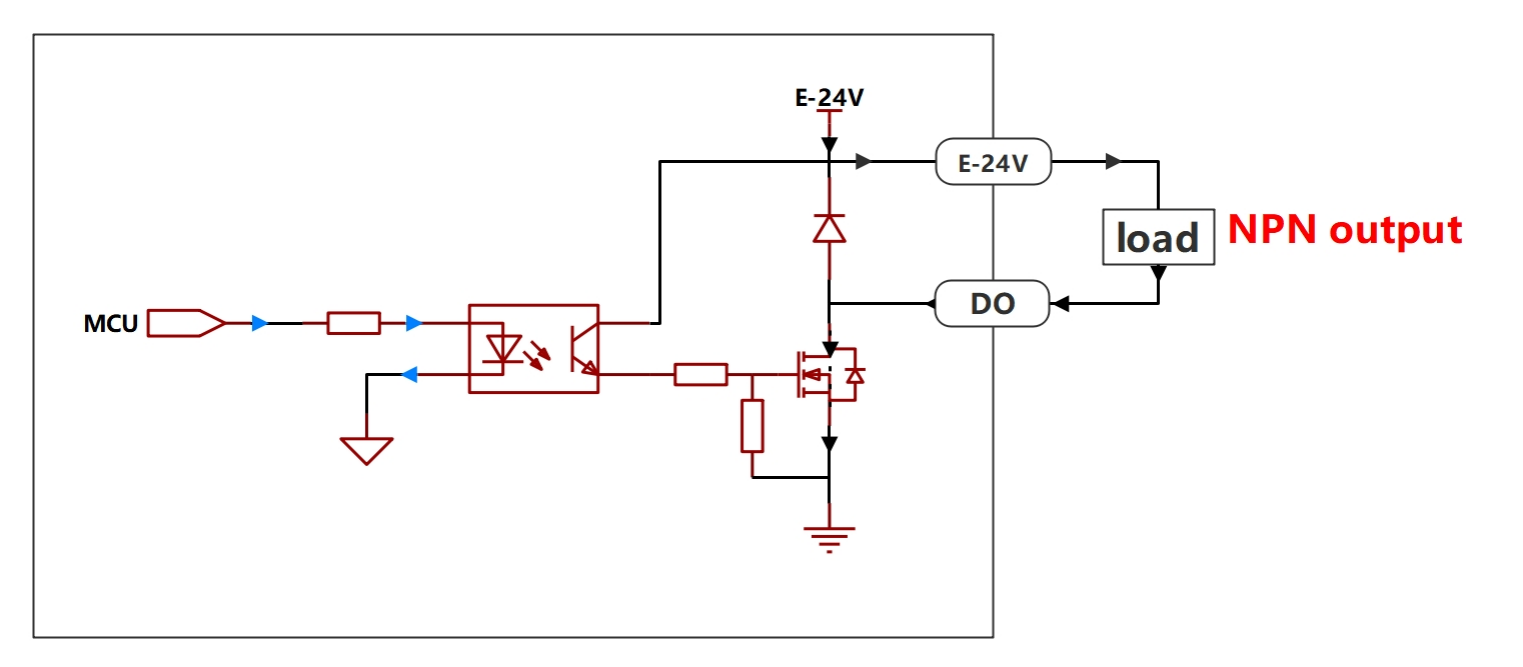
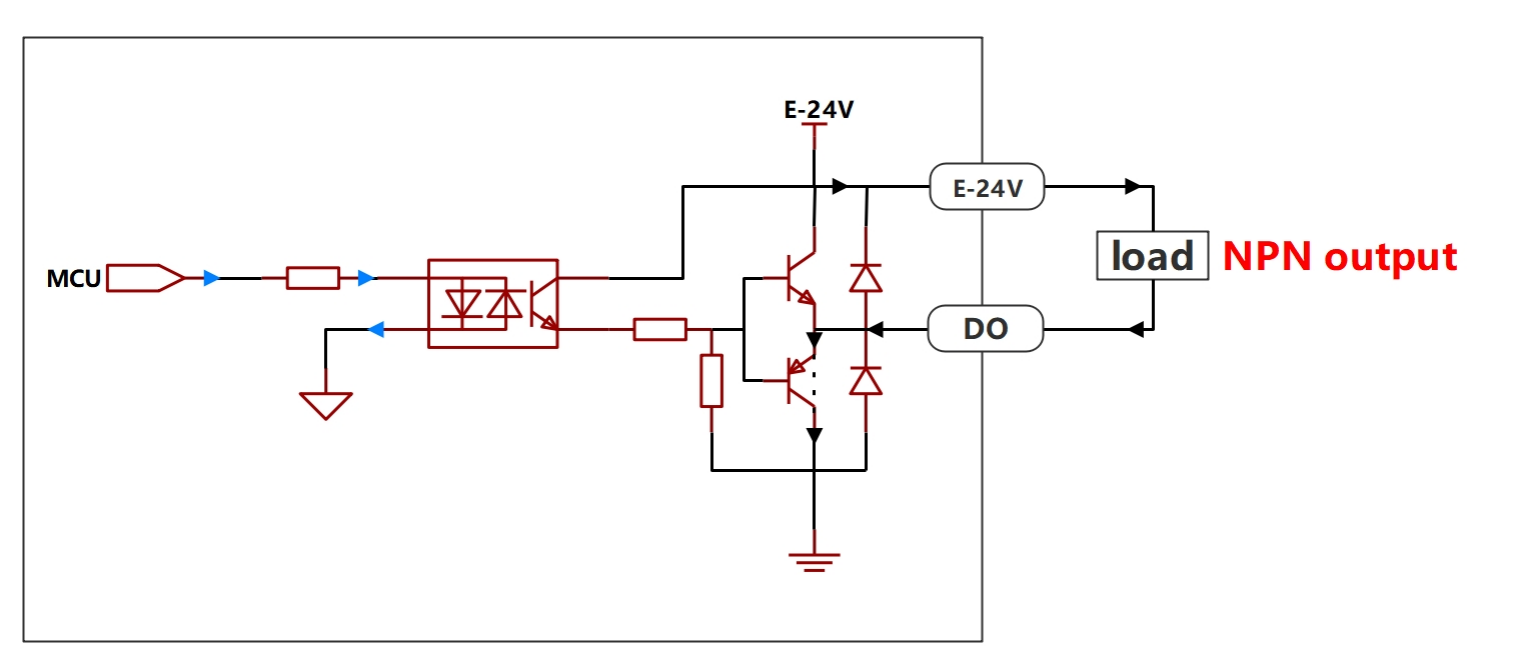
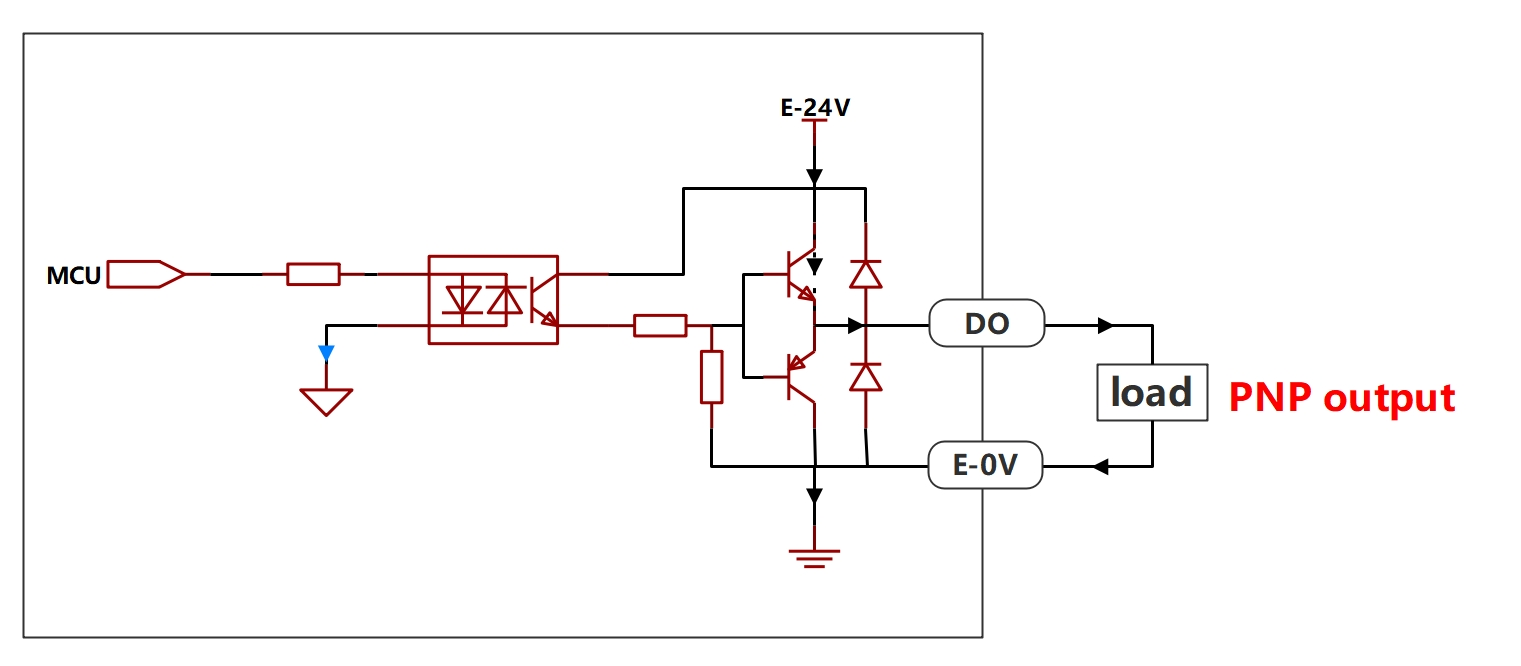
Cyfrowe wyjścia skrzynki sterowniczej AC szerokie napięcie obsługują typy NPN i PNP. Ich schemat połączeń jest następujący:
Typ wejścia
Schemat połączeń
Wejście typu NPN
Wejście typu PNP
3.3.3.3.4. Ustawienia oprogramowania związane z cyfrowymi wyjściami skrzynki sterowniczej
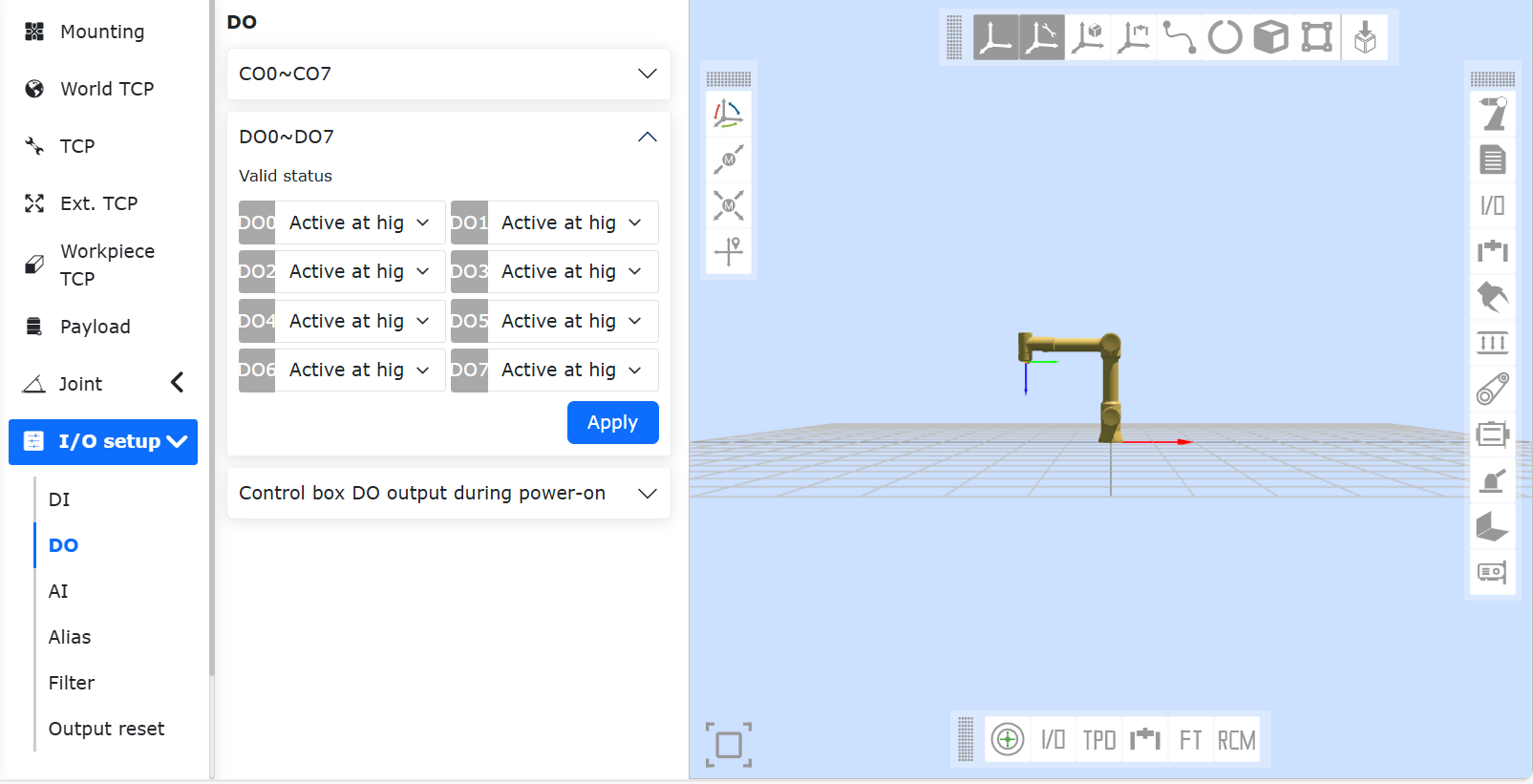
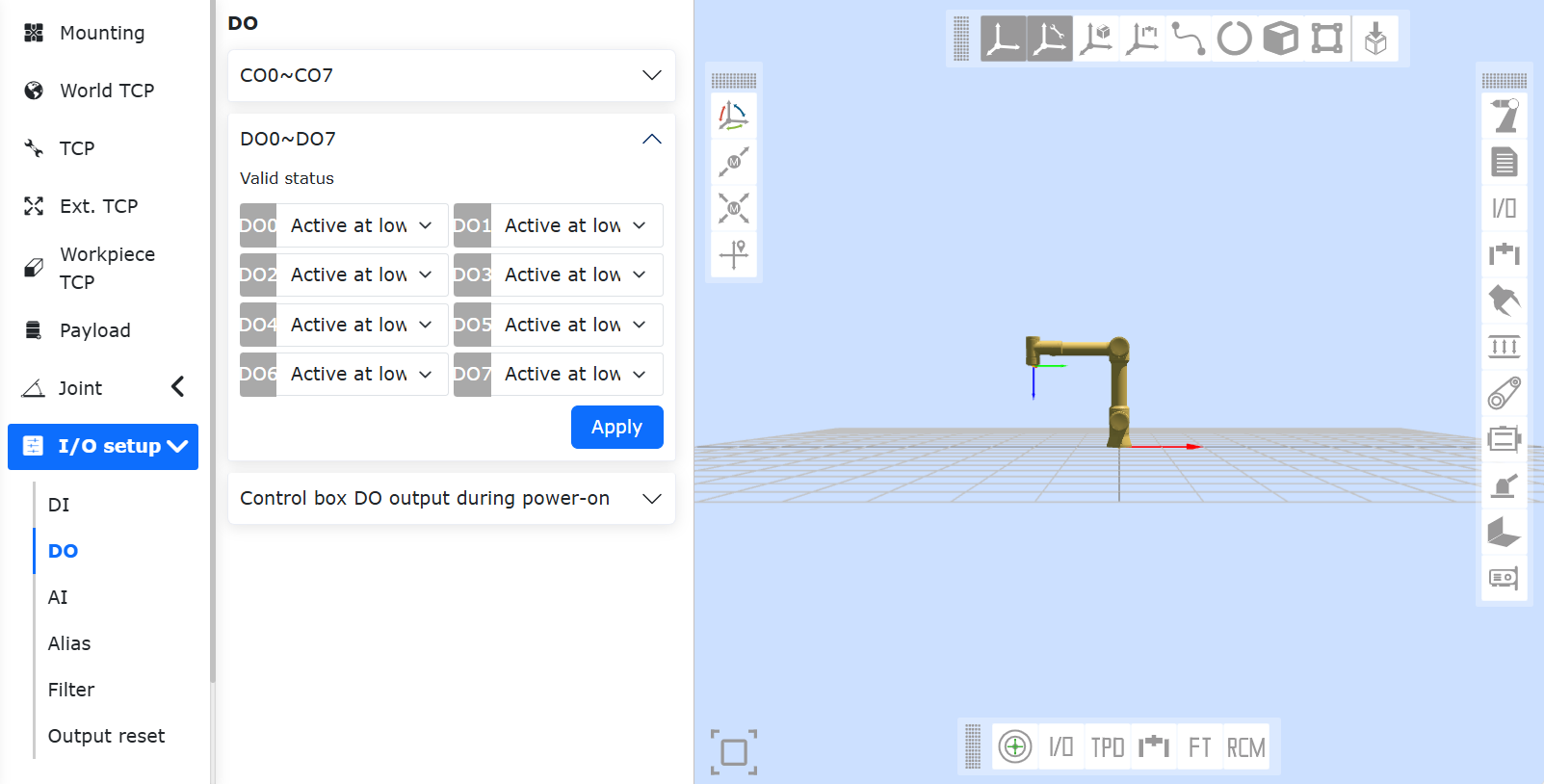
Pozycje ustawień oprogramowania dotyczących cyfrowych wyjść to „Wyjście DO skrzynki sterowniczej podczas zasilania” oraz „Stan aktywny wyjść DO0-DO7”. „Wyjście DO skrzynki sterowniczej podczas zasilania” określa poziom wyjściowy podczas zasilania skrzynki sterowniczej, gdy system sterowania nie został jeszcze zainicjowany. Może to odpowiadać różnym aktywnym stanom wyjściowym, co pozwala elastycznie radzić sobie z sytuacjami, w których wymagany jest określony stan wyjściowy podczas zasilania. „Stan aktywny wyjść DO0-DO7” określa wartość napięcia wyjściowego, które ma być sterowane, gdy wyjście jest aktywne. To ustawienie umożliwia użytkownikowi bardziej elastyczne korzystanie z wyjść.
Przy różnych ustawieniach „Wyjścia DO skrzynki sterowniczej podczas zasilania”, tabela stanów aktywnych wyjść cyfrowych przedstawia się następująco:
Wykres 3.3-7 Wyjście DO skrzynki sterowniczej podczas zasilania
Tabela 3.3-5 Tabela stanów aktywnych
Typ skrzynki sterowniczej
Typ wejścia
Aktywny wysoki (ustawienie włączone)
Aktywny wysoki (ustawienie wyłączone)
Aktywny niski (ustawienie włączone)
Aktywny niski (ustawienie wyłączone)
Skrzynka sterownicza DC
Wyjście typu NPN
Aktywny
Aktywny
Nieaktywny
Nieaktywny
Skrzynka sterownicza AC wąskie napięcie
Wyjście typu NPN
Aktywny
Aktywny
Nieaktywny
Nieaktywny
Skrzynka sterownicza AC szerokie napięcie
Wyjście typu NPN
Aktywny
Aktywny
Nieaktywny
Nieaktywny
Skrzynka sterownicza AC szerokie napięcie
Wyjście typu PNP
Aktywny
Aktywny
Nieaktywny
Nieaktywny
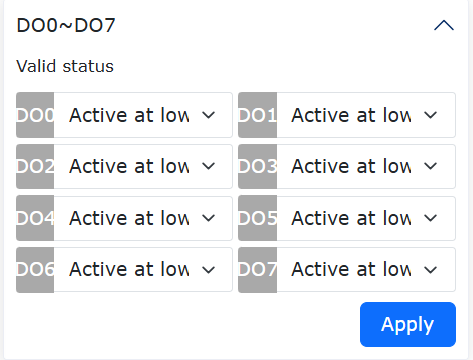
Przy różnych ustawieniach „Stanu aktywnego wyjść DO0-DO7”, tabela stanów aktywnych wyjść cyfrowych przedstawia się następująco:
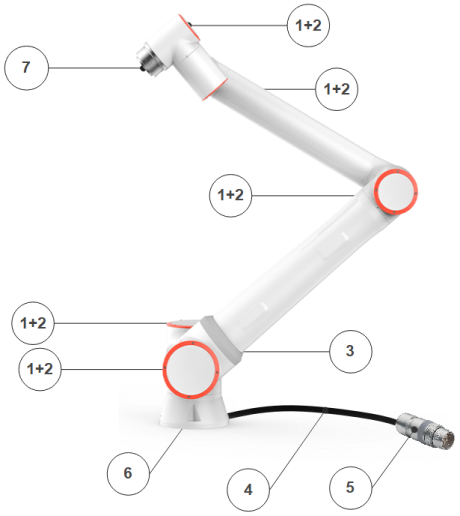
Poniżej wymieniono listę kontrolną zalecaną przez FAIRINO do wykonywania w zalecanych odstępach czasu. Jeśli podczas przeglądu okaże się, że stan odpowiednich części jest nieodpowiedni, należy go natychmiast skorygować.
Informacja
F = Kontrola funkcjonalna, V = Kontrola wzrokowa, * = Należy sprawdzić po poważnej kolizji.
Element do sprawdzenia
Wymaganie
Co miesiąc
Co pół roku
Co rok
1
Sprawdź tylną pokrywę stawu*
V
✔
2
Sprawdź śruby tylnej pokrywy stawu
F
✔
3
Sprawdź gumowe pierścienie stawu
V
✔
4
Sprawdź kable robota
V
✔
5
Sprawdź połączenia kabli robota
V
✔
6
Sprawdź śruby montażowe podstawy robota*
F
✔
7
Sprawdź śruby montażowe narzędzia końcowego*
F
✔
Kontrola wzrokowa
Informacja
Nigdy nie używaj sprężonego powietrza do czyszczenia ramienia robota, ponieważ może to uszkodzić elementy. Nie przechowuj robota dłużej niż 6 miesięcy bez przeprowadzenia kontroli wzrokowej.
Jeśli to możliwe, przesuń ramię robota do pozycji zerowej.
Wyłącz i odłącz przewód zasilający skrzynki sterowniczej.
Sprawdź kabel między skrzynką sterowniczą a ramieniem robota pod kątem uszkodzeń.
Sprawdź, czy śruby montażowe podstawy są prawidłowo dokręcone.
Sprawdź, czy śruby kołnierza narzędziowego są prawidłowo dokręcone.
Sprawdź, czy pierścienie płaskie nie są zużyte lub uszkodzone.
Sprawdź wszystkie tylne pokrywy stawów pod kątem pęknięć lub uszkodzeń.
Sprawdź, czy śruby mocujące tylne pokrywy stawów są na miejscu i prawidłowo dokręcone.
Informacja
Jeśli robot ulegnie uszkodzeniu w okresie gwarancji, skontaktuj się z dystrybutorem, u którego robot został zakupiony.
Kontrola funkcjonalna
Celem kontroli funkcjonalnej jest zapewnienie, że śruby, wkręty, narzędzia i ramię mechaniczne nie są poluzowane. Śruby/wkręty wymienione w planie kontroli należy sprawdzić za pomocą klucza dynamometrycznego, a moment dokręcania powinien być zgodny ze standardowymi specyfikacjami. Specyfikacje śrub montażowych ramienia mechanicznego można znaleźć w specyfikacjach instalacji w instrukcji użytkownika.
Czyszczenie
Do usunięcia zaobserwowanego kurzu/brudu/oleju z ramienia robota można użyć szmatki i jednego z następujących środków czyszczących: woda, alkohol izopropylowy, 10% etanol lub 10% nafta. Jeśli robot pracuje w trudnych warunkach, takich jak płyn do cięcia, chłodziwo itp., zaleca się regularne czyszczenie lub wymianę gumowych pierścieni.
Nie używaj wybielacza. Nie używaj wybielacza w żadnym rozcieńczonym roztworze czyszczącym. W rzadkich przypadkach można zaobserwować bardzo małe ilości smaru wydobywającego się ze złączy. Nie wpływa to na funkcję, użytkowanie lub żywotność stawu.
Poniżej wymieniono listę kontrolną zalecaną przez FAIRINO do wykonywania w zalecanych odstępach czasu. Jeśli podczas przeglądu okaże się, że stan odpowiednich części jest nieodpowiedni, należy go natychmiast skorygować.
Informacja
F = Kontrola funkcjonalna, V = Kontrola wzrokowa.
Element do sprawdzenia
Wymaganie
Co miesiąc
Co pół roku
Co rok
1
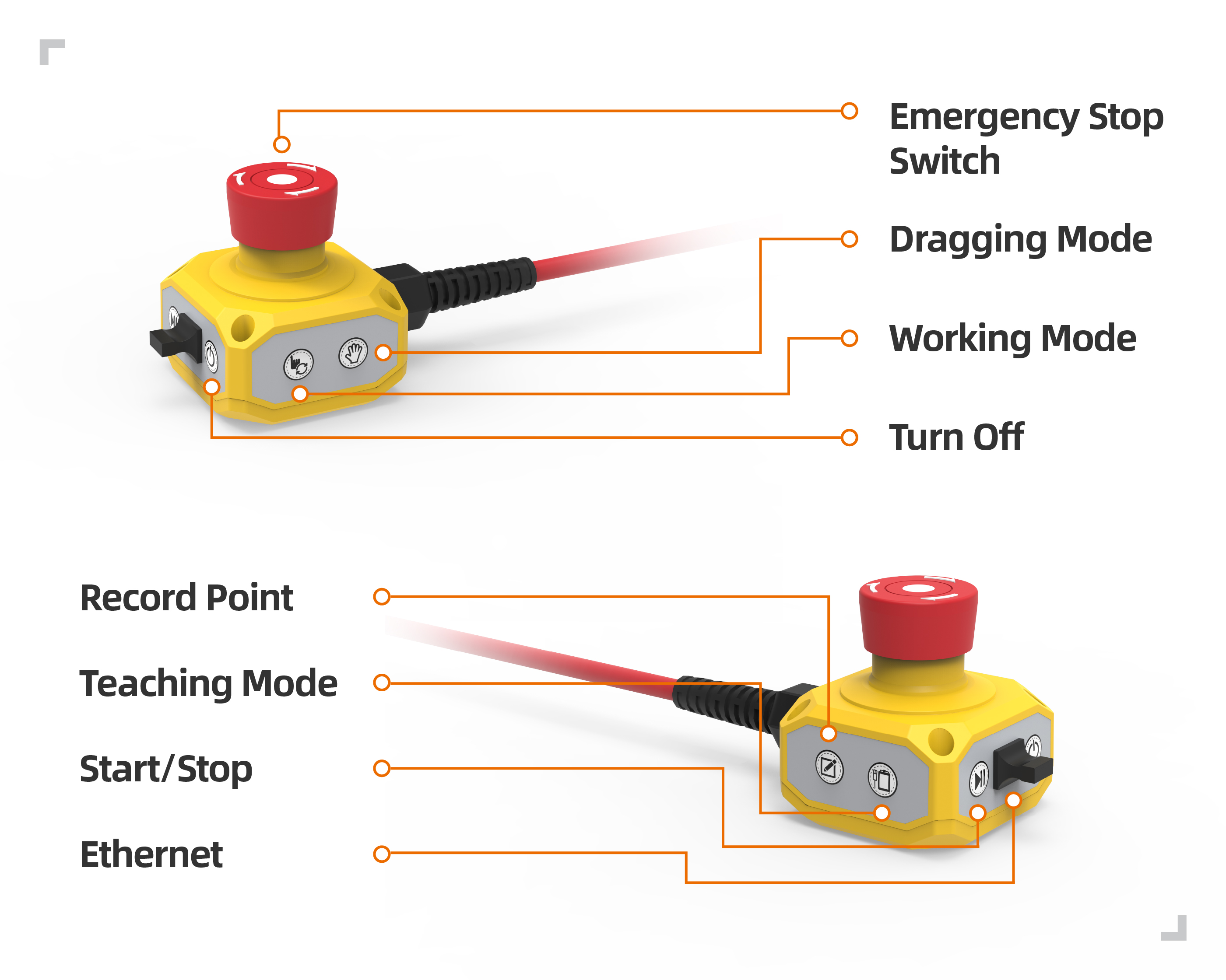
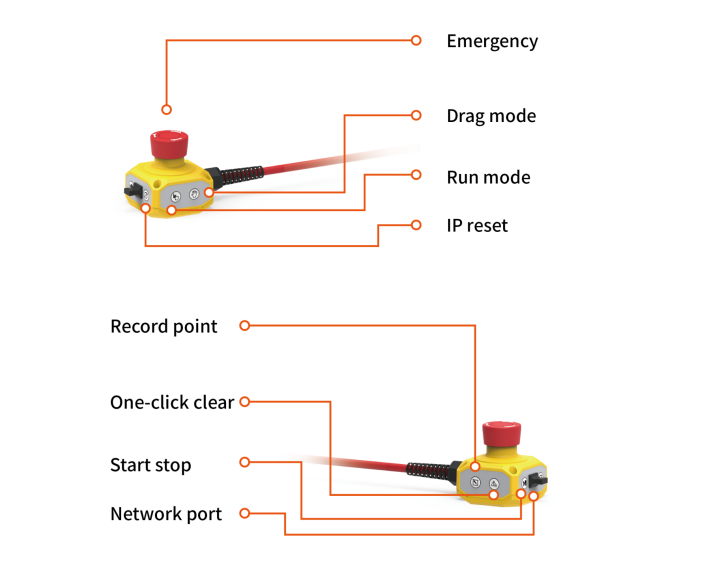
Sprawdź przycisk awaryjnego zatrzymania na panelu przyciskowym (panel operatorski)
F
✔
2
Sprawdź funkcje bezpiecznych wejść/wyjść na listwie zaciskowej
F
✔
3
Sprawdź funkcje uruchamiania/zatrzymywania i przełączania trybu na panelu przyciskowym
Odłącz przewód zasilający od skrzynki sterowniczej.
Sprawdź, czy zaciski płyty sterującej są prawidłowo włożone i czy nie ma poluzowanych przewodów.
Sprawdź, czy wewnątrz skrzynki sterowniczej nie ma brudu/kurzu. W razie potrzeby wyczyść za pomocą odkurzacza ESD.
Informacja
Nigdy nie używaj sprężonego powietrza do czyszczenia wnętrza skrzynki sterowniczej, ponieważ może to uszkodzić elementy.
Kontrola funkcjonalna
Informacja
Funkcje bezpieczeństwa robota są kluczowe. Zaleca się comiesięczne testowanie w celu zapewnienia prawidłowego działania.
Przycisk awaryjnego zatrzymania na panelu operatorskim/panelu przyciskowym:
Naciśnij przycisk awaryjnego zatrzymania na panelu operatorskim/panelu przyciskowym.
Obserwuj, czy robot zatrzymuje się i czy zasilanie stawów jest wyłączone.
Włącz ponownie zasilanie robota.
Inne bezpieczne wejścia i wyjścia nadal działają
Sprawdź, które bezpieczne wejścia i wyjścia są aktywne i czy mogą być wyzwalane przez PolyScope lub urządzenia zewnętrzne.
Data i zegar
Sprawdź, czy data i zegar na karcie „Dziennik” są prawidłowe. Nieprawidłowa data i zegar wskazują na niski poziom baterii CMOS. Bateria CMOS ma żywotność do 5 lat.
Sprawdź, czy zatrzaski listwy zaciskowej są prawidłowo zablokowane
Czyszczenie
Panel operatorski
Może wymagać czyszczenia ekranu panelu operatorskiego. Zaleca się używanie standardowych, łagodnych środków czyszczących przeznaczonych do użytku przemysłowego, które nie zawierają rozcieńczalników ani żadnych agresywnych dodatków. Nie używaj szorstkich materiałów do wycierania ekranu. FAIRINO nie promuje żadnych konkretnych środków czyszczących.
Panel przyciskowy panelu operatorskiego
Regularne czyszczenie nie jest wymagane w normalnych warunkach. Jeśli oznaczenia przycisków staną się nieczytelne i utrudnią identyfikację, w każdej chwili można je wyczyścić środkiem czyszczącym.
Skrzynka sterownicza
Skrzynka sterownicza zawiera dwa filtry, po jednym z każdej strony skrzynki sterowniczej.
Stan filtrów można sprawdzić przez otwory wentylacyjne po lewej i prawej stronie skrzynki sterowniczej. W normalnych warunkach widoczna jest struktura plastra miodu filtra.
Wyjmij filtr do czyszczenia. Użyj niskociśnieniowego powietrza do czyszczenia lub wymień filtr w razie potrzeby. Pamiętaj o wyczyszczeniu każdej strony. Jeśli filtr jest bardzo brudny lub uszkodzony, wymień go (w celu wymiany należy zdjąć górną pokrywę kontrolera i wymienić filtr od wewnątrz górnej pokrywy).
Podczas pracy posłuchaj dźwięku wentylatora. Jeśli dźwięk jest nieprawidłowy, skontaktuj się z dostawcą usług lub wymień.
Zaleca się, aby podstawa montażowa robota spełniała następujące wymagania, zapewniając solidne i stabilne zamocowanie robota:
Podstawa montażowa robota musi być wystarczająco wytrzymała i mieć odpowiednią nośność. Powinna wytrzymać co najmniej 5-krotność ciężaru robota i co najmniej 10-krotność momentu obrotowego osi 1.
Powierzchnia podstawy montażowej robota powinna być płaska, aby zapewnić ścisły kontakt z powierzchnią robota.
Podstawa montażowa robota powinna być wystarczająco sztywna, solidnie zamocowana i nie może rezonować z robotem.
Gdy robot i inne elementy poruszają się jednocześnie, podstawa montażowa powinna być odizolowana od innych ruchomych części, nie należy ich mocować razem, aby uniknąć zakłóceń wibracyjnych podczas ruchu.
Jeśli robot jest zainstalowany na ruchomej platformie lub zewnętrznej osi, przyspieszenie ruchomej platformy lub zewnętrznej osi powinno być tak niskie, jak to możliwe.
Ostrzeżenie
Należy unikać następujących sposobów instalacji:
Unikaj mocowania robota do innych ruchomych urządzeń.
Wykres 3.4-1 Unikanie instalacji na innych ruchomych urządzeniach
Upewnij się, że ramię robota jest prawidłowo i bezpiecznie zamocowane. Niestabilna instalacja może prowadzić do wypadków.
Informacja
Można zakupić precyzyjną podstawę jako akcesorium. Wykresy 3.4-2, 3.4-5, 3.4-8, 3.4-11 pokazują lokalizacje otworów kołkowych i śrub montażowych.
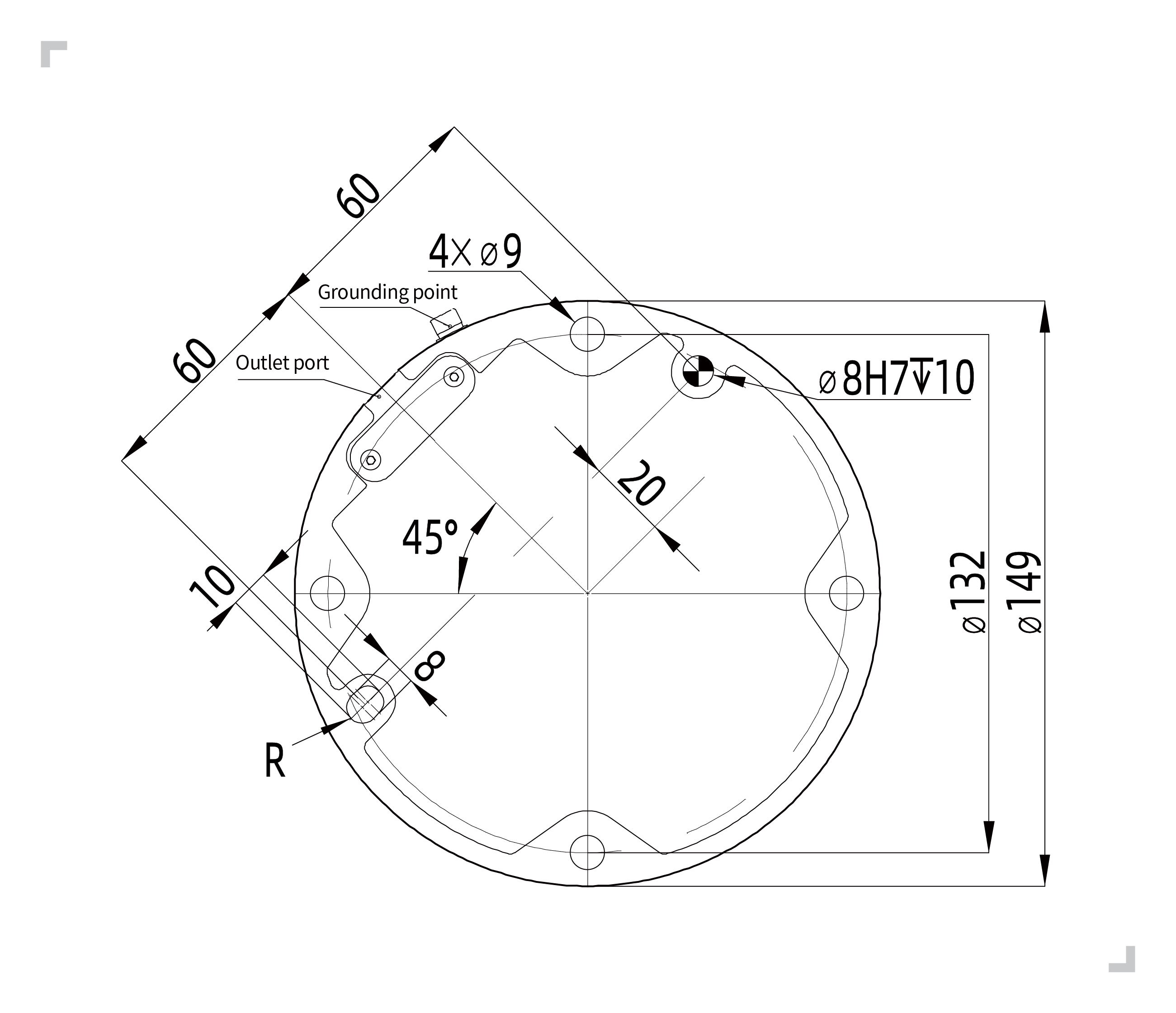
3.4.1.1. Wymagania instalacji ramienia robota FR3/FR3-WMS/FR3-WML/FR3-C/FR5-C
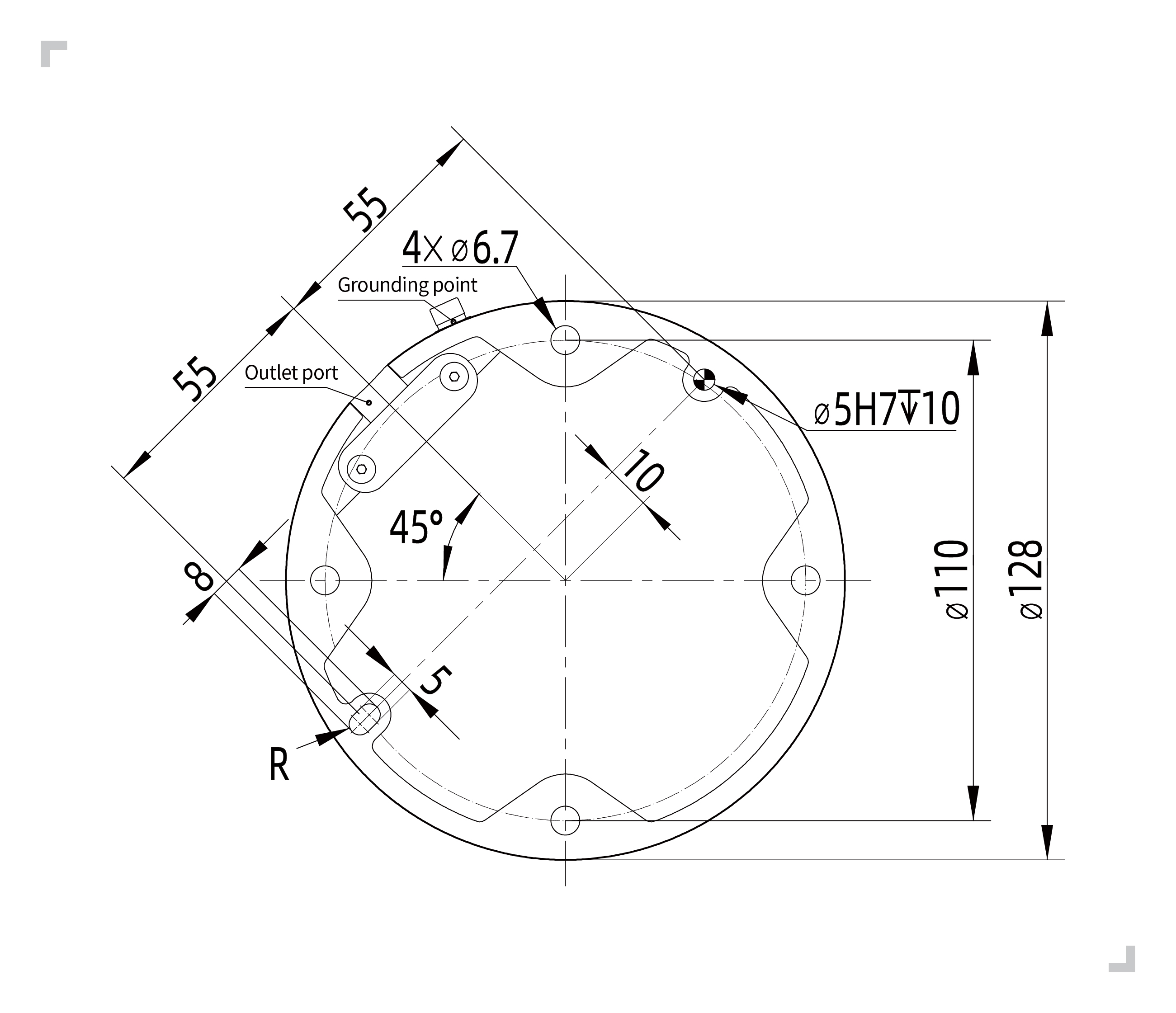
Podczas montażu robota na podstawie montażowej należy użyć 4 śrub M6 o klasie wytrzymałości nie niższej niż 8.8, aby zamocować robota na podstawie montażowej. Śruby należy dokręcić momentem nie mniejszym niż 10 Nm. Zaleca się użycie dwóch otworów kołkowych o średnicy 5 mm na podstawie montażowej w połączeniu z kołkami do pozycjonowania robota, aby zwiększyć dokładność montażu robota i zapobiec przemieszczaniu się robota spowodowanemu kolizjami. Gdy robot ma wysokie wymagania co do dokładności działania, należy obowiązkowo dodać kołki do pozycjonowania robota.
W zależności od scenariusza zastosowania zaleca się następujące podstawy montażowe robota:
W przypadku zastosowań, w których prędkość ruchu nie jest zbyt duża, wymagania dotyczące precyzji są średnie, a montaż do podłogi jest niewygodny, zaleca się następującą podstawę montażową robota:
Wykres 3.4-3 Podstawa montażowa robota o niskich wymaganiach dla FR3/FR3-WMS/FR3-WML/FR3-C/FR5-C
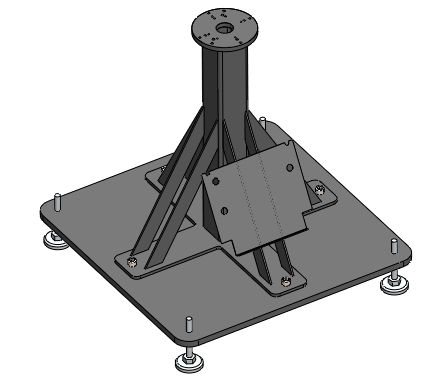
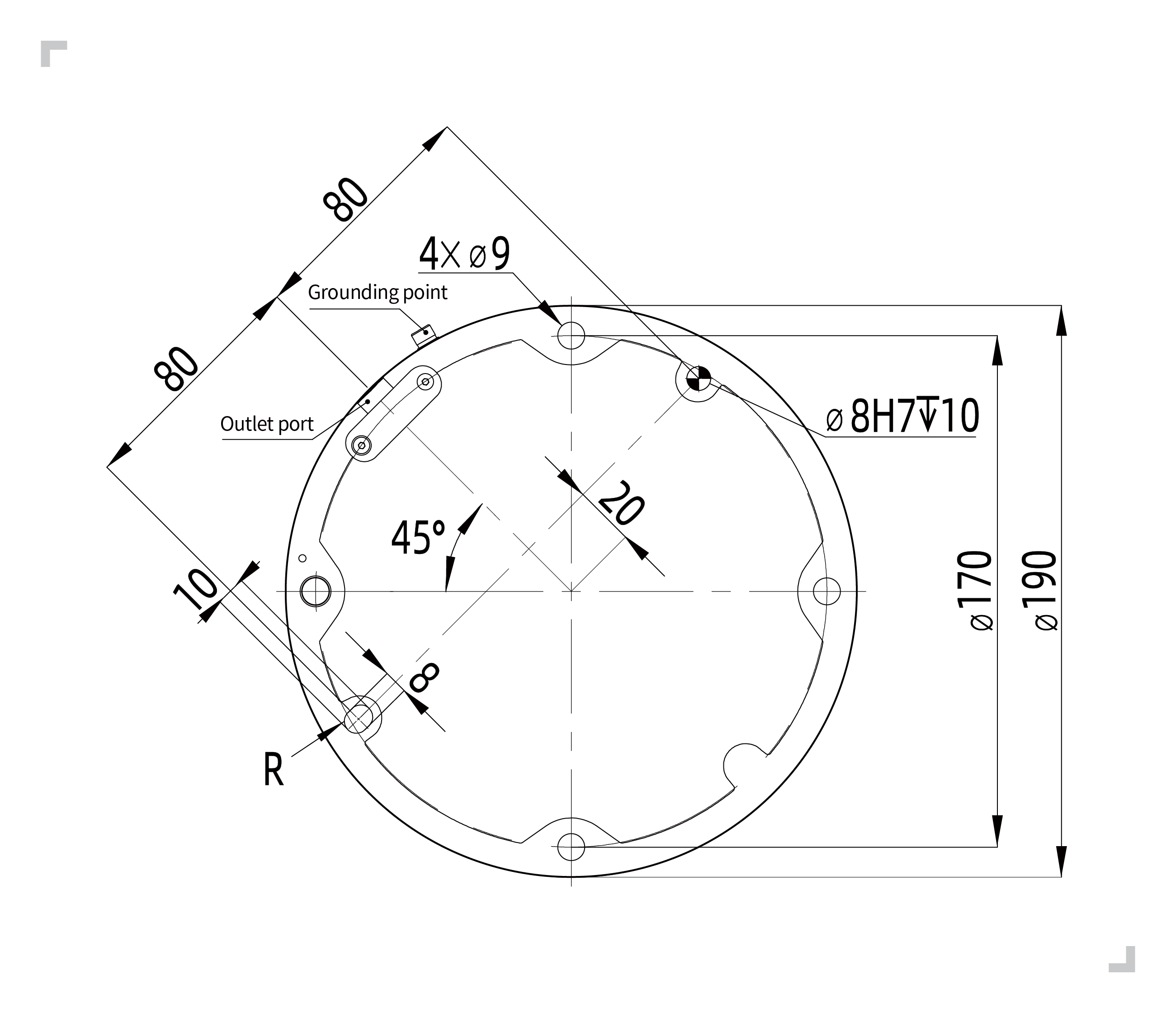
W przypadku zastosowań, w których prędkość ruchu jest stosunkowo duża, a wymagania dotyczące precyzji są wysokie, zaleca się następującą podstawę montażową robota i zamocowanie robota na solidnym podłożu:
Wykres 3.4-4 Podstawa montażowa robota o wysokich wymaganiach dla FR3/FR3-WMS/FR3-WML/FR3-C/FR5-C
3.4.1.2. Wymagania instalacji ramienia robota FR5
Podczas montażu robota na podstawie montażowej należy użyć 4 śrub M8 o klasie wytrzymałości nie niższej niż 8.8, aby zamocować robota na podstawie montażowej. Śruby należy dokręcić momentem nie mniejszym niż 20 Nm. Zaleca się użycie dwóch otworów kołkowych o średnicy 8 mm na podstawie montażowej w połączeniu z kołkami do pozycjonowania robota, aby zwiększyć dokładność montażu robota i zapobiec przemieszczaniu się robota spowodowanemu kolizjami. Gdy robot ma wysokie wymagania co do dokładności działania, należy obowiązkowo dodać kołki do pozycjonowania robota.
W zależności od scenariusza zastosowania zaleca się następujące podstawy montażowe robota:
W przypadku zastosowań, w których prędkość ruchu nie jest zbyt duża, wymagania dotyczące precyzji są średnie, a montaż do podłogi jest niewygodny, zaleca się następującą podstawę montażową robota:
Wykres 3.4-6 Podstawa montażowa robota o niskich wymaganiach dla FR5
W przypadku zastosowań, w których prędkość ruchu jest stosunkowo duża, a wymagania dotyczące precyzji są wysokie, zaleca się następującą podstawę montażową robota i zamocowanie robota na solidnym podłożu:
Wykres 3.4-7 Podstawa montażowa robota o wysokich wymaganiach dla FR5
3.4.1.3. Wymagania instalacji ramienia robota FR10, FR16
Podczas montażu robota na podstawie montażowej należy użyć 4 śrub M8 o klasie wytrzymałości nie niższej niż 8.8, aby zamocować robota na podstawie montażowej. Śruby należy dokręcić momentem nie mniejszym niż 25 Nm. Zaleca się użycie dwóch otworów kołkowych o średnicy 8 mm na podstawie montażowej w połączeniu z kołkami do pozycjonowania robota, aby zwiększyć dokładność montażu robota i zapobiec przemieszczaniu się robota spowodowanemu kolizjami. Gdy robot ma wysokie wymagania co do dokładności działania, należy obowiązkowo dodać kołki do pozycjonowania robota.
W zależności od scenariusza zastosowania zaleca się następujące podstawy montażowe robota:
W przypadku zastosowań, w których prędkość ruchu nie jest zbyt duża, wymagania dotyczące precyzji są średnie, a montaż do podłogi jest niewygodny, zaleca się następującą podstawę montażową robota:
Wykres 3.4-9 Podstawa montażowa robota o niskich wymaganiach dla FR10, FR16
W przypadku zastosowań, w których prędkość ruchu jest stosunkowo duża, a wymagania dotyczące precyzji są wysokie, zaleca się następującą podstawę montażową robota i zamocowanie robota na solidnym podłożu:
Wykres 3.4-10 Podstawa montażowa robota o wysokich wymaganiach dla FR10, FR16
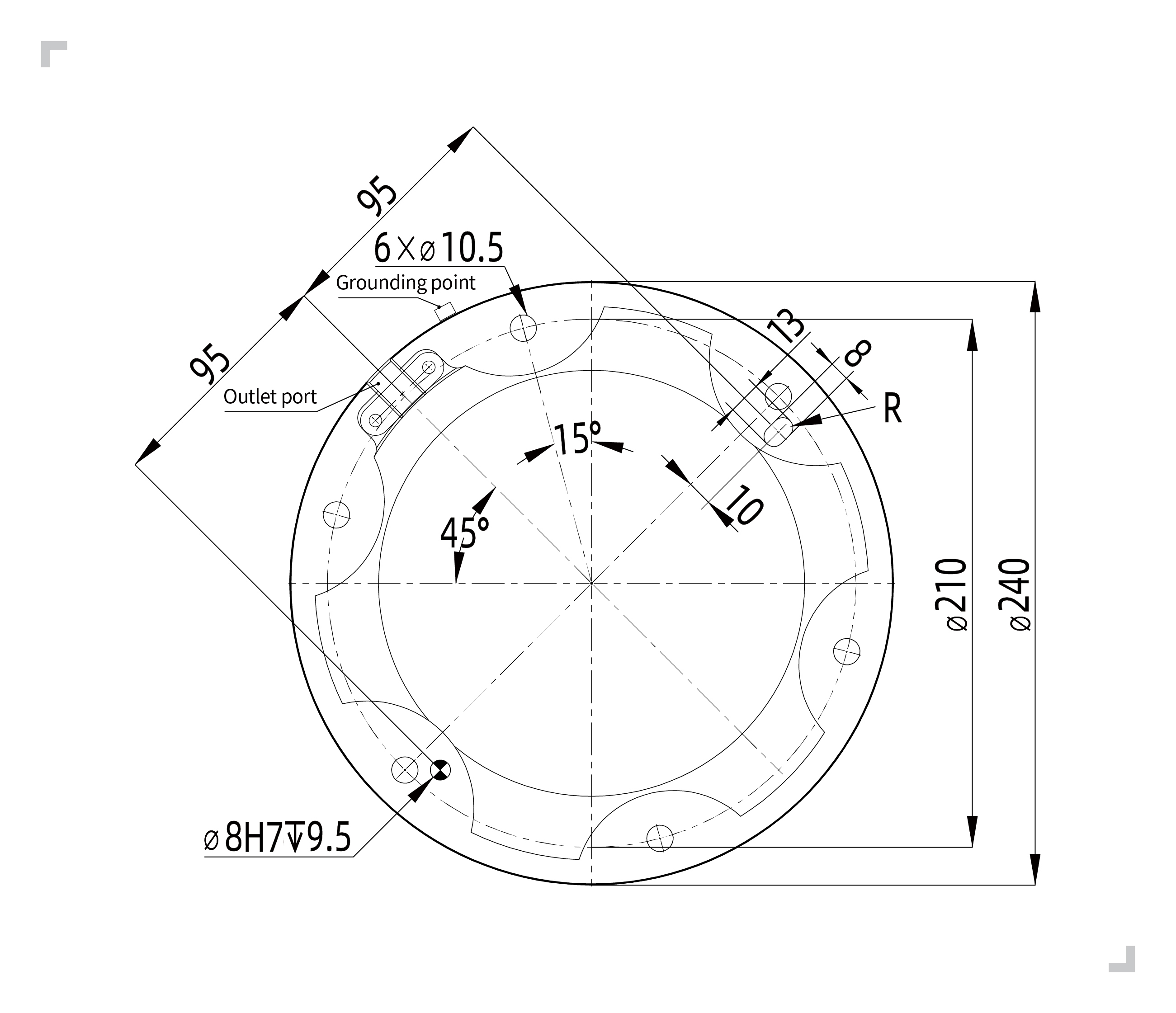
3.4.1.4. Wymagania instalacji ramienia robota FR20, FR30, FR30L
Podczas montażu robota na podstawie montażowej należy użyć 6 śrub M10 o klasie wytrzymałości nie niższej niż 8.8, aby zamocować robota na podstawie montażowej. Śruby należy dokręcić momentem nie mniejszym niż 45 Nm. Zaleca się użycie dwóch otworów kołkowych o średnicy 8 mm na podstawie montażowej w połączeniu z kołkami do pozycjonowania robota, aby zwiększyć dokładność montażu robota i zapobiec przemieszczaniu się robota spowodowanemu kolizjami. Gdy robot ma wysokie wymagania co do dokładności działania, należy obowiązkowo dodać kołki do pozycjonowania robota.
Ze względu na dużą masę własną i duży moment bezwładności robotów FR20 i FR30, zaleca się mocowanie ich bezpośrednio do podłoża. Zalecana podstawa jest następująca:
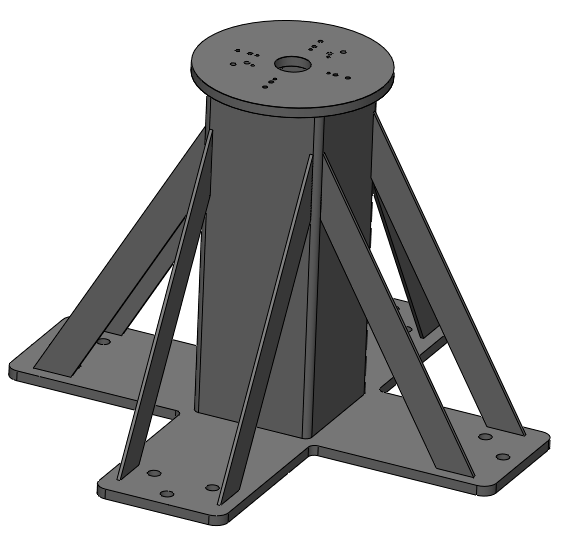
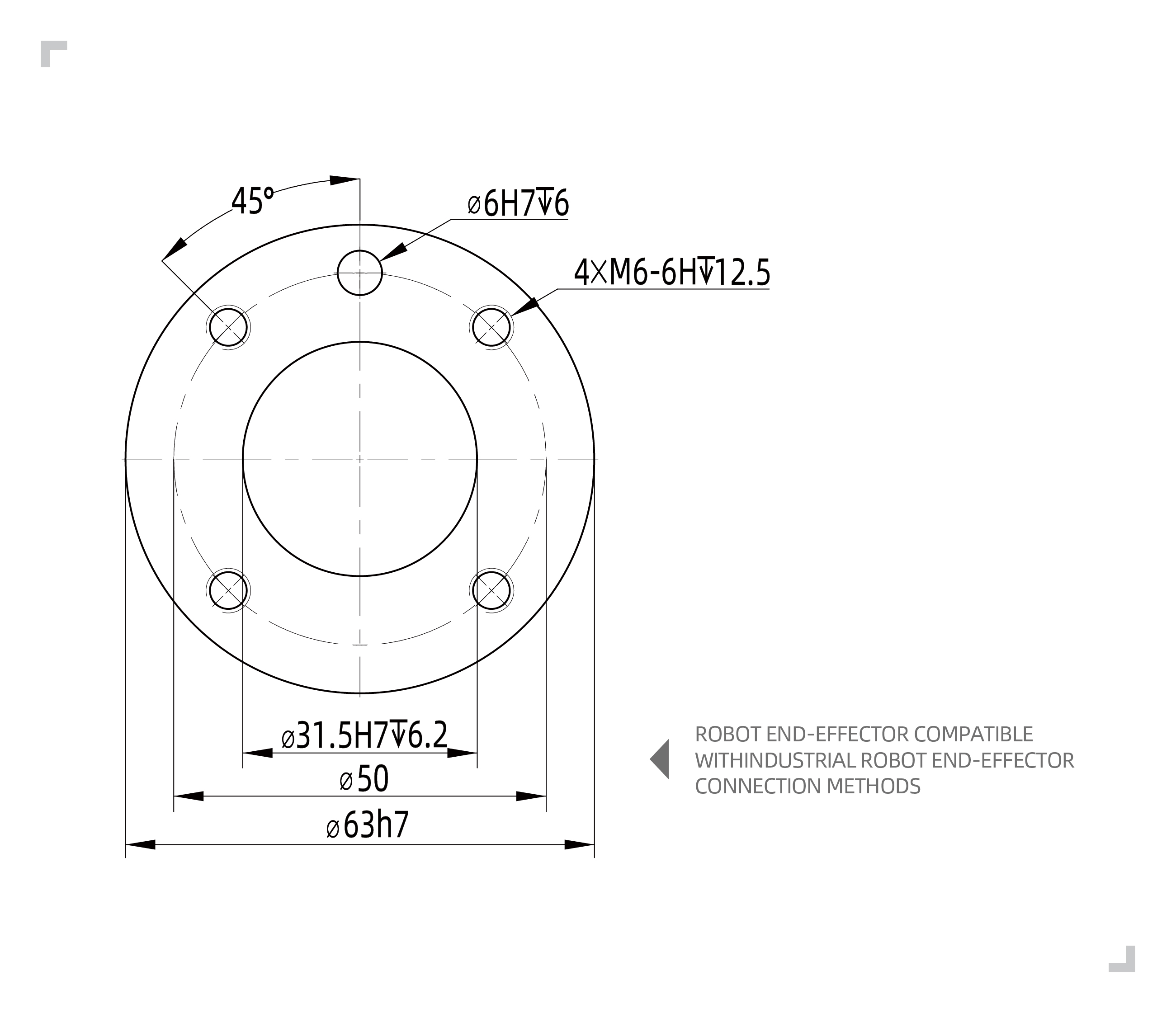
Kołnierz narzędziowy robota ma cztery gwintowane otwory M6, które służą do mocowania narzędzia do robota. Śruby M6 należy dokręcić momentem 8 Nm, a ich klasa wytrzymałości nie może być niższa niż 8.8. Aby dokładnie ponownie ustawić narzędzie, należy użyć kołków w przewidzianych otworach kołkowych o średnicy 6 mm.
Upewnij się, że narzędzie jest prawidłowo i bezpiecznie zamocowane.
Upewnij się, że konstrukcja narzędzia jest bezpieczna i żadne części nie mogą spaść, powodując zagrożenie.
Wkręcanie śrub M6 na długość większą niż 8 mm w górny kołnierz robota może spowodować uszkodzenie kołnierza narzędziowego i nieodwracalne uszkodzenia, co będzie wymagało wymiany kołnierza narzędziowego.
Zamontuj robota na solidnej powierzchni, która jest wystarczająco wytrzymała, aby utrzymać co najmniej 5-krotność ciężaru ramienia robota, a powierzchnia ta nie może być podatna na wibracje.
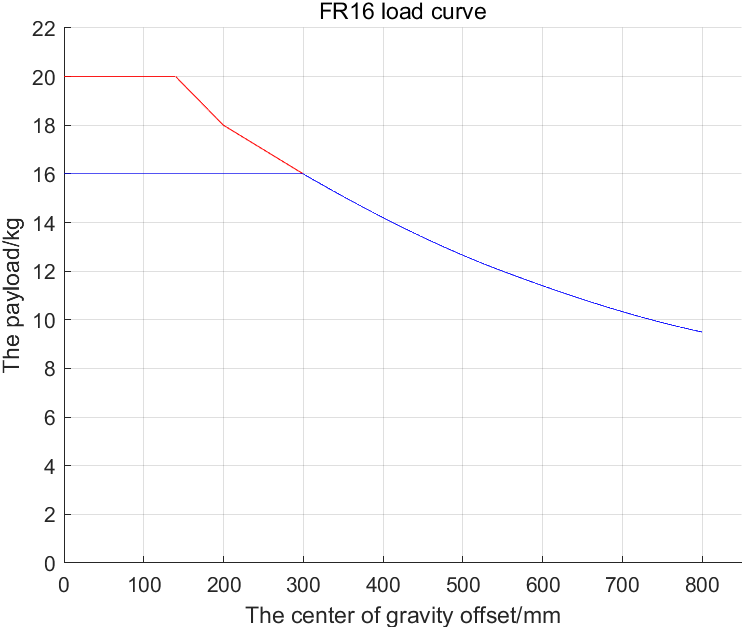
Krzywe obciążenia omawiane w tej sekcji są oparte na testach przeprowadzonych na poszczególnych modelach na określonych trajektoriach. Krzywe obciążenia dla poszczególnych modeli mają część „Pełna wydajność” i „Rozszerzona zdolność obciążenia”, co następuje:
Środowisko pracy dla „Pełnej wydajności” to: współczynnik kompensacji tarcia każdego stawu = 1; poziom kolizji każdego stawu = 10; ustawienie 100% prędkości roboczej i przyspieszenia 360 deg/s² w interfejsie sieciowym; dynamika 2.0. W tym środowisku część „Pełna wydajność” krzywej obciążenia jest odpowiednia dla zdecydowanej większości trajektorii.
Jeśli obciążenie końcowe znajduje się w obszarze „Rozszerzonej zdolności obciążenia”, należy włączyć „Tryb optymalny czasowo” i spełnić ograniczenia przyspieszenia lub zmniejszyć zakres roboczy robota.
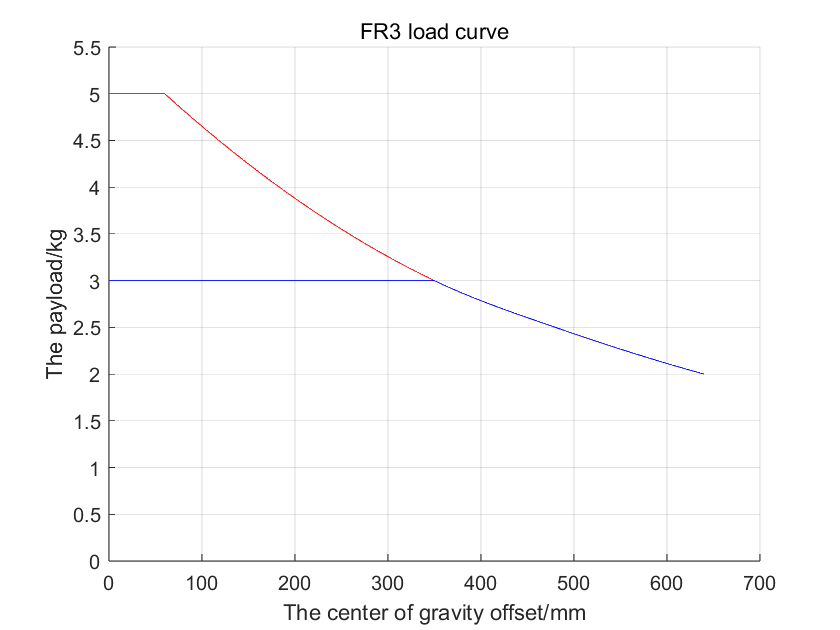
Znamionowa ładowność robota zależy od przesunięcia środka ciężkości ładunku. Przesunięcie środka ciężkości jest definiowane jako odległość między środkiem kołnierza końcowego a środkiem ciężkości dodatkowego ładunku.
Robot współpracujący FR3 może przenosić maksymalnie 5 kg obciążenia, a jego ładowność znamionowa wynosi 3 kg. Krzywa obciążenia przedstawiono na rysunku. Szczegółowe znaczenie krzywej obciążenia jest następujące:
FR3 przy pełnej wydajności może przenosić obciążenie do 3 kg włącznie, patrz „Niebieska linia obwiedni”.
Gdy obciążenie wynosi od 3 kg do 5 kg, jest to rozszerzona zdolność obciążenia, patrz „Czerwona linia obwiedni”. W tym stanie robot może działać w następujących warunkach:
① Włącz „Tryb optymalny czasowo”, zaleca się ustawienie przyspieszenia poniżej 360 deg/s².
② Zmniejsz zakres roboczy robota lub zmniejsz prędkość roboczą.
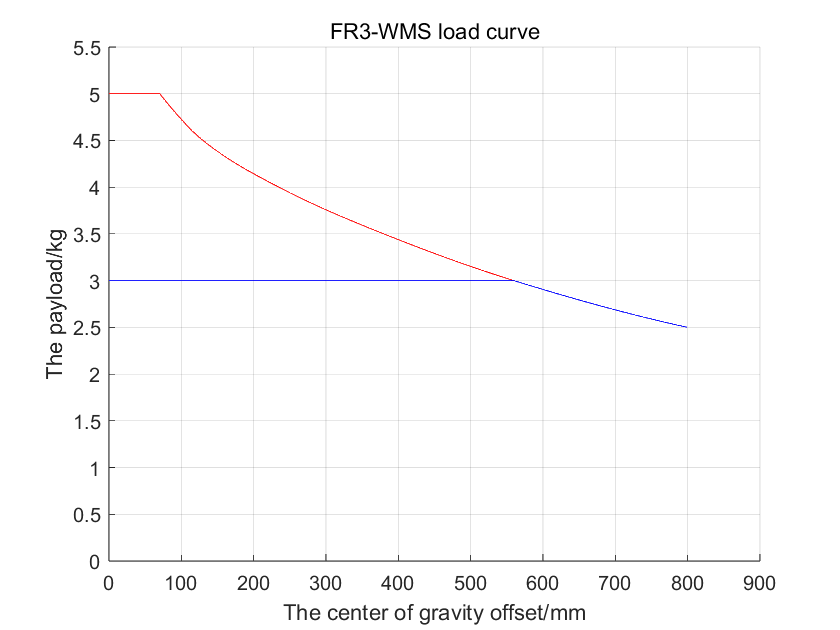
Robot współpracujący FR3-WMS może przenosić maksymalnie 5 kg obciążenia, a jego ładowność znamionowa wynosi 3 kg. Krzywa obciążenia przedstawiono na rysunku. Szczegółowe znaczenie krzywej obciążenia jest następujące:
FR3-WMS przy pełnej wydajności może przenosić obciążenie do 3 kg włącznie, patrz „Niebieska linia obwiedni”.
Gdy obciążenie wynosi od 3 kg do 5 kg, jest to rozszerzona zdolność obciążenia, patrz „Czerwona linia obwiedni”. W tym stanie robot może działać w następujących warunkach:
① Włącz „Tryb optymalny czasowo”, zaleca się ustawienie przyspieszenia poniżej 360 deg/s².
② Zmniejsz zakres roboczy robota lub zmniejsz prędkość roboczą.
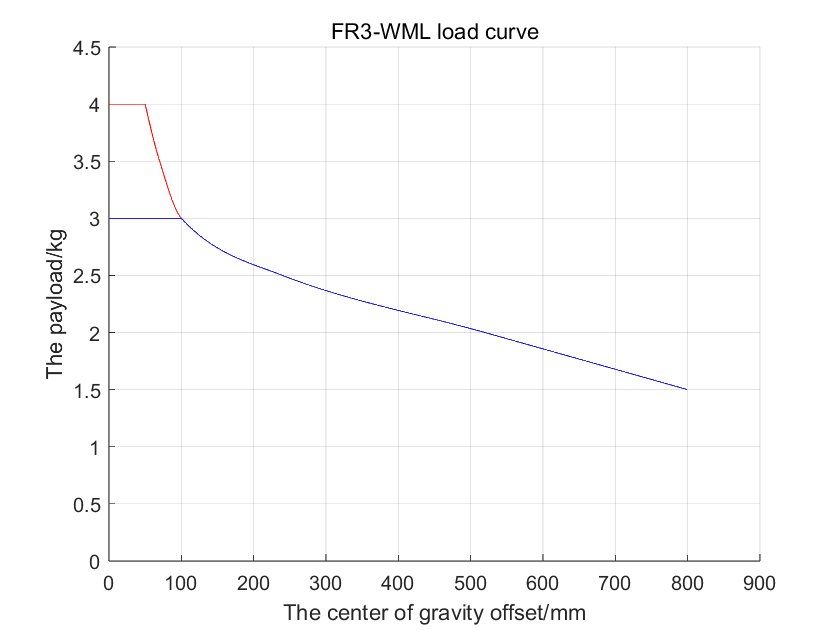
Robot współpracujący FR3-WML może przenosić maksymalnie 4 kg obciążenia, a jego ładowność znamionowa wynosi 3 kg. Krzywa obciążenia przedstawiono na rysunku. Szczegółowe znaczenie krzywej obciążenia jest następujące:
FR3-WMS przy pełnej wydajności może przenosić obciążenie do 3 kg włącznie, patrz „Niebieska linia obwiedni”.
Gdy obciążenie wynosi od 3 kg do 4 kg, jest to rozszerzona zdolność obciążenia, patrz „Czerwona linia obwiedni”. W tym stanie robot może działać w następujących warunkach:
① Włącz „Tryb optymalny czasowo”, zaleca się ustawienie przyspieszenia poniżej 360 deg/s².
② Zmniejsz zakres roboczy robota lub zmniejsz prędkość roboczą.
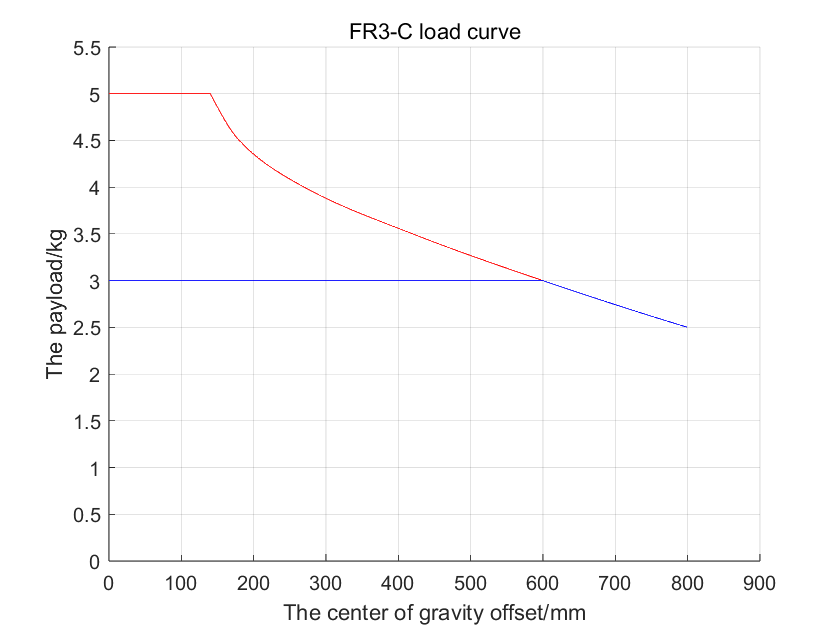
Robot współpracujący FR3-C może przenosić maksymalnie 5 kg obciążenia, a jego ładowność znamionowa wynosi 3 kg. Krzywa obciążenia przedstawiono na rysunku. Szczegółowe znaczenie krzywej obciążenia jest następujące:
FR3-WMS przy pełnej wydajności może przenosić obciążenie do 3 kg włącznie, patrz „Niebieska linia obwiedni”.
Gdy obciążenie wynosi od 3 kg do 5 kg, jest to rozszerzona zdolność obciążenia, patrz „Czerwona linia obwiedni”. W tym stanie robot może działać w następujących warunkach:
① Włącz „Tryb optymalny czasowo”, zaleca się ustawienie przyspieszenia poniżej 360 deg/s².
② Zmniejsz zakres roboczy robota lub zmniejsz prędkość roboczą.
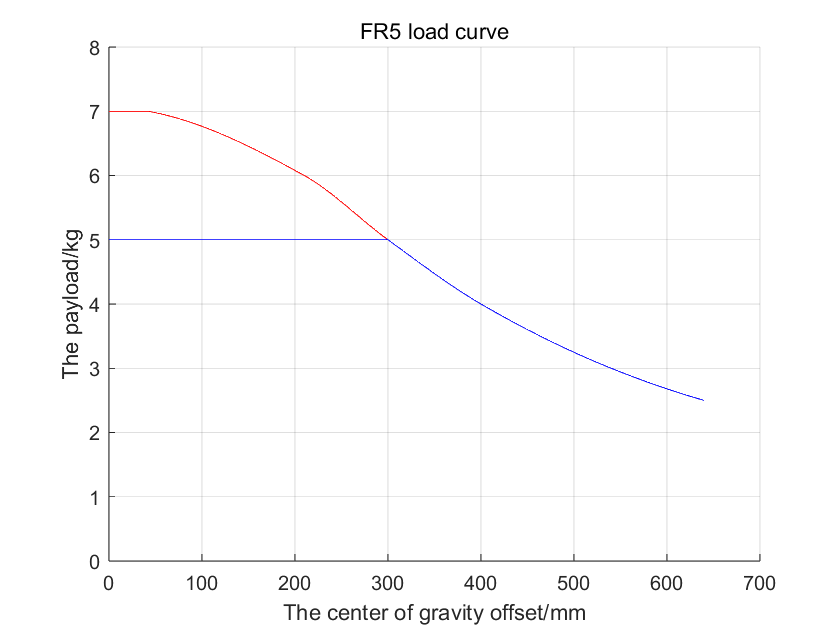
Robot współpracujący FR5 może przenosić maksymalnie 7 kg obciążenia, a jego ładowność znamionowa wynosi 5 kg. Krzywa obciążenia przedstawiono na rysunku. Szczegółowe znaczenie krzywej obciążenia jest następujące:
FR5 przy pełnej wydajności może przenosić obciążenie do 5 kg włącznie, patrz „Niebieska linia obwiedni”.
Gdy obciążenie wynosi od 5 kg do 7 kg, jest to rozszerzona zdolność obciążenia, patrz „Czerwona linia obwiedni”. W tym stanie robot może działać w następujących warunkach:
① Włącz „Tryb optymalny czasowo”, zaleca się ustawienie przyspieszenia poniżej 360 deg/s².
② Zmniejsz zakres roboczy robota lub zmniejsz prędkość roboczą.
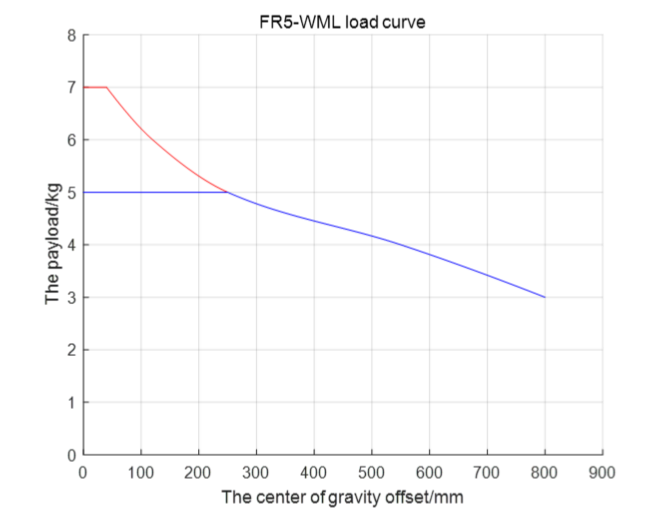
Robot współpracujący FR5-WML może przenosić maksymalnie 7 kg obciążenia, a jego ładowność znamionowa wynosi 5 kg. Krzywa obciążenia przedstawiono na rysunku. Szczegółowe znaczenie krzywej obciążenia jest następujące:
Obszar w „Niebieskiej linii obwiedni” to pełna wydajność: może działać na zdecydowanej większości trajektorii przy współczynniku kompensacji tarcia 1, dynamice 2.0, 100% prędkości, przyspieszeniu 360 deg/s² (tryb konserwacji).
Obszar w „Czerwonej linii obwiedni” to rozszerzona zdolność obciążenia, może działać w następujących warunkach:
① Włącz „Tryb optymalny czasowo”.
② Zmniejsz zakres roboczy robota lub zmniejsz prędkość roboczą.
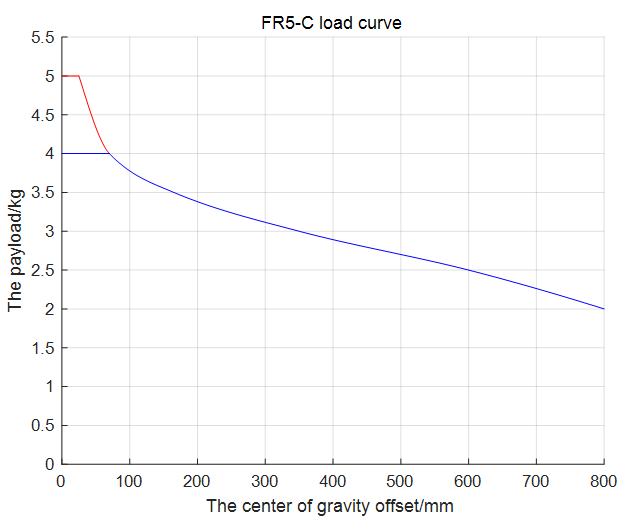
Robot współpracujący FR5-C może przenosić maksymalnie 5 kg obciążenia, a jego ładowność znamionowa wynosi 4 kg. Krzywa obciążenia przedstawiono na rysunku jako „Pełna wydajność”.
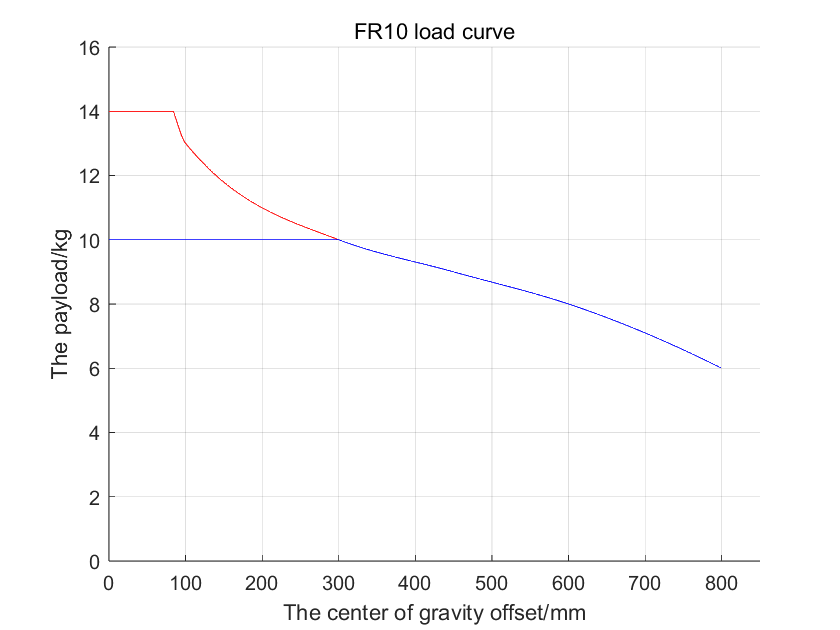
Robot współpracujący FR10 może przenosić maksymalnie 14 kg obciążenia, a jego ładowność znamionowa wynosi 10 kg. Krzywa obciążenia przedstawiono na rysunku 3. Szczegółowe znaczenie krzywej obciążenia jest następujące:
FR10 przy pełnej wydajności może przenosić obciążenie do 10 kg włącznie, patrz „Niebieska linia obwiedni”.
Gdy obciążenie wynosi od 10 kg do 14 kg, jest to rozszerzona zdolność obciążenia, patrz „Czerwona linia obwiedni”. W tym stanie robot może działać w następujących warunkach:
① Włącz „Tryb optymalny czasowo”, zaleca się ustawienie przyspieszenia poniżej 180 deg/s².
② Zmniejsz zakres roboczy robota lub zmniejsz prędkość roboczą.
Robot współpracujący FR16 może przenosić maksymalnie 20 kg obciążenia, a jego ładowność znamionowa wynosi 16 kg. Krzywa obciążenia przedstawiono na rysunku. Szczegółowe znaczenie krzywej obciążenia jest następujące:
FR16 przy pełnej wydajności może przenosić obciążenie do 16 kg włącznie, patrz „Niebieska linia obwiedni”.
Gdy obciążenie wynosi od 16 kg do 20 kg, jest to rozszerzona zdolność obciążenia, patrz „Czerwona linia obwiedni”. W tym stanie robot może działać w następujących warunkach:
① Włącz „Tryb optymalny czasowo”, zaleca się ustawienie przyspieszenia poniżej 180 deg/s².
② Zmniejsz zakres roboczy robota lub zmniejsz prędkość roboczą.
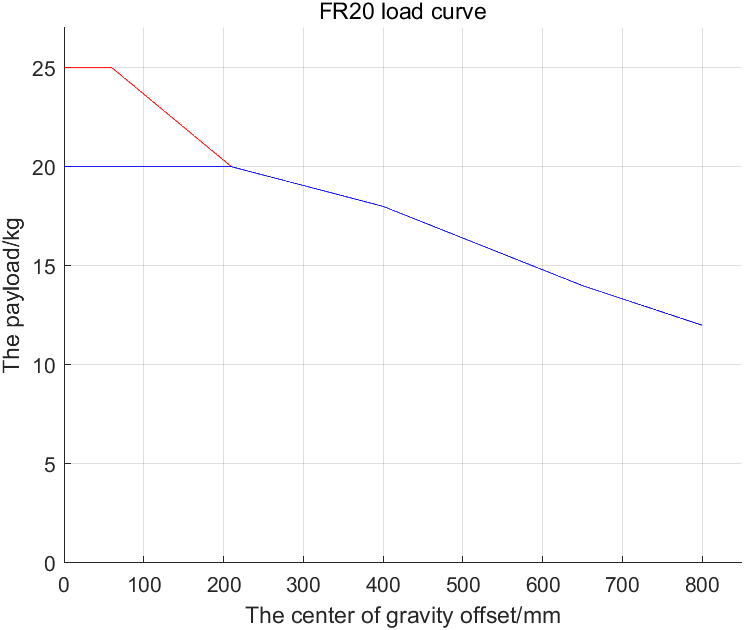
Robot współpracujący FR20 może przenosić maksymalnie 25 kg obciążenia, a jego ładowność znamionowa wynosi 20 kg. Krzywa obciążenia przedstawiono na rysunku. Szczegółowe znaczenie krzywej obciążenia jest następujące:
FR20 przy pełnej wydajności może przenosić obciążenie do 20 kg włącznie, patrz „Niebieska linia obwiedni”.
Gdy obciążenie wynosi od 20 kg do 25 kg, jest to rozszerzona zdolność obciążenia, patrz „Czerwona linia obwiedni”. W tym stanie robot może działać w następujących warunkach:
① Włącz „Tryb optymalny czasowo”, zaleca się ustawienie przyspieszenia poniżej 150 deg/s².
② Zmniejsz zakres roboczy robota lub zmniejsz prędkość roboczą.
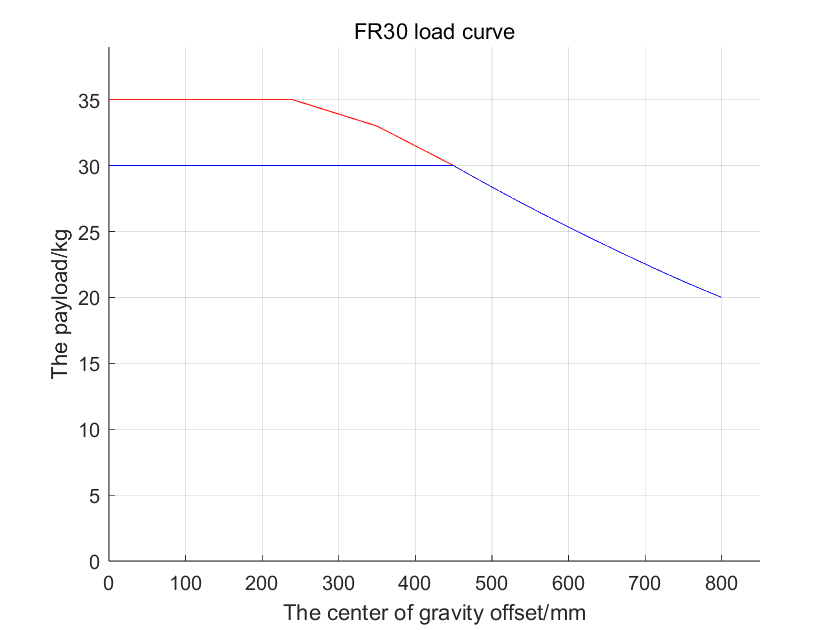
Robot współpracujący FR30 może przenosić maksymalnie 35 kg obciążenia, a jego ładowność znamionowa wynosi 30 kg. Krzywa obciążenia przedstawiono na rysunku.
FR30 przy pełnej wydajności może przenosić obciążenie do 30 kg włącznie, patrz „Niebieska linia obwiedni”.
Gdy obciążenie wynosi od 30 kg do 35 kg, jest to rozszerzona zdolność obciążenia, patrz „Czerwona linia obwiedni”. W tym stanie robot może działać w następujących warunkach:
① Włącz „Tryb optymalny czasowo”, zaleca się ustawienie przyspieszenia poniżej 150 deg/s².
② Zmniejsz zakres roboczy robota lub zmniejsz prędkość roboczą.
Roboty tej serii mogą być wyposażone w trzy różne skrzynki sterownicze z różnymi wejściami zasilania. Szczegółowe informacje na temat wejścia zasilania skrzynki sterowniczej znajdują się na tabliczce znamionowej skrzynki sterowniczej. Robot wymaga uziemienia elektrycznego.
Maksymalne wejście (do konfiguracji mocy przedwzmacniacza przez klienta)
Maksymalne wyjście (maksymalna wartość szczytowa)
DC 2 kW
30-60 V DC / 30 A
2000 W / 48 V DC / 41 A
DC 5 kW
30-60 V DC / 40 A
5000 W / 48 V DC / 104 A
AC wąskie napięcie 2 kW
176-264 V DC / 10 A / jednofazowe / 50 Hz
2000 W / 48 V DC / 41 A
AC szerokie napięcie 2 kW
100-240 V DC / 10 A / jednofazowe / 50-60 Hz
2000 W / 48 V DC / 41 A
AC szerokie napięcie 5 kW
100-240 V DC / 16 A / jednofazowe / 50-60 Hz
5000 W / 48 V DC / 104 A
Ostrzeżenie
Przed przystąpieniem do podłączania należy koniecznie upewnić się, że zasilanie jest wyłączone, i umieścić w pobliżu tabliczkę ostrzegawczą.
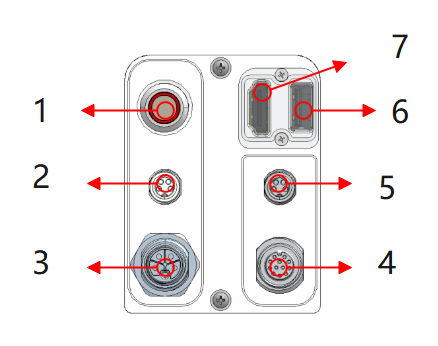
Zewnętrzne połączenia systemu sterowania ramieniem tej serii są wykonywane za pomocą wtyczek, które można podłączyć i szybko zainstalować. Panel podłączenia robota współpracującego przedstawiono na poniższym rysunku.
Upewnij się, że przycisk zasilania skrzynki sterowniczej jest wyłączony (przycisk ustawiony na 0), a następnie podłącz przewód zasilający do gniazda zasilania.
Podłącz kabel zasilający głównego ramienia robota do złącza zasilania głównego skrzynki sterowniczej.
Możesz używać I/O w skrzynce sterowniczej do sterowania różnymi urządzeniami, w tym przekaźnikami pneumatycznymi, PLC i przyciskami ograniczników. Wykres 3.5-2 przedstawia grupę złączy elektrycznych skrzynki sterowniczej, a wykres 3.5-3 przedstawia grupę złączy elektrycznych zintegrowanej mini skrzynki sterowniczej (mini BOX).
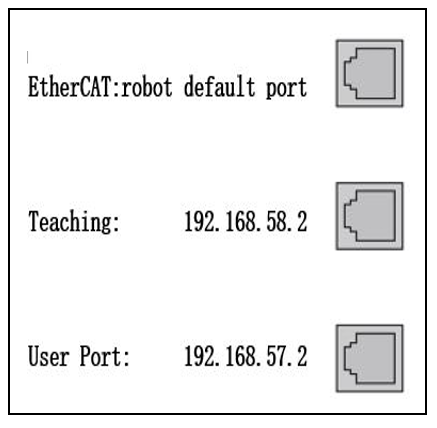
Adresy grupy złączy sieciowych w skrzynce sterowniczej przedstawiono na poniższym rysunku. Należy pamiętać, że rysunek ten odpowiada kolejności adresów wewnętrznych portów sieciowych skrzynki sterowniczej. Zabrania się odłączania domyślnych portów robota. Port użytkownika może być używany do komunikacji z urządzeniami takimi jak kamery. Jego adres IP to 192.168.57.2. Złącze panelu przyciskowego jest domyślnie portem sterowania panelu operatorskiego, a jego adres IP to 192.168.58.2. Użyj kabla sieciowego, aby połączyć złącze panelu przyciskowego z komputerem. Ustaw adres IP komputera na 192.168.58.10 lub w tej samej podsieci. Otwórz przeglądarkę Google Chrome i wprowadź 192.168.58.2, aby uzyskać dostęp do strony panelu operatorskiego. W skrzynce sterowniczej Easy Manufacturing dostęp do strony panelu operatorskiego uzyskuje się przez port sieciowy podłączony do panelu przyciskowego.
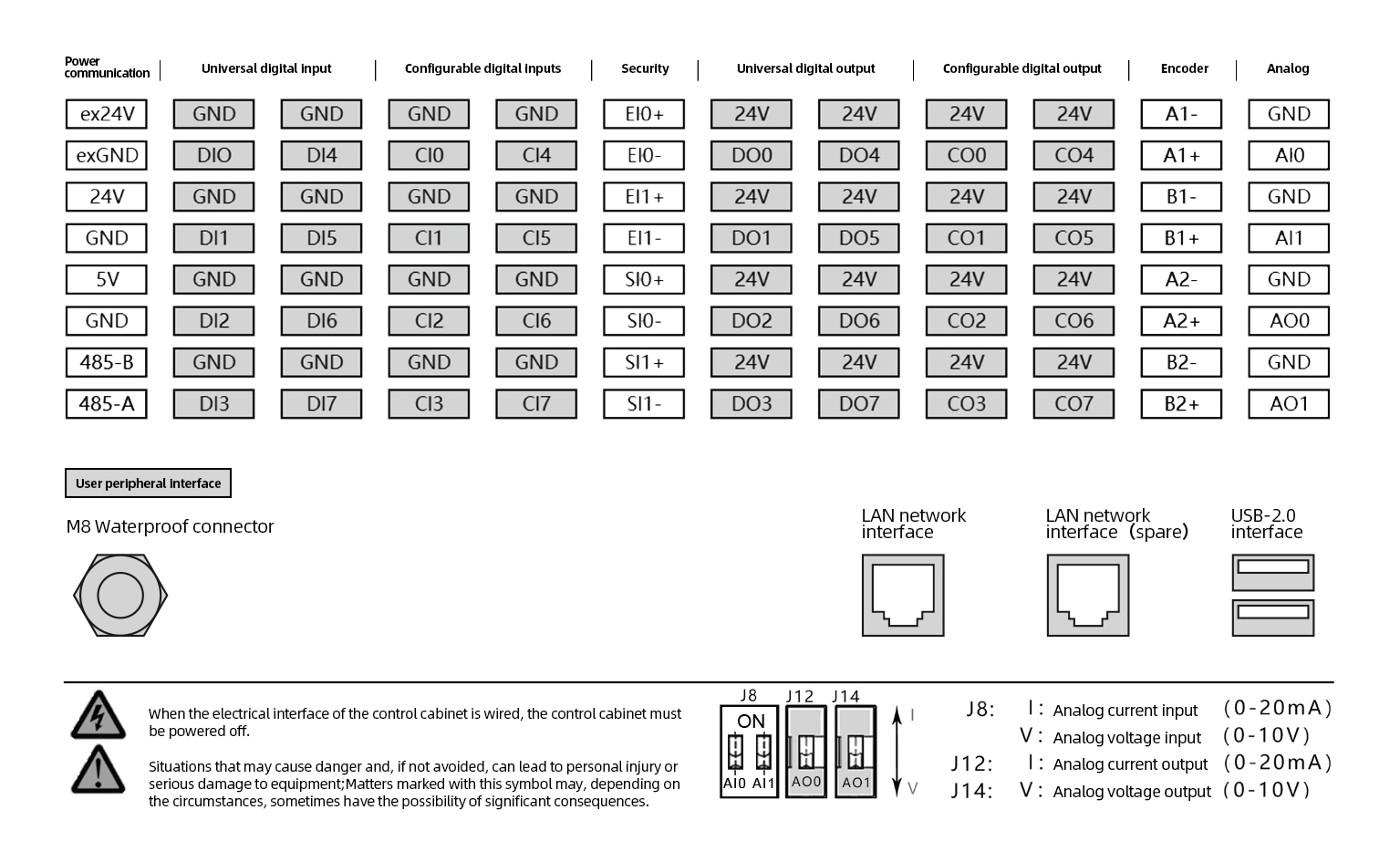
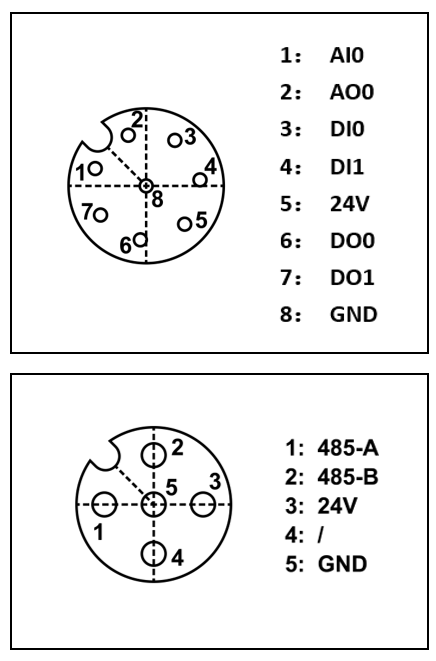
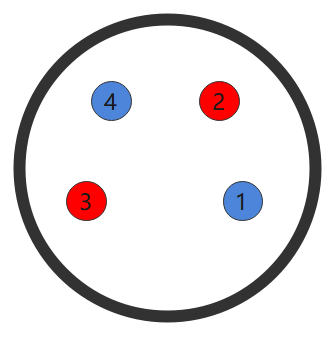
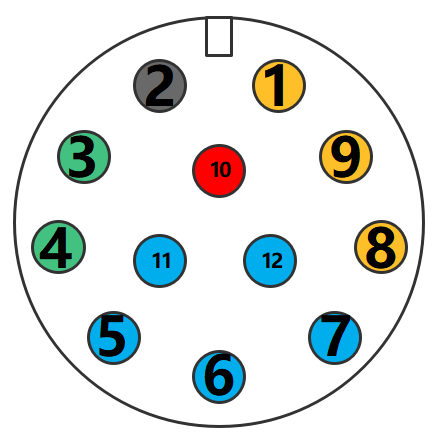
Możesz używać I/O płyty końcowej i interfejsu komunikacyjnego 485 do sterowania różnymi urządzeniami, w tym przekaźnikami pneumatycznymi, PLC i przyciskami awaryjnego zatrzymania. Rozmieszczenie pinów i ich opis przedstawiono na poniższym rysunku. Złącze I/O to złącze M12, 8-stykowe, gniazdo żeńskie.
Informacja
Zabrania się podłączania na gorąco I/O płyty końcowej i interfejsu 485.
Wykres 3.5-5 Schemat złączy elektrycznych płyty końcowej
Punkt uziemienia skrzynki sterowniczej znajduje się przy śrubie kombinowanej M4 w lewym górnym rogu przełącznika zasilania, jak pokazano na poniższym rysunku.
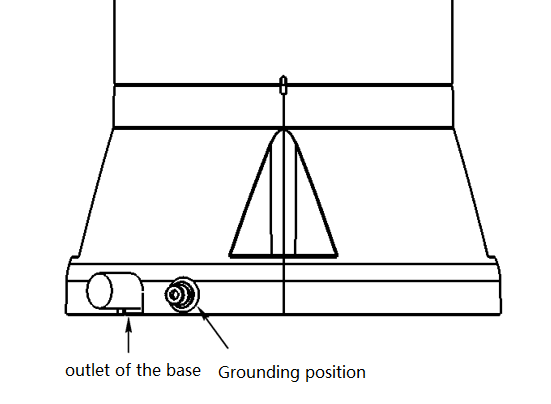
Punkt uziemienia korpusu znajduje się po prawej stronie miejsca wyjścia kabla z podstawy, jak pokazano na poniższym rysunku.
Wykres 3.5-7 Schemat uziemienia korpusu
Pojedynczy przewód ochronny nie powinien mieć mniejszego przekroju niż:
2,5 mm² miedzi lub 16 mm² aluminium, jeśli zapewniono ochronę przed uszkodzeniami mechanicznymi (kanały kablowe, rury itp.)
4 mm² miedzi lub 16 mm² aluminium, jeśli nie zapewniono ochrony przed uszkodzeniami mechanicznymi
3.5.6. Ogólne specyfikacje dla wszystkich cyfrowych wejść/wyjść
Niniejsza sekcja określa specyfikacje elektryczne dla 24-woltowych cyfrowych wejść/wyjść następujących skrzynek sterowniczych:
Bezpieczne wejścia/wyjścia
Ogólne cyfrowe wejścia/wyjścia
Robot musi być instalowany zgodnie ze specyfikacjami elektrycznymi.
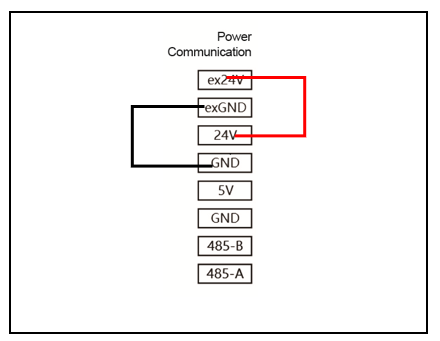
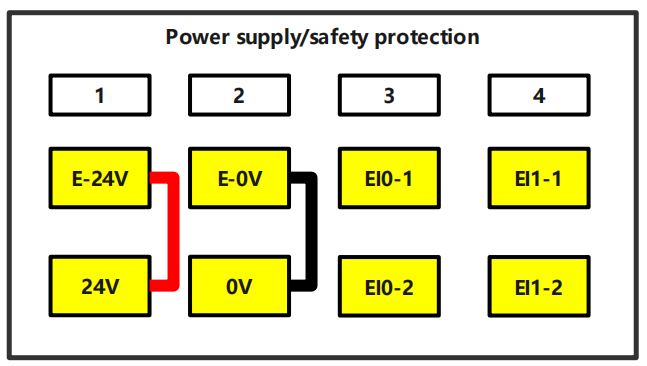
Konfigurując interfejs „Zasilanie i komunikacja” można użyć wewnętrznego lub zewnętrznego zasilania 24 V do zasilania cyfrowych wejść/wyjść. Dwa górne zaciski tego interfejsu (ex24V i exon) to 24 V i masa zewnętrznego zasilania, a dwa dolne zaciski (24V i GND) to 24 V i masa wewnętrznego zasilania. Domyślną konfiguracją jest użycie zasilania wewnętrznego. Skrzynkę sterowniczą i zintegrowaną mini skrzynkę sterowniczą (mini BOX) pokazano na poniższym rysunku.
Skrzynka sterownicza
Zintegrowana mini skrzynka sterownicza (mini BOX)
Wykres 3.5-8 Schemat zasilania i komunikacji 01
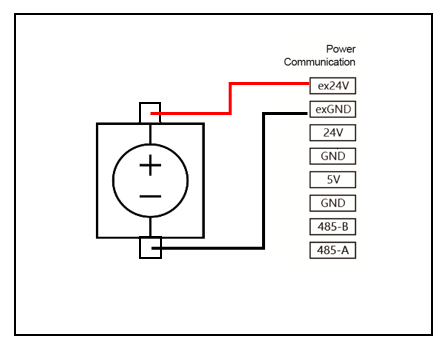
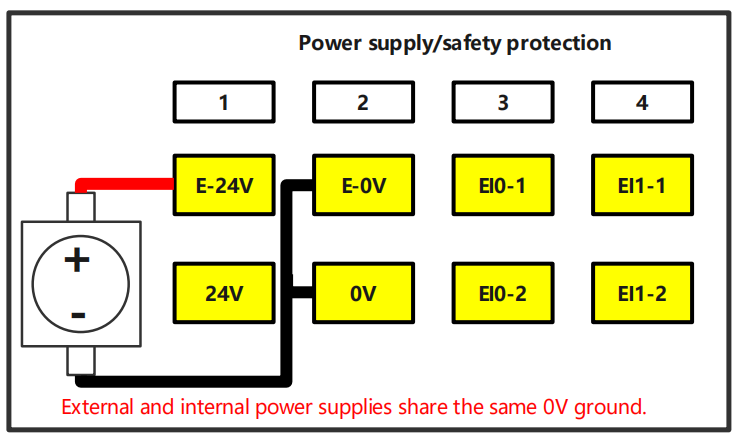
Jeśli moc obciążenia jest duża, można podłączyć zewnętrzne zasilanie, jak pokazano na poniższym rysunku. W zintegrowanej mini skrzynce sterowniczej (mini BOX) o szerokim zakresie napięcia AC, zewnętrzne zasilanie jest połączone z masą wewnętrznego zasilania.
Skrzynka sterownicza
Zintegrowana mini skrzynka sterownicza (mini BOX)
Wykres 3.5-9 Schemat zasilania i komunikacji 02
Specyfikacje elektryczne zasilania wewnętrznego i zewnętrznego przedstawiono w poniższej tabeli:
Tabela 3.5-1 Specyfikacje elektryczne zasilania wewnętrznego i zewnętrznego
Zacisk
Parametr
Wartość minimalna
Wartość typowa
Wartość maksymalna
Jednostka
Wewnętrzne zasilanie 24 V
[ex24V -exGND]
[ex24V -exGND]
Napięcie
Prąd
23
0
24
-
25
2
V
A
Wewnętrzne zasilanie 24 V
[24V- GND]
[24V- GND]
Napięcie
Prąd
23
0
24
-
25
1,5
V
A
Specyfikacje elektryczne cyfrowych wejść/wyjść przedstawiono w poniższej tabeli:
Niniejsza sekcja opisuje specyfikacje elektryczne bezpiecznych wejść/wyjść. Należy przestrzegać ogólnych specyfikacji elektrycznych z sekcji 3.5.6.
Urządzenia i sprzęt bezpieczeństwa muszą być instalowane zgodnie z instrukcjami bezpieczeństwa i oceną ryzyka, patrz rozdział 3.1. Wszystkie bezpieczne wejścia/wyjścia są sparowane (nadmiarowe) i muszą być prowadzone jako dwie niezależne gałęzie. Pojedyncza usterka nie powinna prowadzić do utraty funkcji bezpieczeństwa.
Bezpieczne wejścia/wyjścia obejmują awaryjne zatrzymanie i bezpieczne zatrzymanie. Wejścia awaryjnego zatrzymania są używane wyłącznie do urządzeń awaryjnego zatrzymania, a wejścia bezpiecznego zatrzymania są używane do różnych urządzeń ochronnych związanych z bezpieczeństwem. Różnice w funkcjach przedstawiono w poniższej tabeli:
Tabela 3.5-3 Różnice funkcji
Awaryjne zatrzymanie
Bezpieczne zatrzymanie
Robot zatrzymuje ruch
Tak
Tak
Kategoria zatrzymania
Kategoria 0
Kategoria 1
Wykonywanie programu P
Zatrzymanie
Wstrzymanie
Zasilanie robota
Wyłączone
Włączone
Ponowne uruchomienie
Ręczne
Automatyczne lub ręczne
Częstotliwość użytkowania
Rzadka
Częsta
Wymagana ponowna inicjalizacja
Wymagana
Niewymagana
Ostrzeżenie
Nigdy nie podłączaj sygnałów bezpieczeństwa do PLC, który nie ma odpowiedniego poziomu bezpieczeństwa. Nieprzestrzeganie tego ostrzeżenia może spowodować poważne obrażenia lub śmierć, ponieważ jedna z funkcji bezpiecznego zatrzymania może zostać pominięta. Sygnały interfejsu bezpieczeństwa muszą być oddzielone od sygnałów normalnego interfejsu I/O.
Wszystkie bezpieczne wejścia/wyjścia są zbudowane w sposób nadmiarowy (dwa niezależne kanały). Oba kanały muszą być prowadzone oddzielnie, aby pojedyncza usterka nie spowodowała utraty funkcji bezpieczeństwa.
Przed uruchomieniem robota należy zweryfikować funkcję bezpieczeństwa awaryjnego zatrzymania (robot zasilony i załączony, naciśnij przycisk awaryjnego zatrzymania, robot zatrzymuje się i odłącza zasilanie, wyłącz zasilanie, obróć przycisk awaryjnego zatrzymania, włącz zasilanie, robot zostaje ponownie załączony). Funkcje bezpieczeństwa muszą być regularnie testowane.
Instalacja robota musi być zgodna z tymi specyfikacjami. W przeciwnym razie może dojść do poważnych obrażeń lub śmierci, ponieważ funkcja bezpiecznego zatrzymania może zostać pominięta.
W poniższych podrozdziałach podano kilka przykładów użycia bezpiecznych wejść/wyjść.
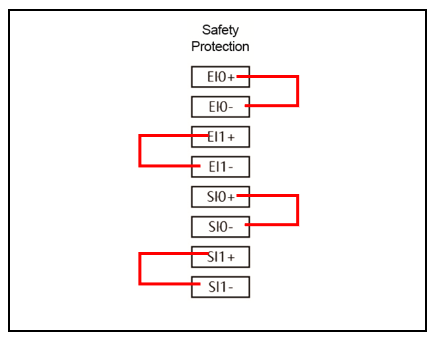
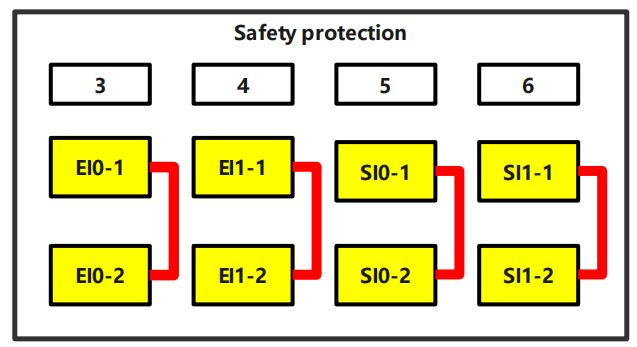
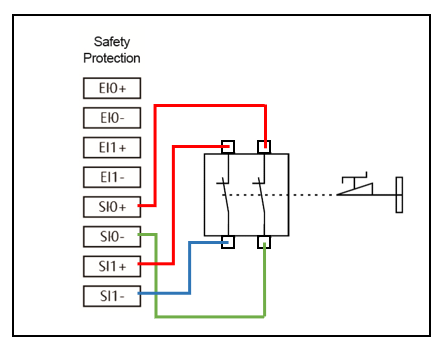
Domyślna konfiguracja bezpieczeństwa
Robot jest dostarczany z domyślną konfiguracją, umożliwiającą działanie bez żadnych dodatkowych urządzeń zabezpieczających. Patrz poniższy wykres:
Skrzynka sterownicza
Zintegrowana mini skrzynka sterownicza (mini BOX)
Wykres 3.5-10 Schemat zabezpieczeń 01
Podłączanie dodatkowego przycisku awaryjnego zatrzymania
W większości zastosowań wymagany jest jeden lub więcej dodatkowych przycisków awaryjnego zatrzymania. Patrz poniższy wykres:
Skrzynka sterownicza
Zintegrowana mini skrzynka sterownicza (mini BOX)
Wykres 3.5-11 Schemat zabezpieczeń 02
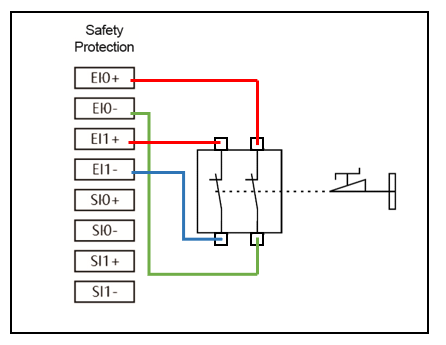
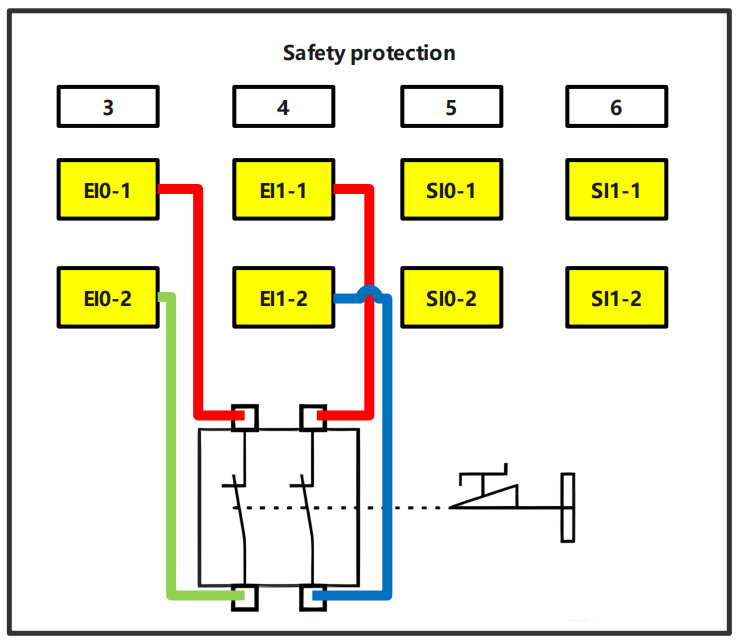
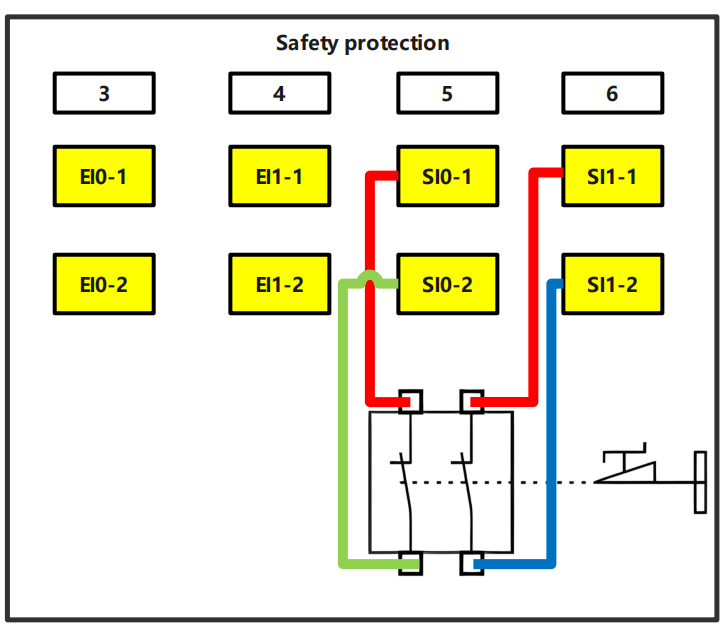
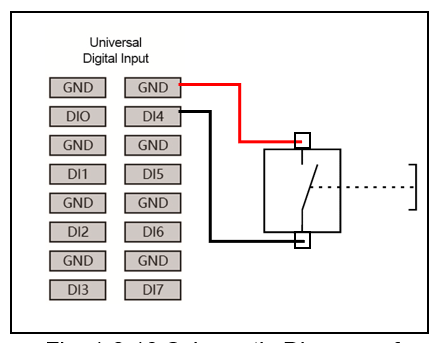
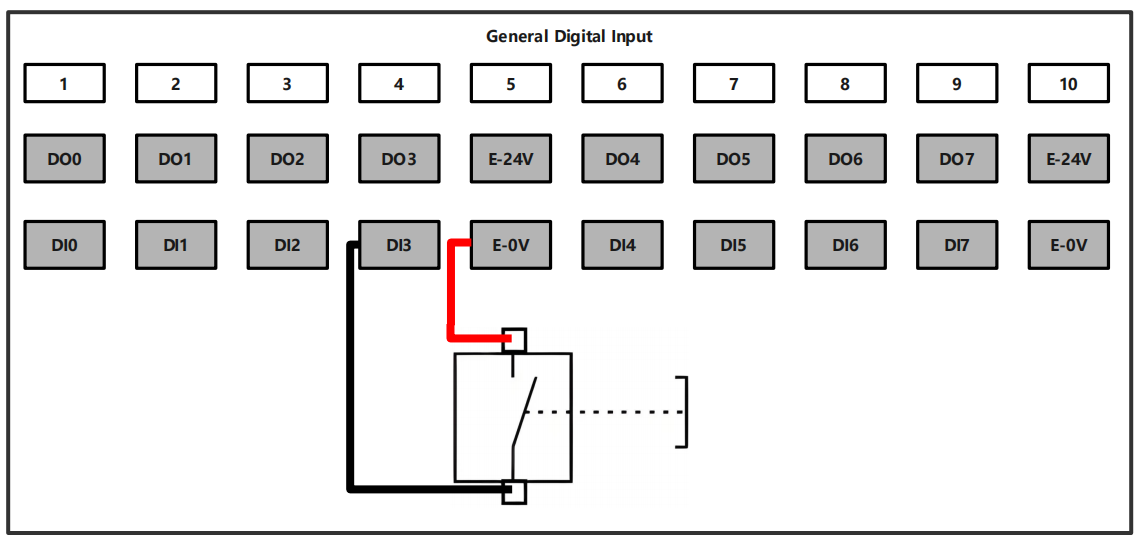
Podłączanie przycisku bezpiecznego zatrzymania
Przykładem urządzenia bezpiecznego zatrzymania jest wyłącznik drzwi, który zatrzymuje robota po otwarciu drzwi. Patrz poniższy wykres:
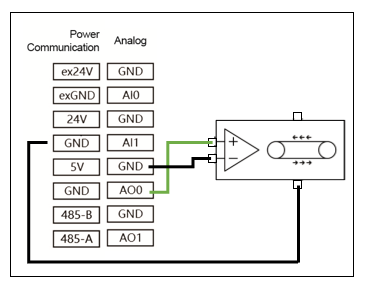
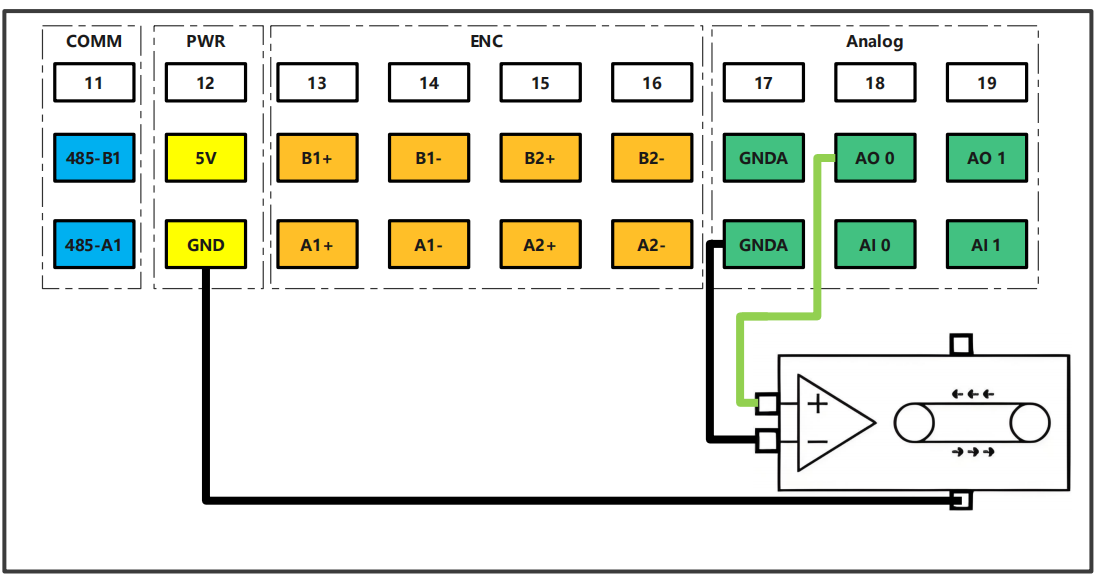
Niniejsza sekcja opisuje specyfikacje elektryczne ogólnych cyfrowych wejść/wyjść. Należy przestrzegać ogólnych specyfikacji elektrycznych z sekcji 3.5.6.
Ogólne cyfrowe wejścia/wyjścia mogą być używane do sterowania urządzeniami takimi jak przekaźniki, zawory elektromagnetyczne lub do interakcji z innymi PLC.
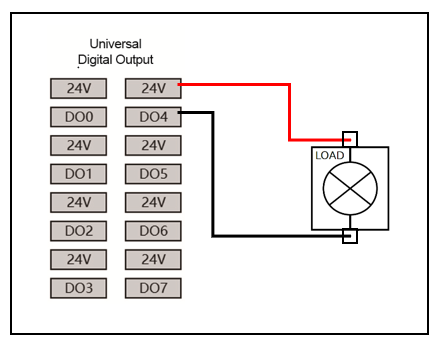
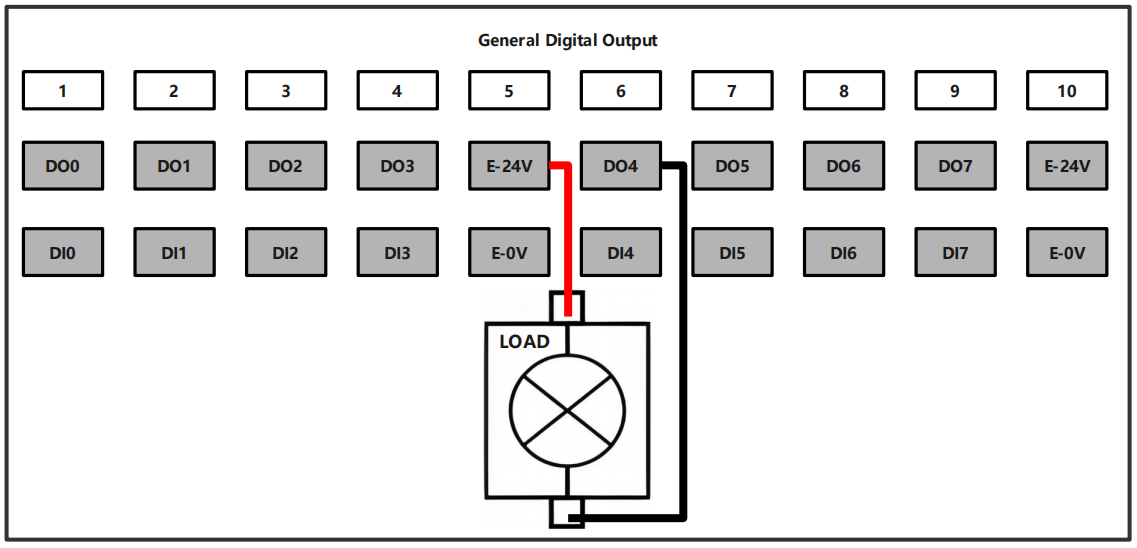
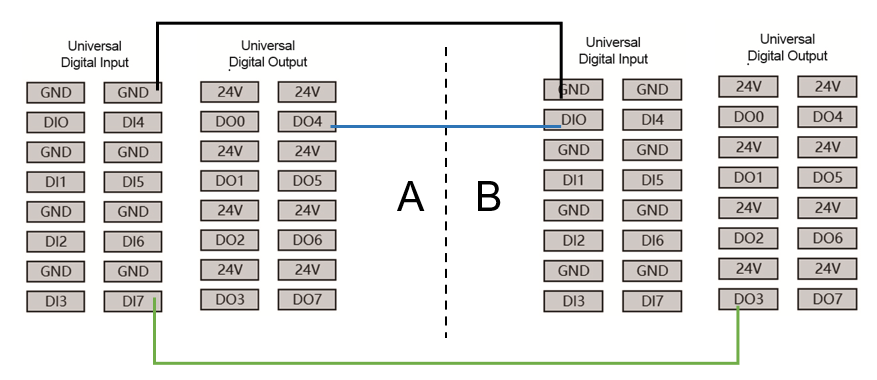
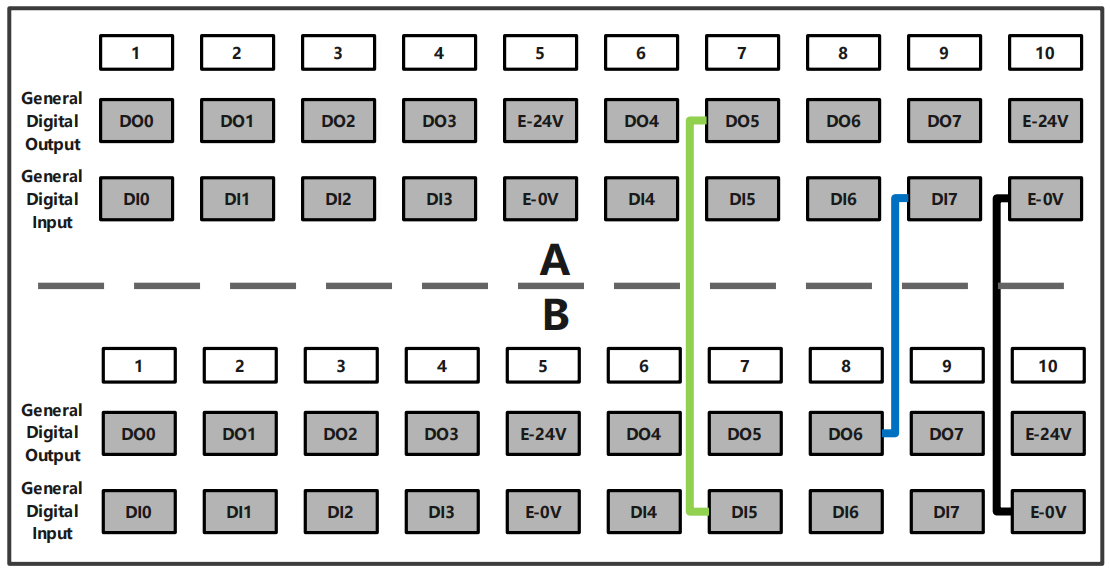
Sterowanie obciążeniem za pomocą wyjścia cyfrowego
Ten przykład pokazuje, jak podłączyć wyjście cyfrowe do sterowania obciążeniem. Patrz poniższy wykres:
Definicja robota współpracującego jest zgodna z międzynarodowymi normami ISO i odpowiednimi przepisami krajowymi w celu ochrony bezpieczeństwa operatora. Nie zalecamy bezpośredniego stosowania korpusu robota w sytuacjach, w których przedmiotem pracy jest ciało ludzkie. Jeśli jednak użytkownik lub twórca aplikacji naprawdę potrzebuje zastosowania robota, w którym przedmiotem pracy jest ciało ludzkie, musi, po dokładnej ocenie przez użytkownika lub twórcę aplikacji i zapewnieniu bezpieczeństwa personelu, wyposażyć korpus robota w bezpieczny, niezawodny, w pełni przetestowany i certyfikowany system ochrony bezpieczeństwa, aby chronić personel.
Niniejsza instrukcja służy wyłącznie jako instrukcja certyfikacji bezpieczeństwa dla klienta. Personel konserwacyjny musi posiadać odpowiednie kwalifikacje. FAIRINO odmawia wszelkiej odpowiedzialności za operacje wykonywane przez niekwalifikowany personel.
Ważne
Jeśli robot (korpus robota, moduł zasilania, moduł rozszerzający) został uszkodzony, zmieniony lub zmodyfikowany z winy człowieka, FAIRINO odmawia wszelkiej odpowiedzialności. FAIRINO nie ponosi odpowiedzialności za jakiekolwiek uszkodzenia robota lub jakiegokolwiek innego urządzenia spowodowane błędami w programach napisanych przez klienta.
Informacje zawarte w niniejszej instrukcji nie obejmują projektowania, instalacji i obsługi kompletnego zastosowania robota ani wszystkich urządzeń peryferyjnych, które mogą mieć wpływ na bezpieczeństwo tego kompletnego systemu. Projekt i instalacja tego kompletnego systemu muszą być zgodne z wymaganiami bezpieczeństwa określonymi w normach i przepisach kraju, w którym robot jest instalowany.
Integrator FAIRINO jest odpowiedzialny za zapewnienie zgodności z odpowiednimi przepisami krajowymi oraz za zapewnienie, że w kompletnym zastosowaniu robota nie występują żadne istotne zagrożenia. Obejmuje to między innymi:
Przeprowadzenie oceny ryzyka dla kompletnego systemu robotycznego.
Podłączenie innych maszyn i dodatkowych urządzeń bezpieczeństwa zdefiniowanych w ocenie ryzyka.
Ustanowienie odpowiednich ustawień bezpieczeństwa w oprogramowaniu.
Zapewnienie, że użytkownik nie będzie modyfikować żadnych środków bezpieczeństwa.
Potwierdzenie, że projekt i instalacja całego systemu robotycznego są prawidłowe.
Określenie instrukcji użytkowania.
Umieszczenie na robocie odpowiednich oznaczeń i danych kontaktowych integratora.
Zebranie całej dokumentacji z plików technicznych, w tym niniejszej instrukcji.
Żadnych informacji dotyczących bezpieczeństwa zawartych w niniejszej instrukcji nie należy uważać za ogólne gwarancje bezpieczeństwa robota. Nawet przy przestrzeganiu wszystkich instrukcji bezpieczeństwa nadal może dojść do obrażeń ciała lub uszkodzenia sprzętu.
Na produkcie umieszczono następujące symbole ostrzegawcze bezpieczeństwa.
Ważne
Nazwa: Niebezpieczeństwo
Funkcja: Oznacza to zbliżającą się niebezpieczną sytuację związaną z energią elektryczną, która, jeśli nie zostanie uniknięta, może spowodować śmierć lub poważne obrażenia.
Ważne
Nazwa: Ryzyko porażenia prądem
Funkcja: Oznacza to zbliżającą się niebezpieczną sytuację porażenia prądem, która, jeśli nie zostanie uniknięta, może spowodować śmierć lub poważne obrażenia w wyniku porażenia prądem.
Ważne
Nazwa: Ryzyko oparzenia
Funkcja: Oznacza to gorącą powierzchnię, która może stwarzać zagrożenie. Jeśli dojdzie do kontaktu, może spowodować obrażenia ciała.
Ważne
Nazwa: Uziemienie
Funkcja: Oznacza to, że urządzenie wymaga niezawodnego uziemienia.
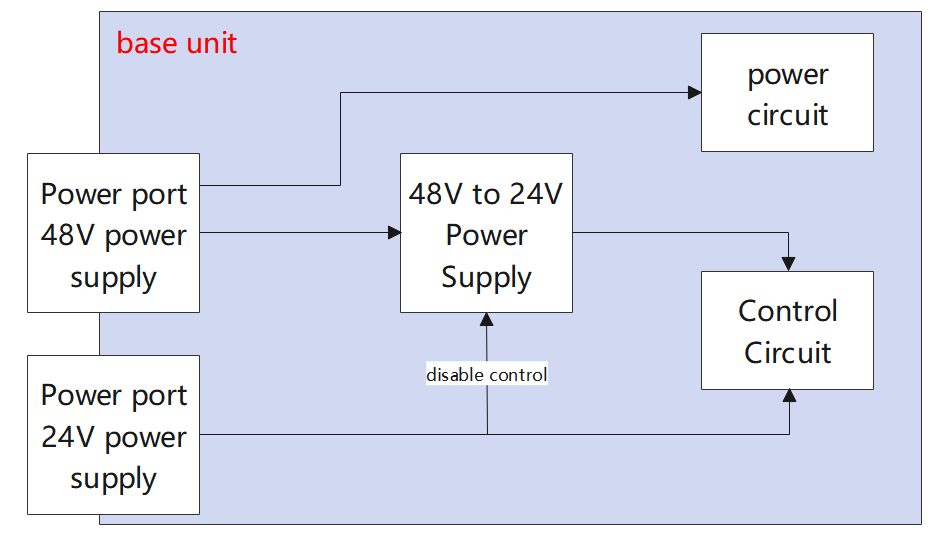
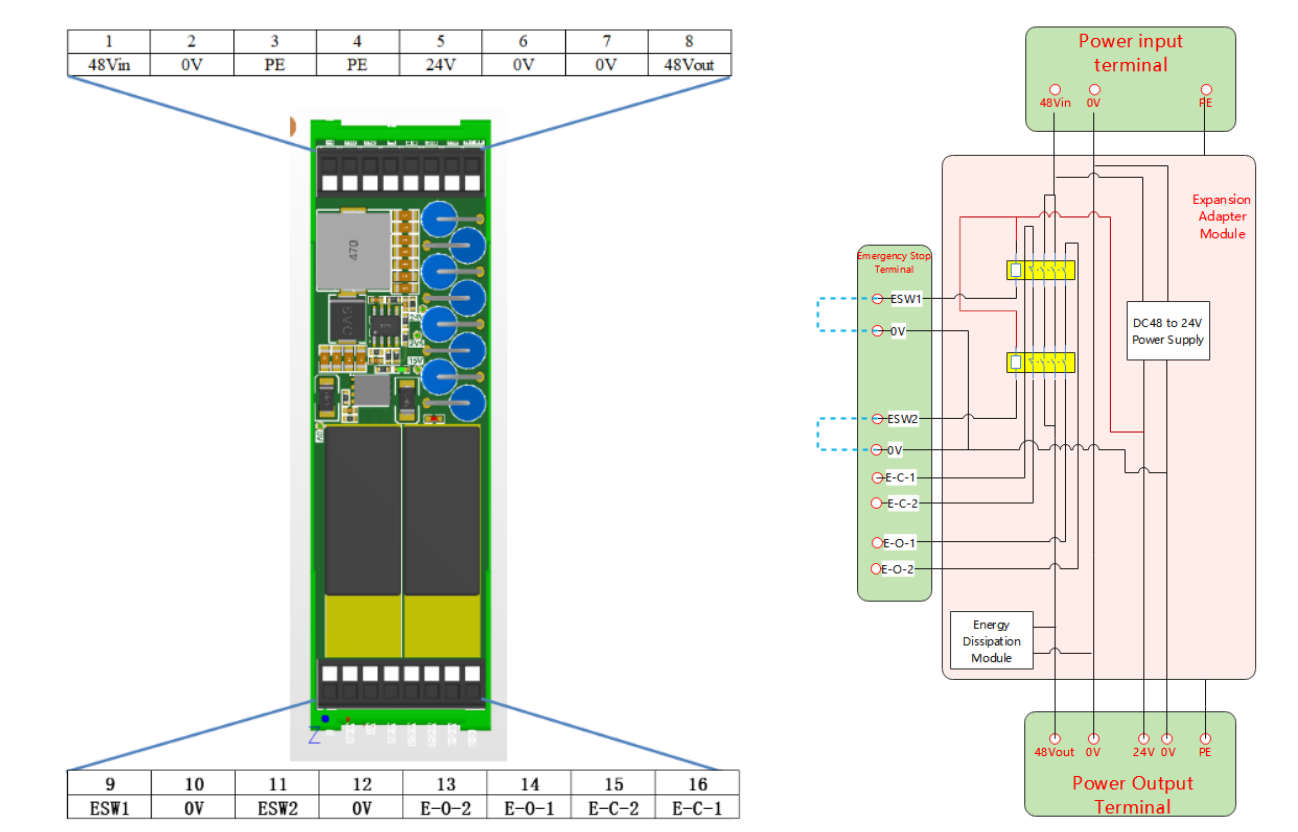
3.5.12.2. Definicja podstawy FR3MT i 3C oraz interfejsów modułów
Moduł rozszerzający posiada funkcję awaryjnego zatrzymania i funkcję rozładowania energii. Zewnętrzne zaciski modułu rozszerzającego oraz wewnętrzny schemat topologii przedstawiono poniżej:
W większości scenariuszy zastosowań użytkownik może zaspokoić swoje potrzeby, wybierając tylko wiązkę kabli użytkownika. Konkretne scenariusze zastosowań są następujące:
Nr
Kategoria scenariusza
Warunki zasilania użytkownika
Wymagania funkcjonalne użytkownika
Zalecana konfiguracja
1
Podstawowa aplikacja
Zasilacz DC 48 V / 10 A
Brak funkcji awaryjnego zatrzymania/rozładowania energii
Wiązka kabli użytkownika
2
Rozszerzona bezpieczeństwo
Zasilacz DC 48 V / 10 A
Wymagana funkcja awaryjnego zatrzymania + rozładowania energii
Wiązka kabli użytkownika + moduł rozszerzający
3
Zasilanie niezależne
Brak zasilacza DC 48 V / 10 A
Brak funkcji awaryjnego zatrzymania/rozładowania energii
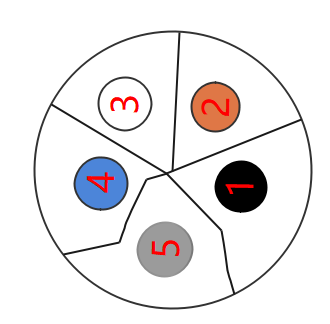
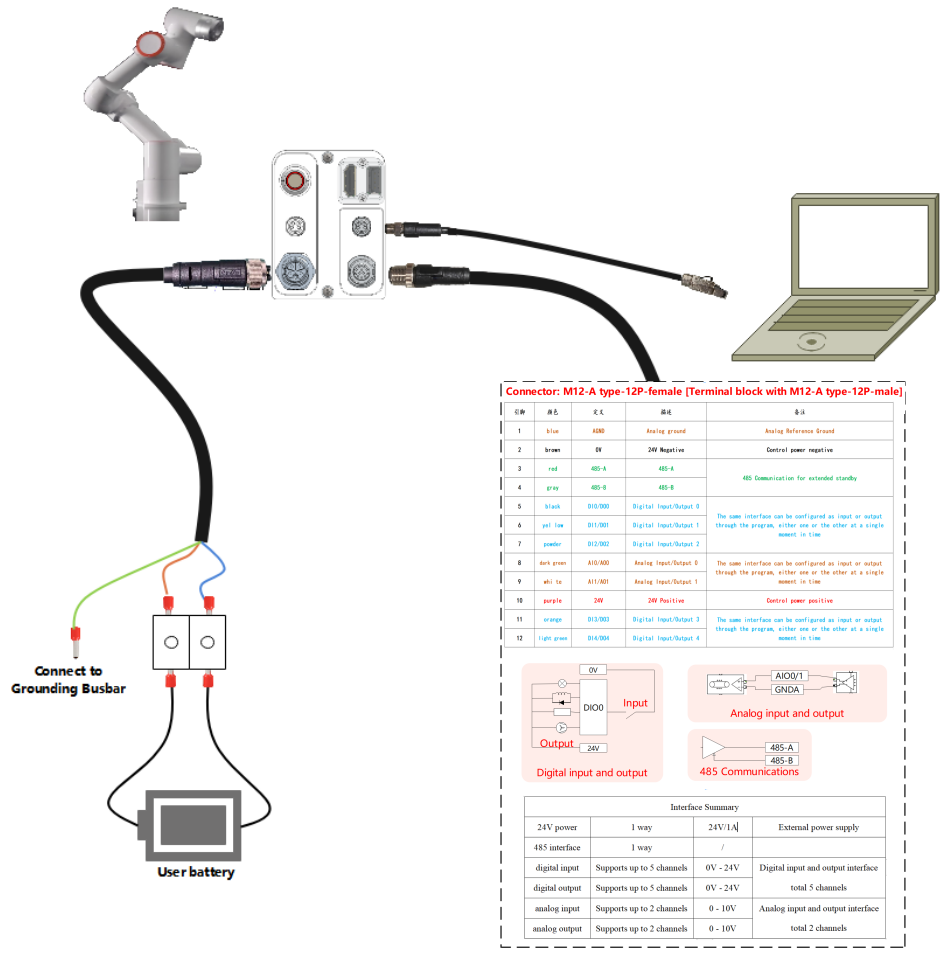
Tylko wiązka kabli użytkownika. Sposób podłączenia jest następujący:
Podłącz gniazdo żeńskie M12-L-5P przewodu zasilającego do podstawy. Na końcu znajduje się 5 przewodów z oznaczeniami 48V/0V/24V/0V/PE. Podłącz trzy przewody 48V/0V/PE do odpowiednich zacisków zasilania użytkownika. Przewody 24V/0V należy odizolować i pozostawić niepodłączone.
Podłącz wtyk męski M12-A-12P i wtyk męski M8-A-4P do odpowiednich zacisków podstawy.
Wykres 3.5-20 Sposób podłączenia wiązki kabli użytkownika
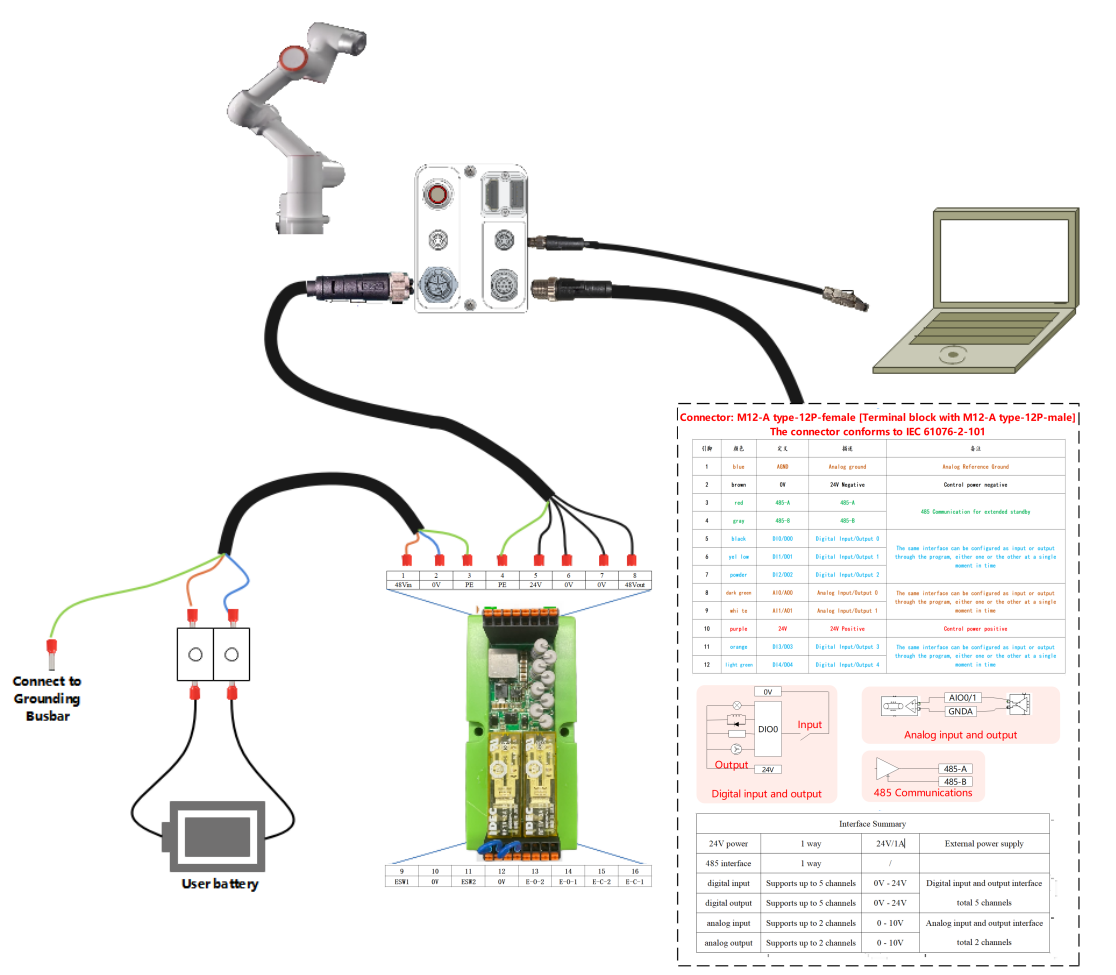
Wiązka kabli użytkownika + moduł rozszerzający. Sposób podłączenia jest następujący:
Kabel łączący moduł rozszerzający o długości 0,5 M ma na obu końcach 3 przewody z oznaczeniami 48V/0V/PE. Strona wejściowa kabla jest podłączona do odpowiednich zacisków zasilania użytkownika. Strona wyjściowa jest włożona w pozycje 48Vin/0V/PE modułu rozszerzającego.
Podłącz gniazdo żeńskie M12-L-5P przewodu zasilającego do podstawy. Na końcu znajduje się 5 przewodów z oznaczeniami 48V/0V/24V/0V/PE. Podłącz 5 przewodów do 48Vout/0V/0V/24V/PE modułu rozszerzającego.
Podłącz wtyk męski M12-A-12P i wtyk męski M8-A-4P do odpowiednich zacisków podstawy.
Wykres 3.5-21 Sposób podłączenia wiązki kabli użytkownika + modułu rozszerzającego
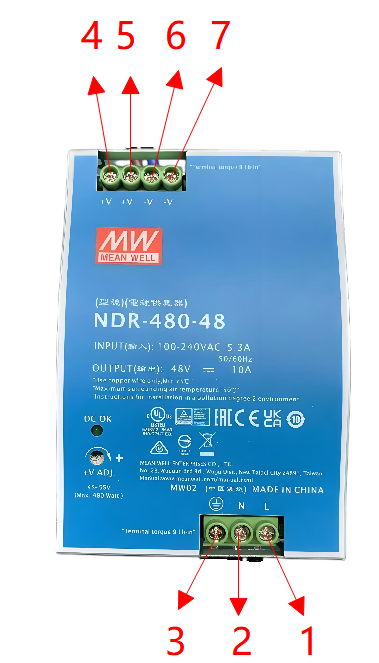
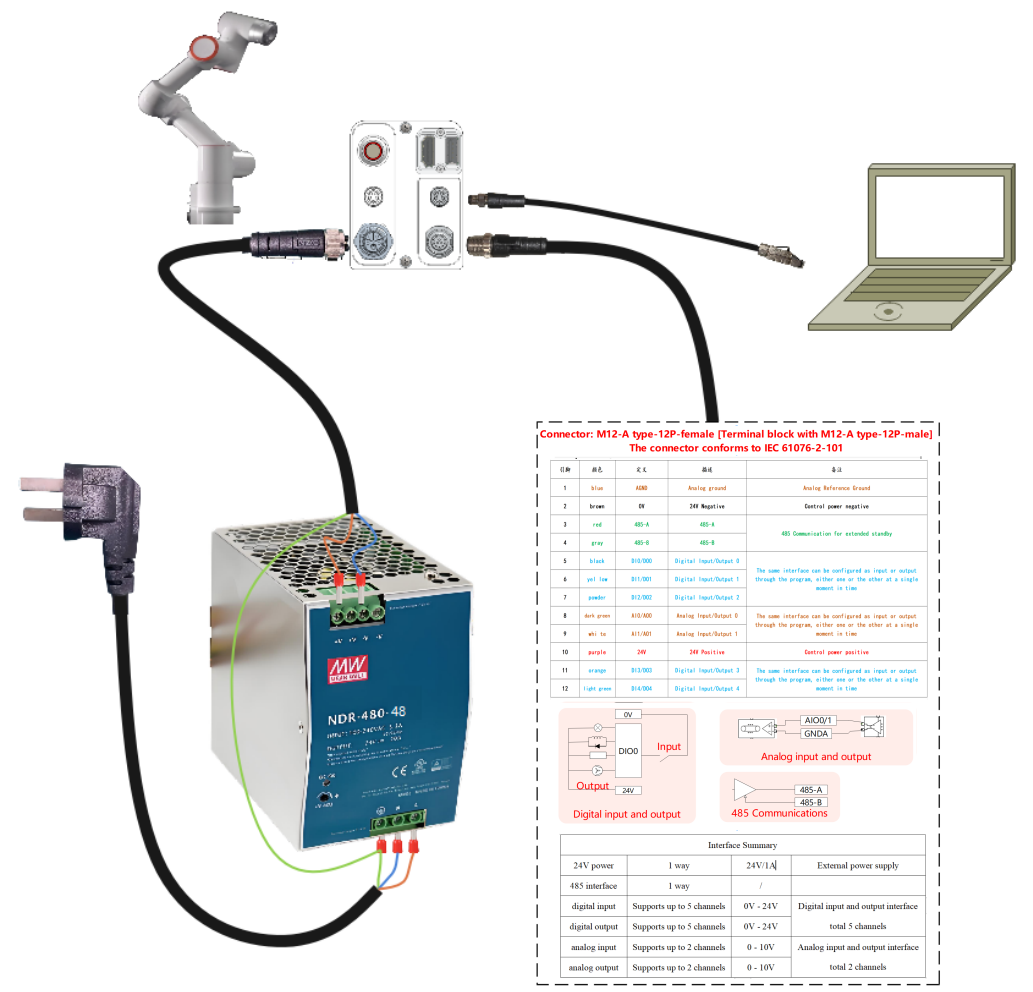
Wiązka kabli użytkownika + moduł zasilania + przewód zasilający. Sposób podłączenia jest następujący:
Przewód zasilający o długości 1,5 M ma na końcu 3 przewody z oznaczeniami L/N/PE. Podłącz je do odpowiednich zacisków wejściowych zasilacza NDR-480-48.
Podłącz gniazdo żeńskie M12-L-5P przewodu zasilającego do podstawy. Na końcu znajduje się 5 przewodów z oznaczeniami 48V/0V/24V/0V/PE. Podłącz trzy przewody 48V/0V/PE do odpowiednich zacisków zasilania użytkownika. Przewody 24V/0V należy odizolować i pozostawić niepodłączone.
Podłącz wtyk męski M12-A-12P i wtyk męski M8-A-4P do odpowiednich zacisków podstawy.
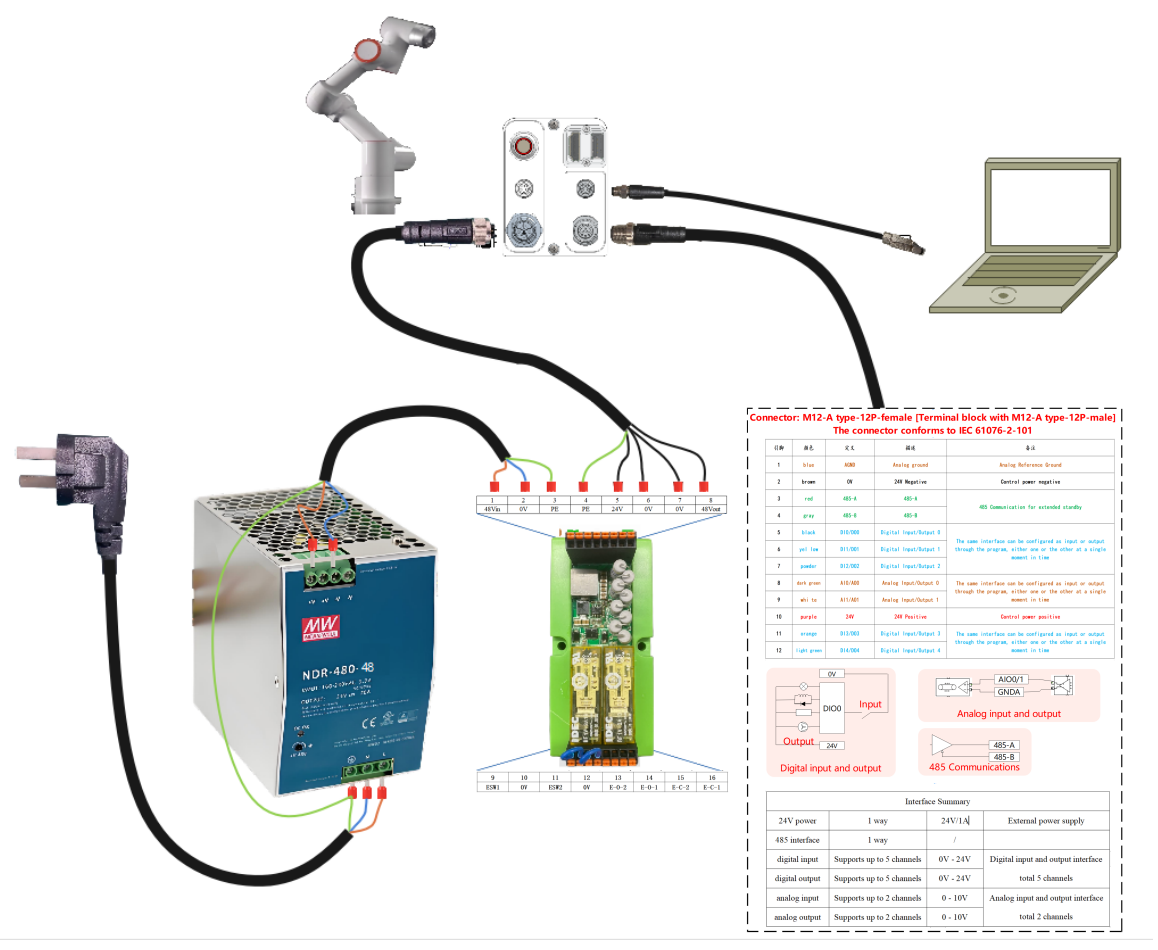
Wiązka kabli użytkownika + moduł zasilania + przewód zasilający + moduł rozszerzający. Sposób podłączenia jest następujący:
Przewód zasilający o długości 1,5 M ma na końcu 3 przewody z oznaczeniami L/N/PE. Podłącz je do odpowiednich zacisków wejściowych zasilacza NDR-480-48.
Kabel łączący moduł rozszerzający o długości 0,5 M ma na obu końcach 3 przewody z oznaczeniami 48V/0V/PE. Strona wejściowa kabla jest podłączona do odpowiednich zacisków wyjściowych zasilacza NDR-480-48, a przewód PE jest wspólny z wejściem. Strona wyjściowa jest włożona w pozycje 48Vin/0V/PE modułu rozszerzającego.
Podłącz gniazdo żeńskie M12-L-5P przewodu zasilającego do podstawy. Na końcu znajduje się 5 przewodów z oznaczeniami 48V/0V/24V/0V/PE. Podłącz 5 przewodów do 48Vout/0V/0V/24V/PE modułu rozszerzającego.
Podłącz wtyk męski M12-A-12P i wtyk męski M8-A-4P do odpowiednich zacisków podstawy.
Do sterowania robotem i uzyskiwania do niego dostępu można użyć komputera lub tabletu. Sposób podłączenia opisano w sekcji 3.5.3. Ponadto użytkownik może również skorzystać z naszego panelu operatorskiego FR-HMI, który jest opcjonalnym akcesorium.