1. Wprowadzenie do wtyczki
Wtyczka FAIRINO MoveIt2 to wtyczka zapewniająca wsparcie dla sterowania ruchem i planowania trajektorii robotów FAIRINO. Dzięki wtyczce FAIRINO MoveIt2 można realizować złożone funkcje, takie jak sterowanie ruchem robota, planowanie trajektorii, rozwiązywanie odwrotnej kinematyki i wykrywanie kolizji w czasie rzeczywistym. Nadaje się ona do różnych scenariuszy zastosowań ramion mechanicznych, takich jak przemysł, spawanie, produkcja, automatyczny załadunek i rozładunek, paletyzacja, medycyna itp.
2. Szybki start
W tym rozdziale opisano, jak skonfigurować środowisko uruchomieniowe aplikacji.
Zaleca się używanie systemu Ubuntu 22.04 LTS (Jammy). Po zakończeniu instalacji systemu można zainstalować ROS2. Zalecana wersja to ros2-humble. Instrukcję instalacji ROS2 można znaleźć pod adresem: https://docs.ros.org/en/humble/index.html.
2.1. Instalacja i konfiguracja pakietu wtyczki FAIRINO MoveIt2
2.1.1. Klonowanie wtyczki FAIRINO MoveIt2
Sklonuj wtyczkę FAIRINO MoveIt2 do katalogu lokalnego, a następnie przejdź do katalogu docelowego cd. Główne pliki obejmują fairino_msgs – pakiet typów danych do transmisji danych robota FAIRINO; fairino_hardware – pakiet wtyczki fairino_hardware robota FAIRINO;
fairino_robot/fairino_description – pakiet wyglądu i plików urdf robota FAIRINO;
fairino_robot/fairino3mt_v6_moveit2_config, fairino_robot/fairino3_v6_moveit2_config, fairino_robot/fairino5_v6_moveit2_config, fairino_robot/fairino10_v6_moveit2_config, fairino_robot/fairino16_v6_moveit2_config, fairino_robot/fairino20_v6_moveit2_config, fairino_robot/fairino30_v6_moveit2_config – pakiety konfiguracyjne moveit2 robotów FAIRINO, fairino_robot/fairino_mtc_demo – przykładowy pakiet kodu mtc robota FAIRINO.


2.1.2. Kompilacja pakietów funkcjonalnych
Kompilacja pakietu funkcjonalnego fairino_msgs
1cd ros2_ws
2colcon build --packages-select fairino_msgs
3source install/setup.bash
Kompilacja pakietu funkcjonalnego fairino_hardware
1cd ros2_ws
2colcon build --packages-select fairino_hardware
3source install/setup.bash
Kompilacja pakietu funkcjonalnego fairino_description
1cd ros2_ws
2colcon build --packages-select fairino_description
3source install/setup.bash
Kompilacja pakietu konfiguracyjnego moveit2 robota FAIRINO, na przykładzie fairino5_v6_moveit2_config
1cd ros2_ws
2colcon build --packages-select fairino5_v6_moveit2_config
3source install/setup.bash
Kompilacja przykładowego pakietu kodu fairino_mtc_demo robota FAIRINO. Jeśli ten przykładowy pakiet kodu nie znajduje się w oficjalnym obszarze roboczym ros2_ws, skontaktuj się z działem obsługi posprzedażowej w celu jego uzyskania.
1cd ros2_ws
2colcon build --packages-select fairino_mtc_demo
3source install/setup.bash
2.2. Konfiguracja modelu Moveit2 ramienia mechanicznego FAIRINO
Jeśli nie chcesz używać oficjalnie dostarczonego pakietu konfiguracyjnego moveit2_config robota, możesz skonfigurować niestandardowy pakiet konfiguracyjny moveit2_config robota za pomocą moveit_setup_assistant.
2.2.1. Tworzenie obszaru roboczego
Utwórz obszar roboczy i pakiet funkcjonalny
1mkdir -p test_fa_ws/src
2cd test_fa_ws/src
3mkdir fairino5_v6_robot_moveit_config
4cd ..
5cd ..
Kompilacja pakietu funkcjonalnego i wykonanie source
1colcon build
2source install/setup.bash
Uruchomienie moveit_setup_assistant w celu konfiguracji robota
1ros2 launch moveit_setup_assistant setup_assistant.launch.py
2.2.2. Konfiguracja robota
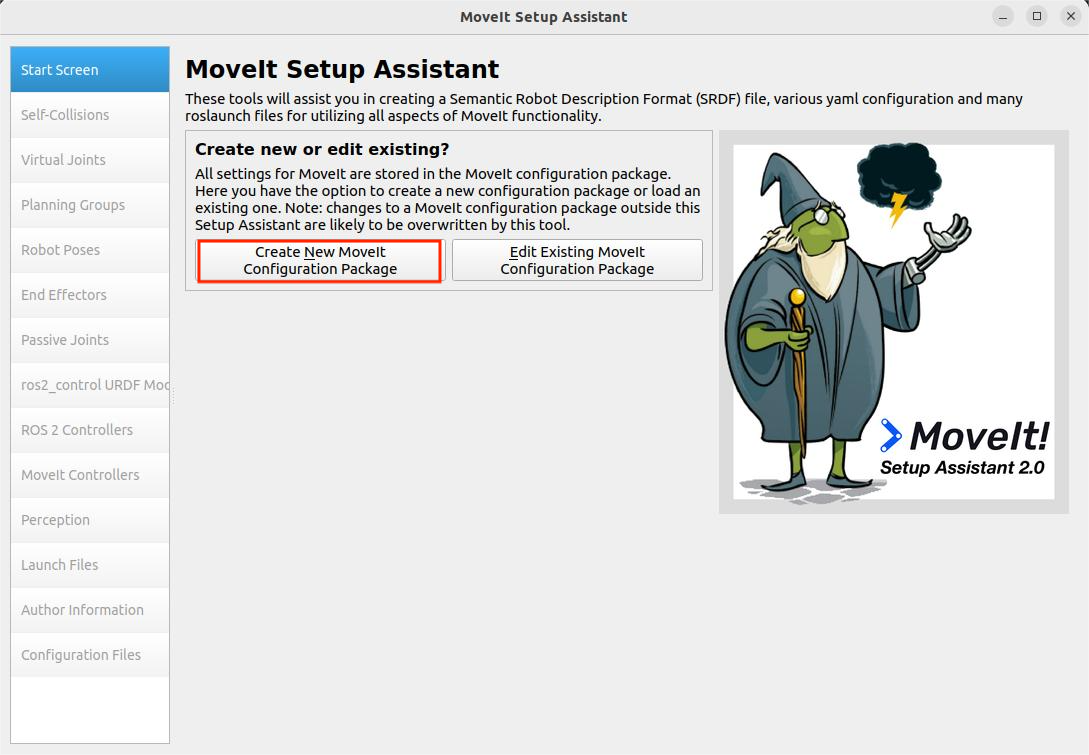
Uruchomienie interfejsu konfiguracji
W katalogu test_fa_ws otwórz terminal. W interfejsie konfiguracji wybierz „Create New Moveit Configuration Package”, aby utworzyć nowy pakiet konfiguracyjny moveit.
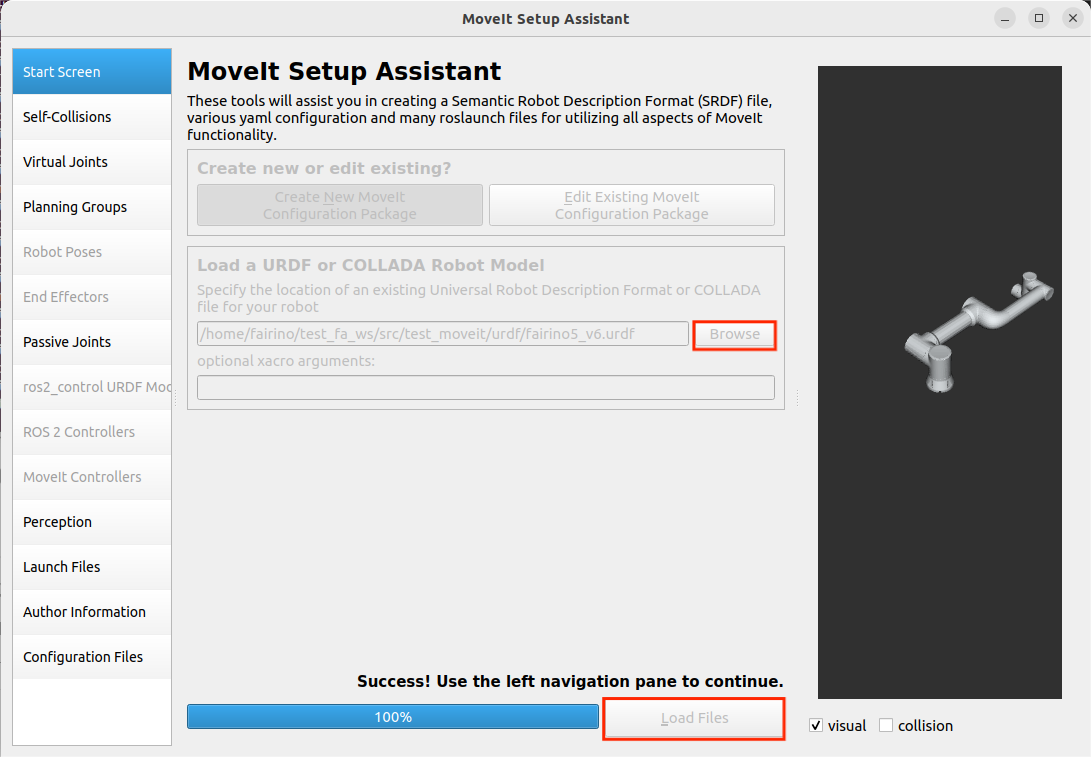
Następnie wybierz plik opisu robota, czyli plik .urdf, a następnie wybierz „Load Files”, aby załadować model robota. Po prawej stronie wyświetli się załadowany model robota.
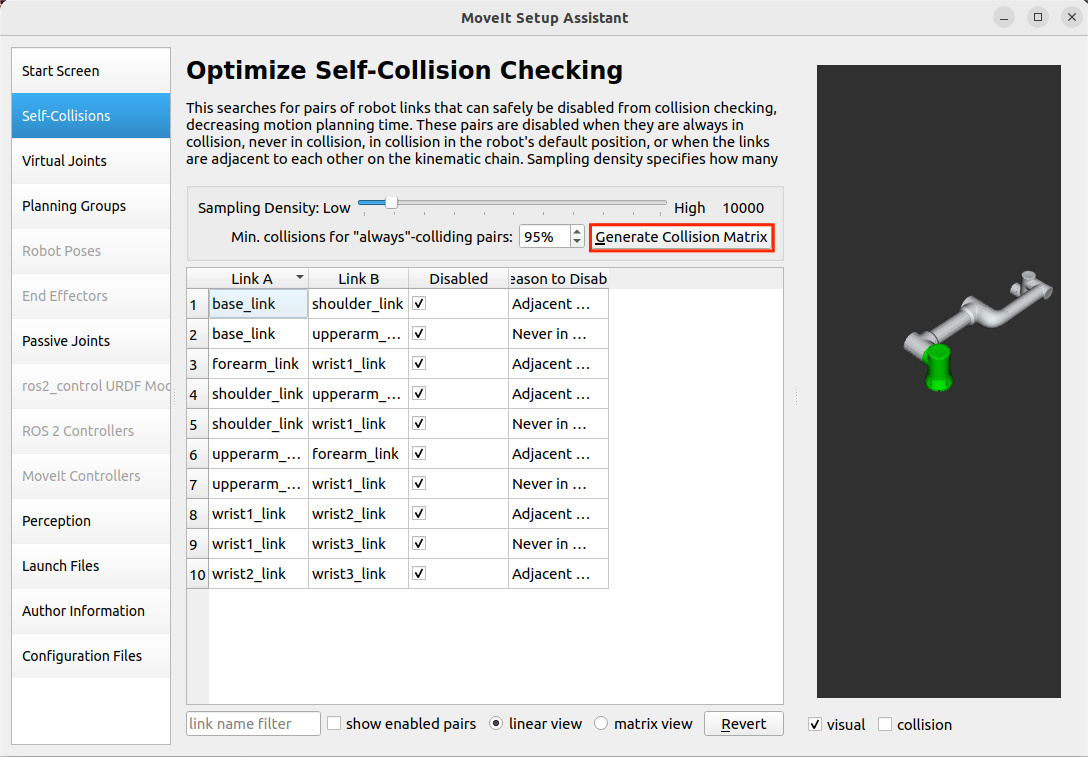
Konfiguracja Self-Collisions
Self-Collisions to ustawienia kolizji robota. Kliknij „Generate Collision Matrix”, aby automatycznie wygenerować macierz kolizji stawów. Spowoduje to usunięcie kolizji między parami stykających się łączników oraz między łącznikami, które nigdy się nie stykają, konfigurując w ten sposób macierz kolizji stawów robota, aby uniknąć obliczania kolizji na powierzchniach styku. Kliknij „Generate Collision Matrix”, aby automatycznie wygenerować.
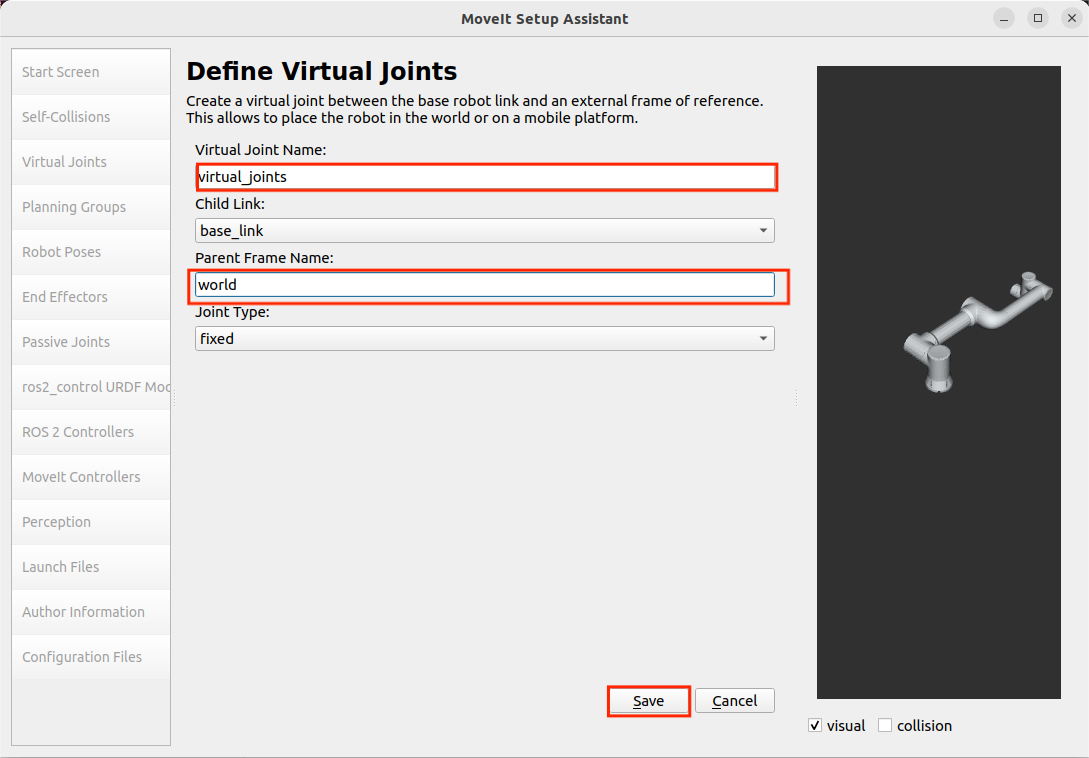
Konfiguracja Virtual Joints
Virtual Joints to wirtualne osie robota. Gdy robot jest zamontowany na ruchomej platformie, należy ustawić dla niego wirtualne osie. Ustaw nazwę wirtualnej osi, łącznik podrzędny, typ stawu itp. Gdy ruchoma platforma się porusza, wirtualna oś porusza się synchronicznie, wprawiając w ruch robota, umożliwiając mu poruszanie się wraz z ruchomą platformą. W tym przypadku robot zostanie umieszczony bezpośrednio w układzie współrzędnych świata i nazwany virtual_joints.
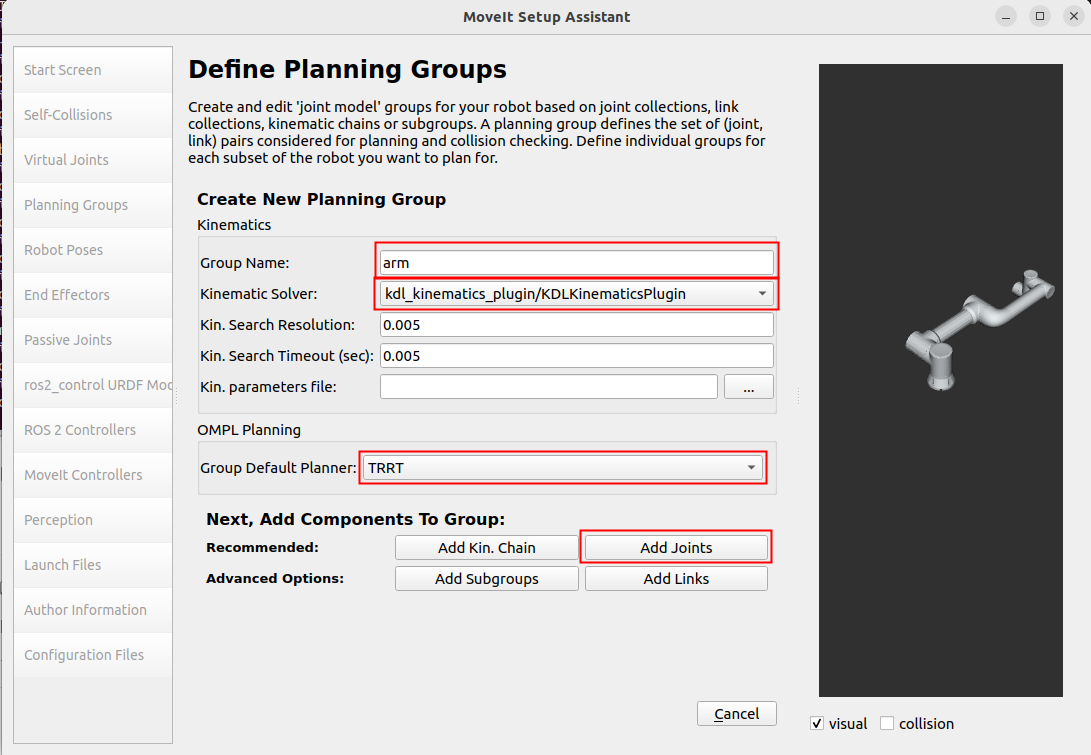
Konfiguracja Planning Groups
Planning Groups to grupy planowania robota. Łączą one stawy, które muszą być brane pod uwagę podczas obliczeń kinematycznych, w ramach tej samej grupy planowania w celu przeprowadzenia ujednoliconych obliczeń kinematyki prostej i odwrotnej. Na przykład, umieszczając robota na wózku AGV, a następnie instalując uchwyt na końcówce robota, można przypisać cztery stawy wózka AGV do jednej grupy planowania, sześć stawów robota do jednej grupy planowania, a jeden staw uchwytu do jednej grupy planowania do obliczeń kinematycznych.
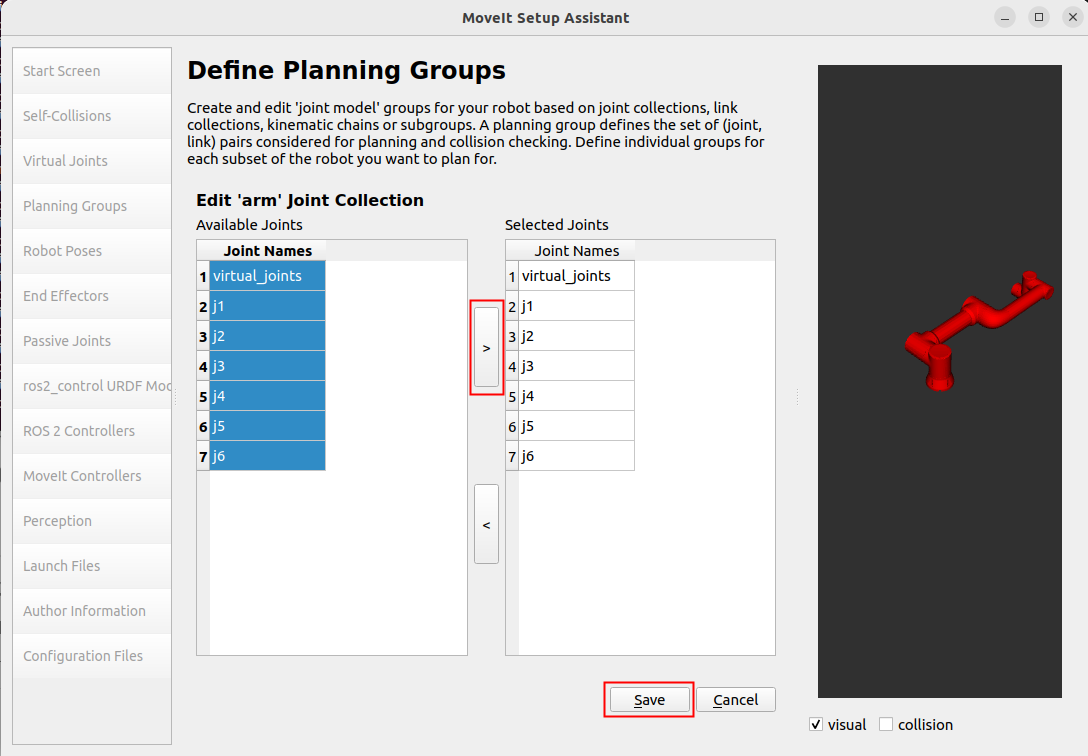
Ponieważ w tym przypadku nie ma uchwytu, dodana zostanie tylko grupa stawów robota, czyli grupa arm. Najpierw dodaj grupę arm. W sekcji Kinematic Solver wybierz kdl_kinematics_plugin/KDLKinematicsPlugin. Następnie dla Group Default Planner wybierz TRRT. Następnie kliknij „Add Joints”, aby dodać stawy do tej grupy planowania.
Stawy arm można zaznaczyć wiele, przytrzymując klawisz Shift, kliknąć «>», aby dodać, a następnie kliknąć „Save”, aby zapisać.
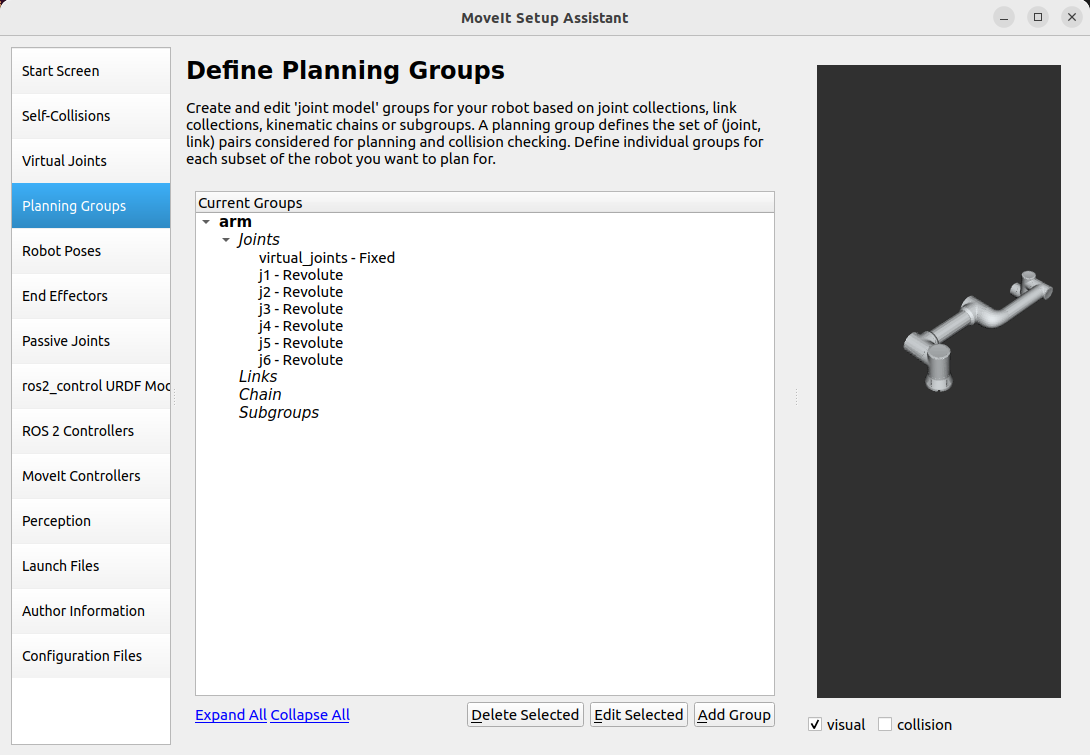
Zdefiniowana grupa planowania wygląda następująco:
Konfiguracja Robot Poses
Robot Poses to wstępnie ustawione pozy robota. Definiują one pewne wstępnie ustawione pozy dla każdej grupy planowania. Dla grupy arm zdefiniuj pozycję home. Tę pozycję można wybrać dowolnie.
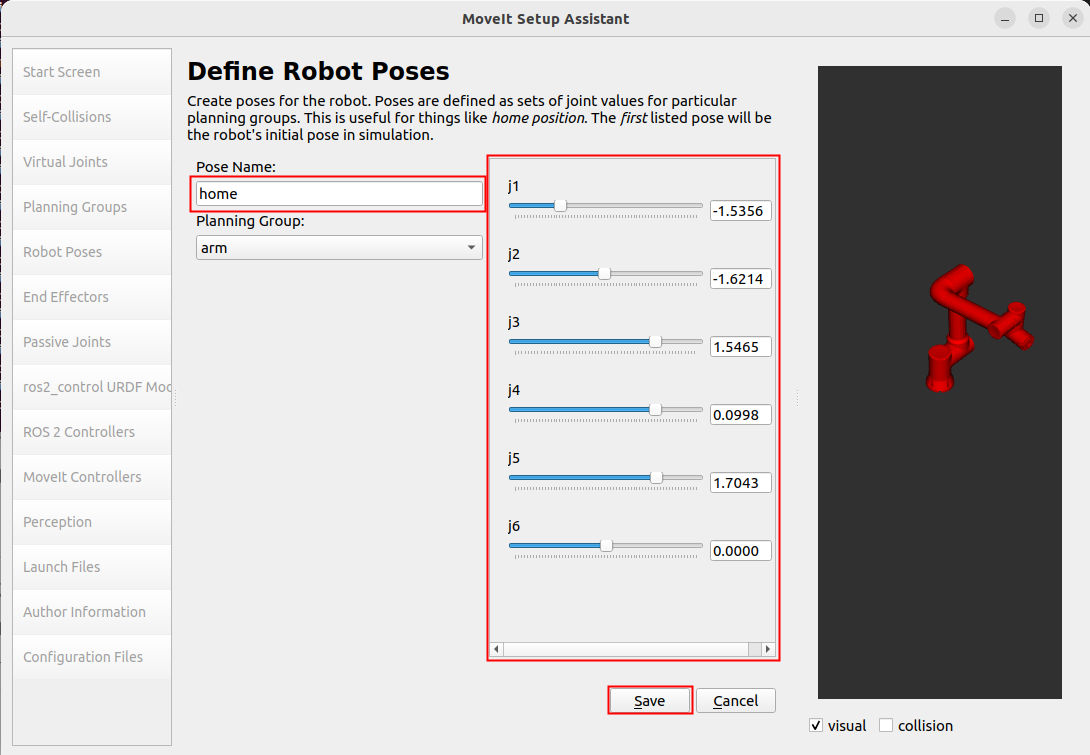
Robot Poses umożliwia zdefiniowanie wstępnie ustawionych pozycji dla każdej grupy planowania. Jeśli robot posiada uchwyt, można dodać grupę planowania uchwytu w sekcji Planning Groups, a następnie podczas ustawiania pozycji w Robot Poses można ustawić wstępnie ustawione pozycje dla uchwytu.
Konfiguracja End Effectors
End Effectors to mechanizmy końcowe robota. Grupa planowania mechanizmu końcowego to hand. Domyślnie łącznikiem nadrzędnym jest panda_link8. Ponieważ w tym przypadku nie ma mechanizmu końcowego, ten krok można pominąć.
ros2_control URDF Modifications
ros2_control URDF Modifications służy głównie do ustawiania typów danych stawów wysyłanych i odbieranych w sprzężeniu zwrotnym. Można wybrać jeden z trzech typów: pozycja, prędkość, moment obrotowy. W tym przypadku zarówno wysyłane, jak i odbierane dane stawów są ustawione na sterowanie pozycją. Następnie kliknij „Add interfaces”.
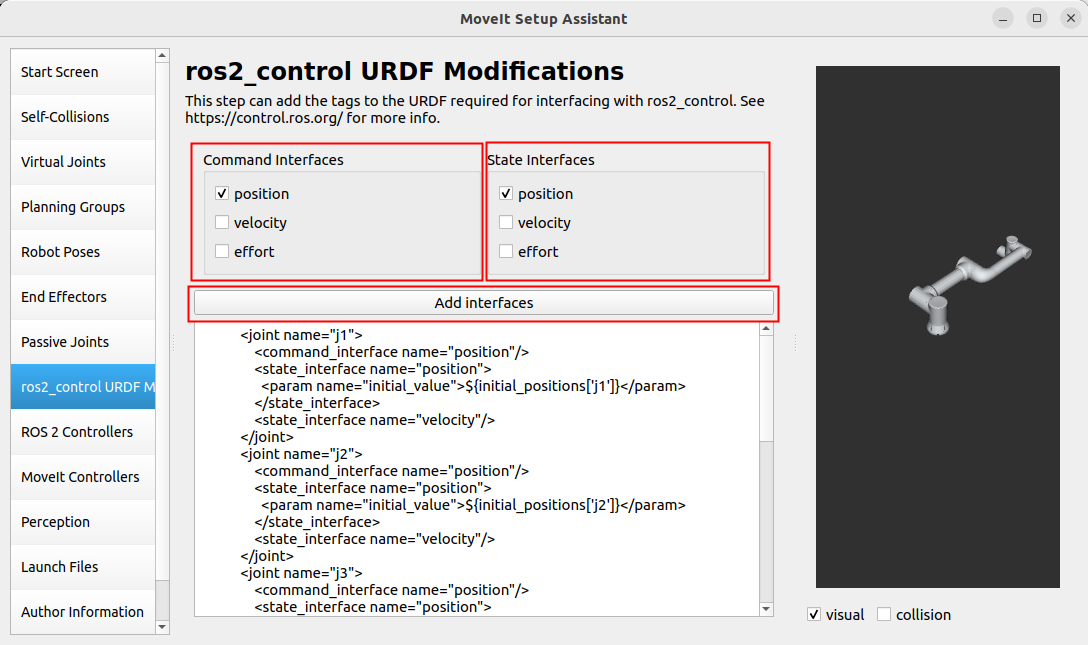
Ważne
Uwaga:
Wybór typu danych stawów musi być zgodny z późniejszą wtyczką fairino_hardware. Zgodnie z danymi przesyłanymi przez wtyczkę fairino_hardware wybierz typ danych stawów do wysłania i sprzężenia zwrotnego. Ponieważ wtyczka fairino_hardware sterująca rzeczywistym ruchem robota używa typu danych position, w tym przypadku zarówno wysyłane, jak i odbierane dane stawów są ustawione na sterowanie pozycją.
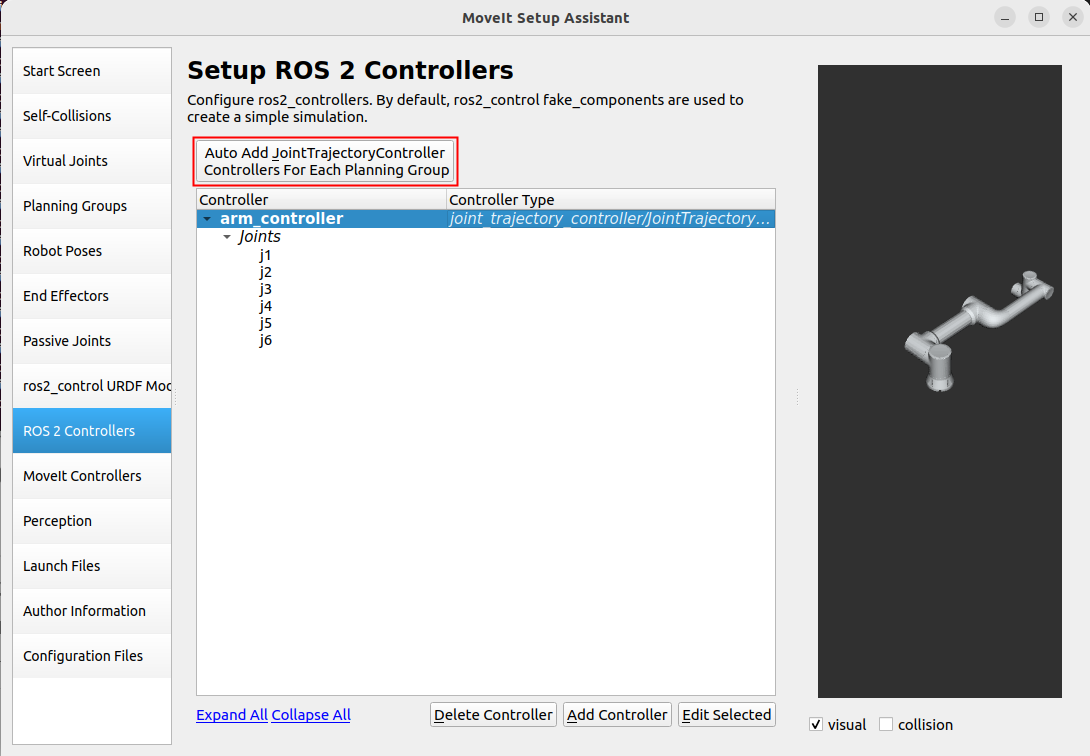
ROS 2 Controllers
ROS 2 Controllers służy głównie do wygenerowania pliku ros2_controllers.yaml. Plik ten ustawia częstotliwość publikacji, nazwy stawów, nazwy kontrolerów, typy kontrolerów itp. Skonfiguruj ROS 2 Controllers, aby skonfigurować kontroler dla każdej grupy planowania. Kliknij „Auto Add JointTrajectoryController Controllers For Each Planning Group”.
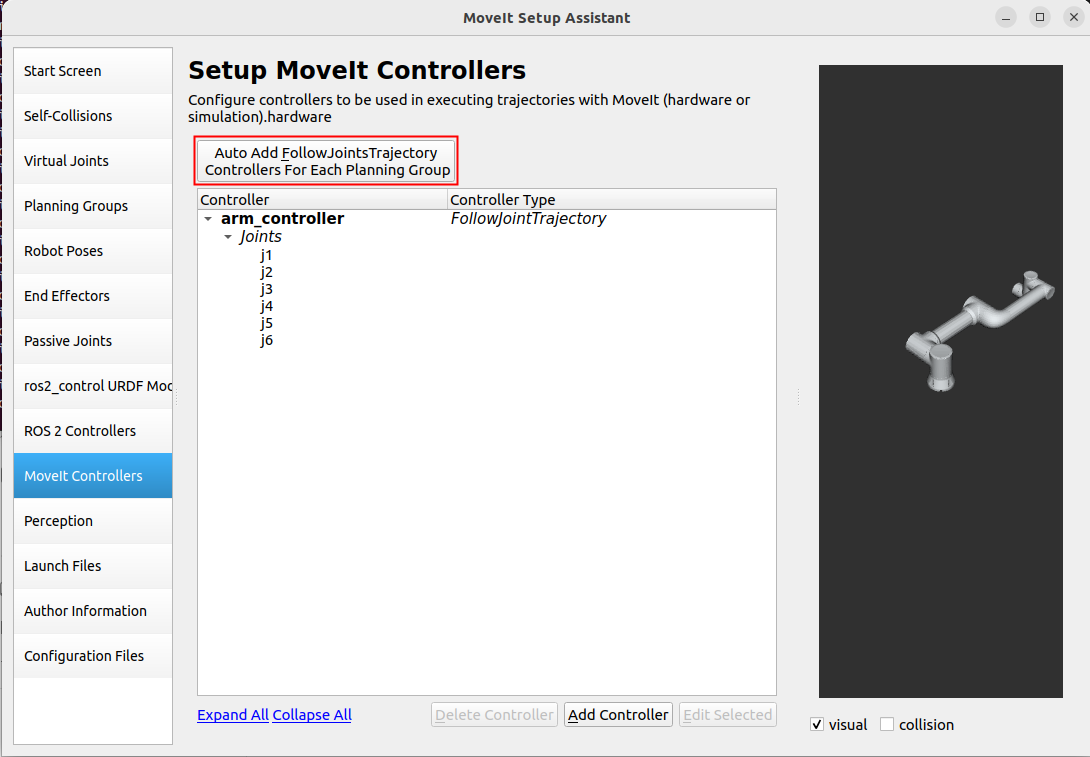
Moveit Controllers
Moveit Controllers służy głównie do wygenerowania pliku moveit_controllers. Plik ten ustawia nazwy kontrolerów, typy kontrolerów itp. Należy pamiętać, że nazwy kontrolerów w moveit_controllers muszą być takie same jak nazwy kontrolerów w ros2_controllers, w przeciwnym razie nie będą działać poprawnie.
Ponadto, gdy nazwy kontrolerów w moveit_controllers są takie same jak nazwy kontrolerów w ros2_controllers, typy kontrolerów w moveit_controllers zostaną automatycznie odwzorowane na typy kontrolerów w ros2_controllers. Pozwala to na przesyłanie danych sterujących przez moveit_controllers do ros2_controllers, a następnie przez wtyczki w ros2_controllers do napędzania rzeczywistego ruchu robota.
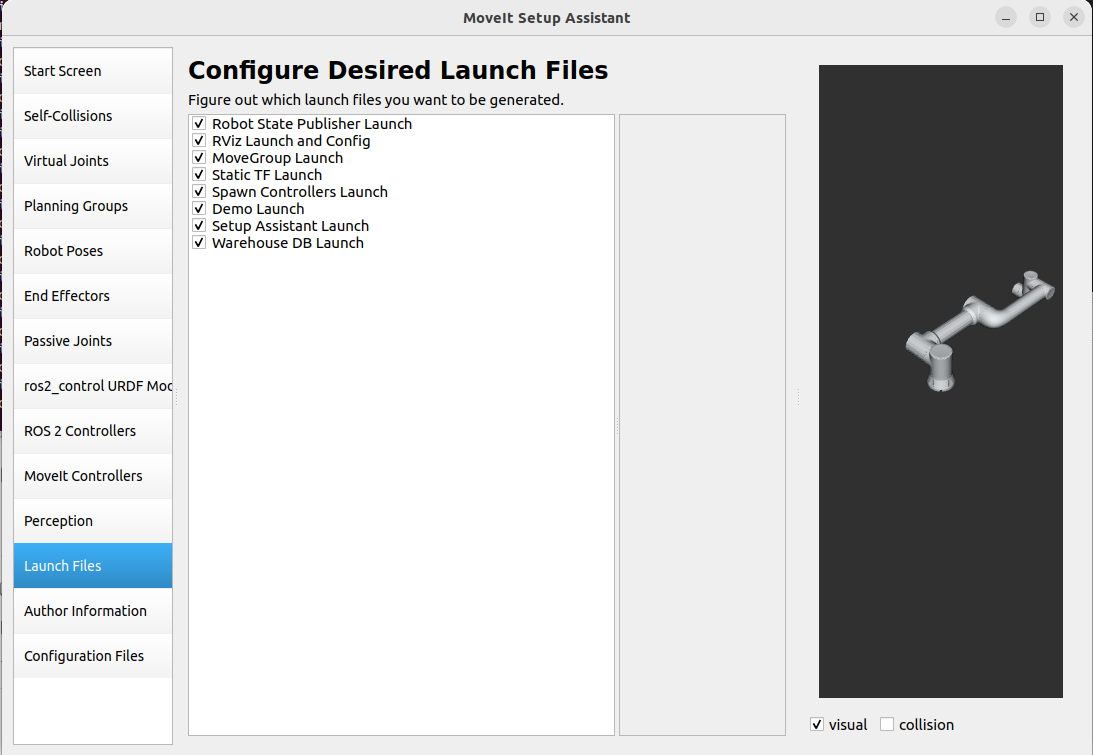
Launch Files
Skonfiguruj Launch Files. Można użyć domyślnej konfiguracji.
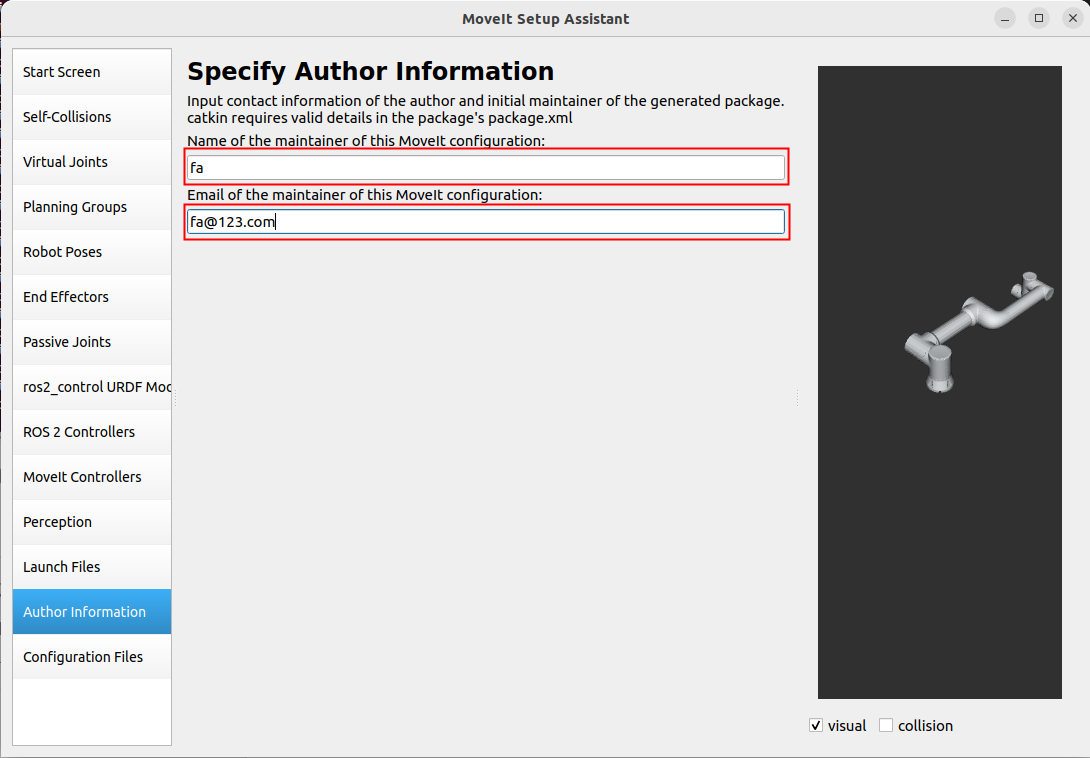
Informacje o autorze
Generowanie plików Launch
Wygeneruj pliki Launch. Wybierz lokalizację generowania. W tym przypadku w ścieżce pliku test_fa_ws/src utwórz folder fairino5_v6_robot_moveit_config do przechowywania plików konfiguracyjnych, a następnie wybierz „Generate”.
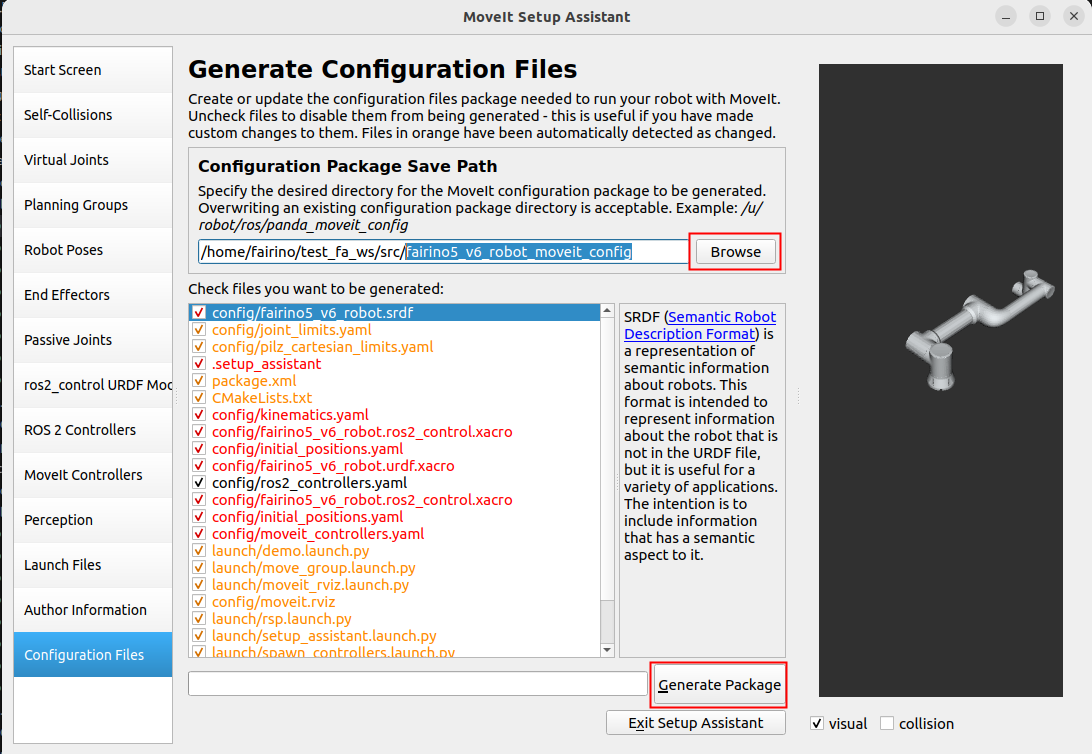
Ponieważ w tym przypadku konfiguracja była już przeprowadzona wcześniej, jeśli jest to konfiguracja początkowa, część „Check files you want to be generated” będzie wyświetlona w kolorze czarnym, co oznacza, że można wygenerować pliki Launch.
2.2.3. Uruchomienie Launch
Po zakończeniu konfiguracji można przystąpić do kompilacji pakietu funkcjonalnego. Niestandardowy pakiet konfiguracyjny moveit2 robota może zastąpić oficjalny pakiet konfiguracyjny moveit2 robota FAIRINO, umożliwiając kompatybilność wtyczek z niestandardowymi robotami użytkownika.
1colcon build --packages-select fairino5_v6_robot_moveit_config
2source install/setup.bash
Następnie uruchom właśnie skonfigurowany plik Launch
1ros2 launch fairino5_v6_robot_moveit_config demo.launch.py
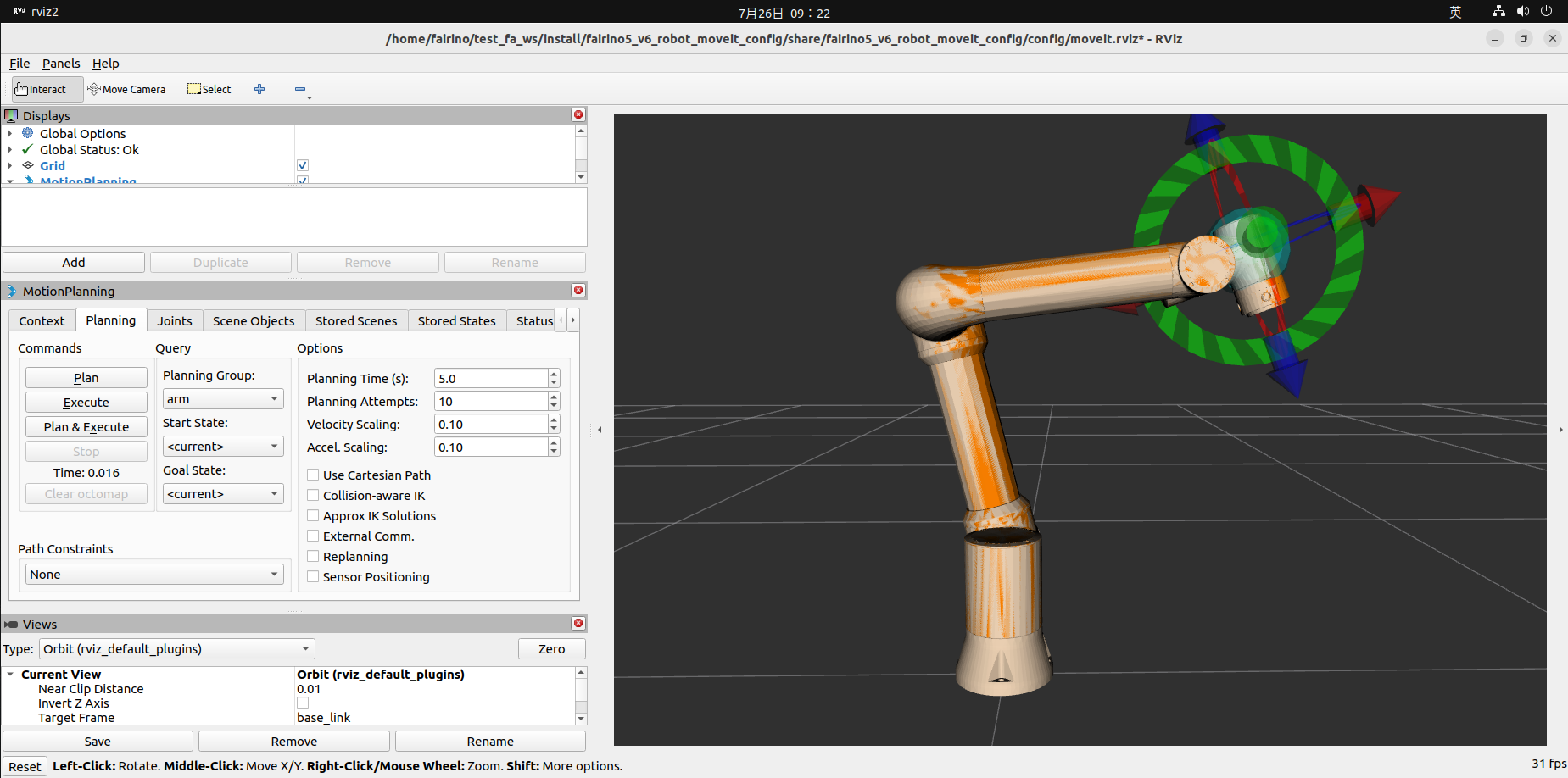
Wyświetli się interfejs rviz2 po zakończeniu konfiguracji.
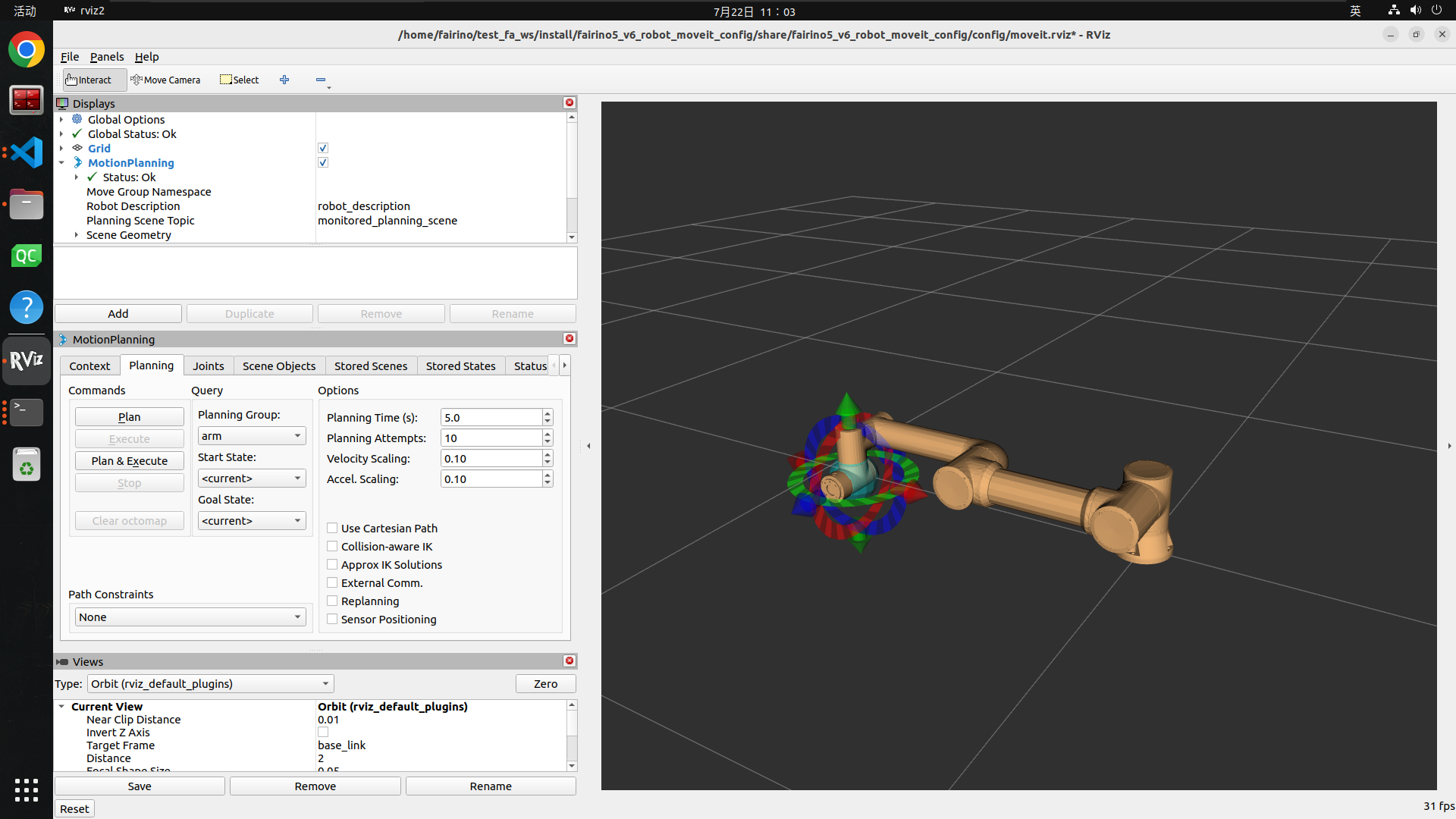
2.2.4. Użycie Moveit2
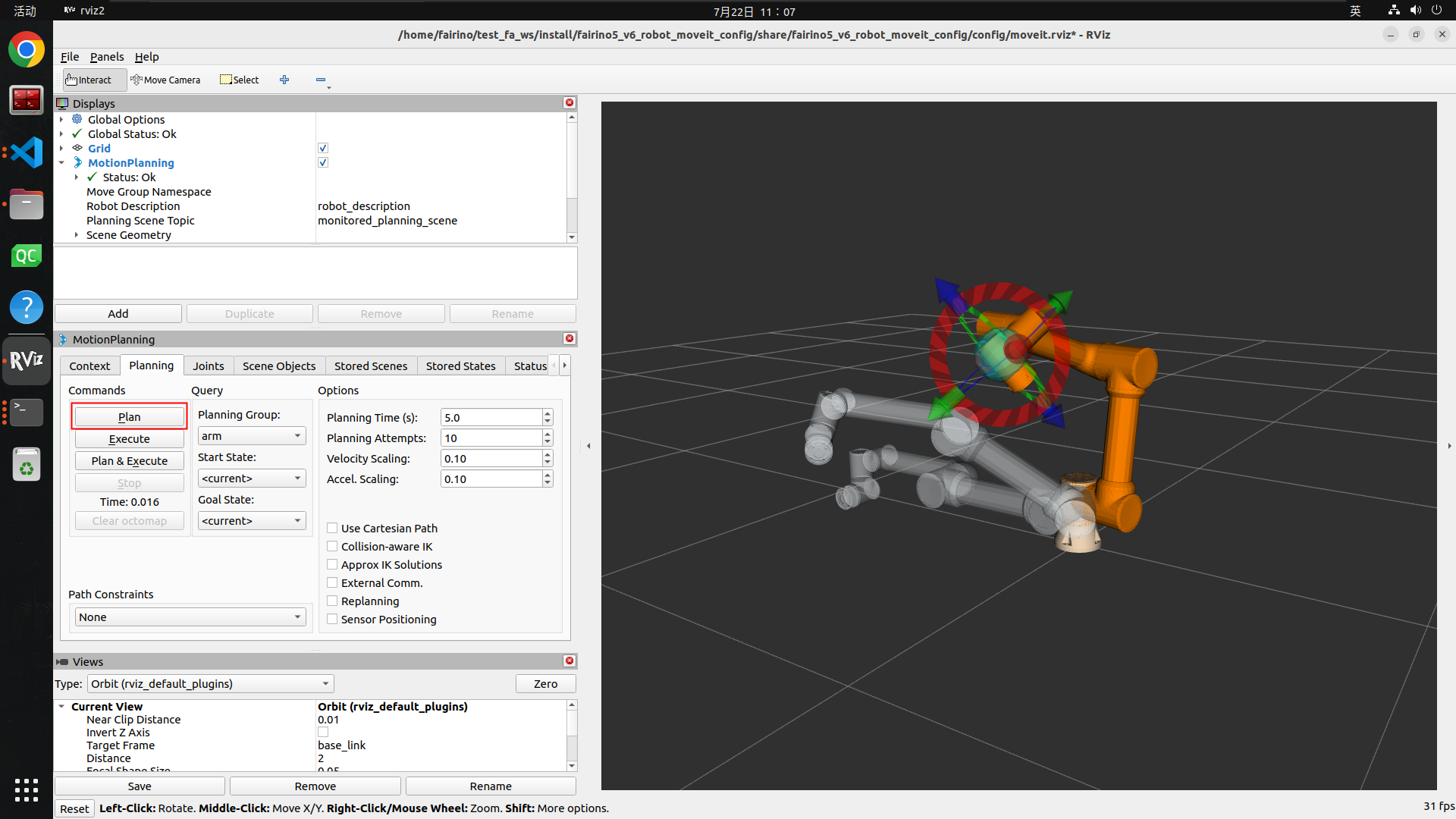
Po otwarciu skonfigurowanego pakietu można ustawić docelową pozycję robota, przeciągając niebieską kulę na końcówce robota w prawym oknie 3D. Następnie można zmienić orientację końcówki robota za pomocą trzech kółek: czerwonego, zielonego i niebieskiego.
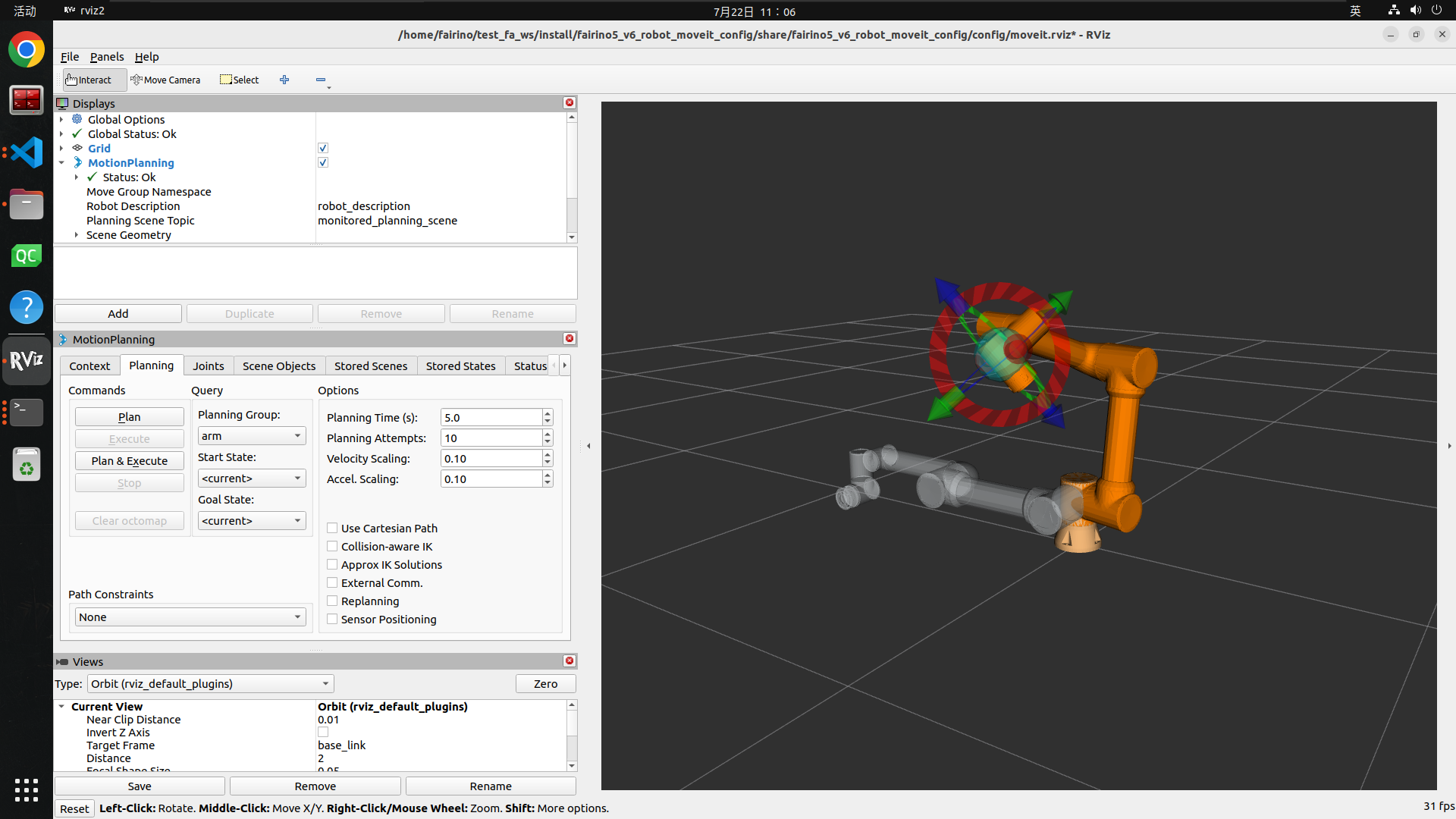
Kliknij przycisk „Plan” po lewej stronie, aby zaplanować trajektorię ruchu robota.
Kliknij przycisk „Execute” po lewej stronie, aby wprawić robota w ruch zgodnie z zaplanowaną trajektorią do docelowej pozycji i orientacji.
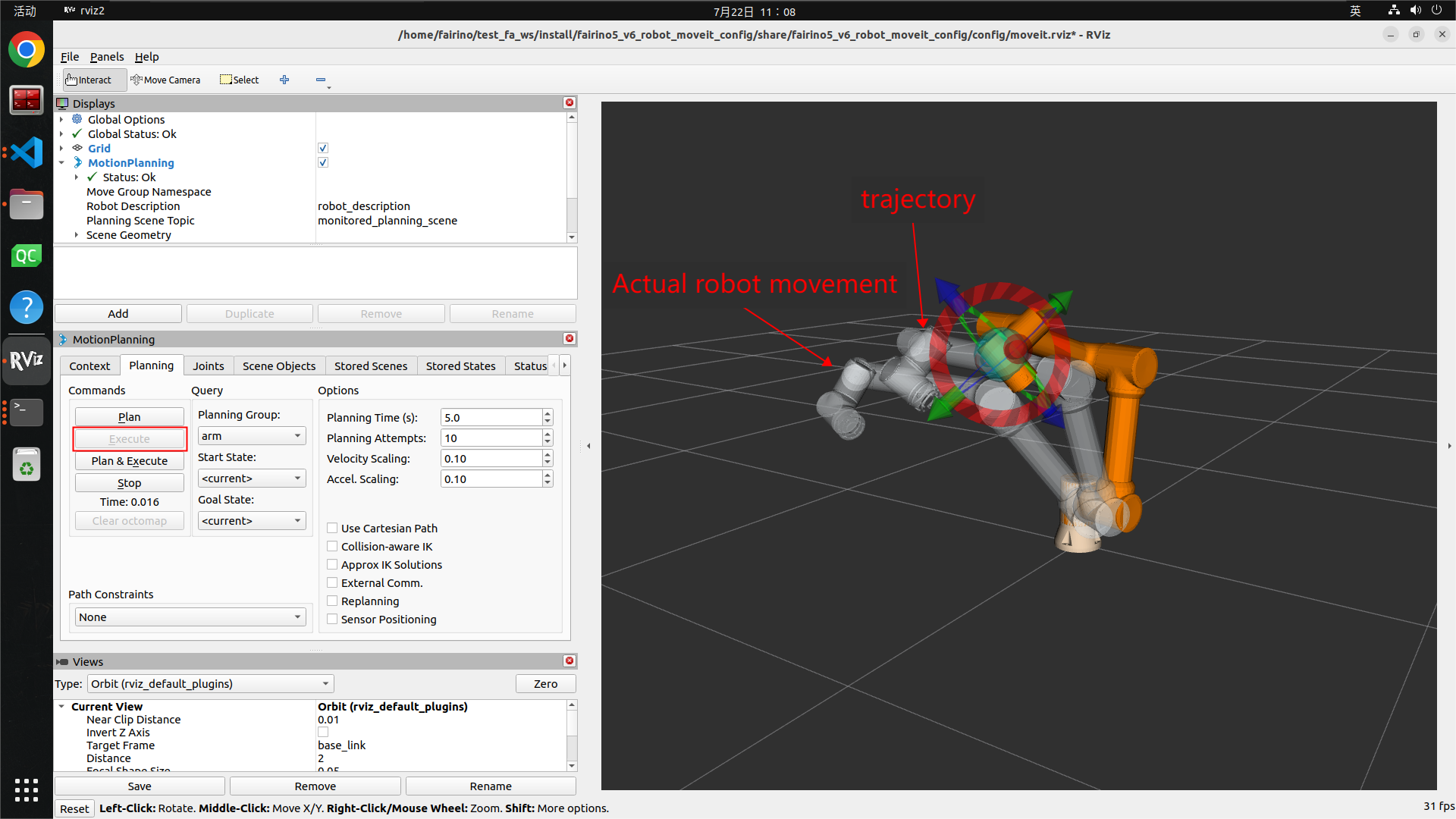
Przycisk „Plan&Execute” po zaplanowaniu trajektorii automatycznie steruje ruchem robota.
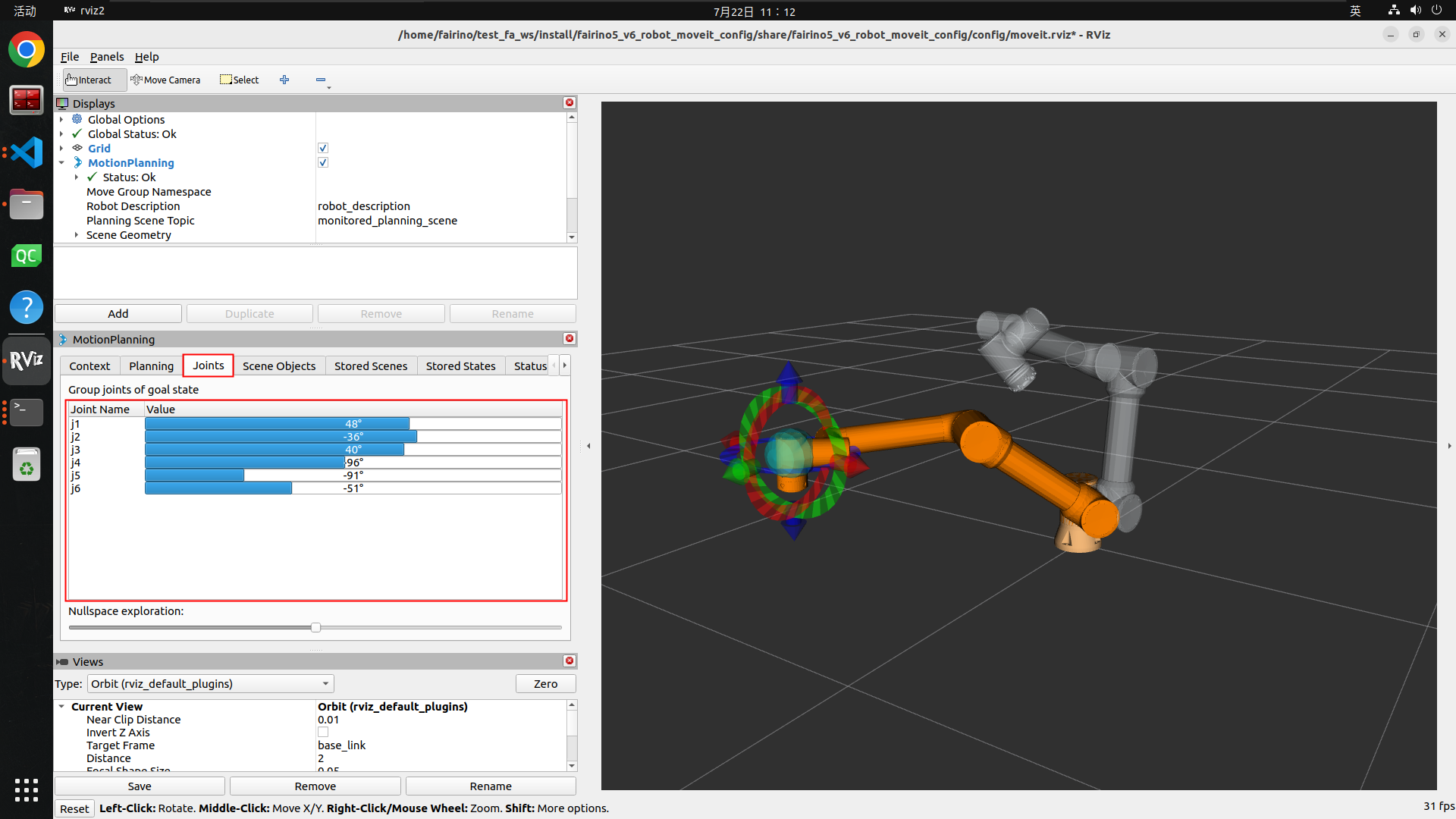
Następnie kliknij zakładkę „Joints”. Można zmienić docelową pozycję robota, zmieniając kąty poszczególnych stawów, a następnie za pomocą przycisków „Plan”, „Execute”, „Plan&Execute” wprawić robota w ruch.
2.3. Wtyczka fairino_hardware (niestandardowy pakiet konfiguracyjny moveit robota)
Wtyczka fairino_hardware jest warstwą pośredniczącą łączącą moveit z robotem. Za pośrednictwem wtyczki fairino_hardware move_group wysyła plan ruchu do moveit_control, który następnie przekazuje go do ros2_control. ros2_control z kolei za pośrednictwem wtyczki fairino_hardware wprawia w ruch rzeczywistego robota. Ponadto wtyczka fairino_hardware odbiera również dane zwrotne z rzeczywistego robota, umożliwiając synchronizację modelu robota w interfejsie symulacji rviz2 z rzeczywistym robotem. Dzięki temu użytkownik może za pośrednictwem interfejsu rviz2 wprawiać w ruch rzeczywistego robota.
Ponadto dzięki implementacji wtyczki fairino_hardware roboty FAIRINO mogą zostać włączone do struktury sterowania ros2_control, co umożliwia ich zgodność z pakietami firm trzecich opartymi na ros2_control.
W wtyczce fairino_hardware dostosowanej do wersji oprogramowania ramienia mechanicznego V3.8.3 dodano tryb momentu obrotowego oraz interfejs momentu obrotowego instrukcji, umożliwiając ramieniu mechanicznemu przejście w tryb momentu i odbieranie instrukcji momentu obrotowego.
2.3.1. Kompilacja wtyczki fairino_hardware
Skompiluj pakiet funkcjonalny wtyczki fairino_hardware w oficjalnie dostarczonym pakiecie funkcjonalnym ros2_ws. Po kompilacji, zgodnie z poprzednią sekcją dotyczącą kompilacji pakietu funkcjonalnego wtyczki fairino_hardware, w ścieżce
1ros2_ws/install/fairino_hardware/lib/fairino_hardware
powinien znajdować się wygenerowany plik .so wtyczki libfairino_hardware.so, co oznacza pomyślną kompilację wtyczki.
Należy pamiętać, że nazwy stawów robota w wtyczce fairino_hardware muszą być takie same jak nazwy stawów robota skonfigurowane w moveit2. W niniejszej wtyczce fairino_hardware nazwy sześciu stawów robota, od pozycji podstawy do końcówki, to odpowiednio j1, j2, j3, j4, j5, j6. Dlatego podczas konfiguracji robota w moveit2 należy nazwać stawy robota jako j1, j2, j3, j4, j5, j6.
2.3.2. Użycie wtyczki fairino_hardware
Jeśli używany jest niestandardowy pakiet konfiguracyjny moveit robota, przejdź do katalogu
1/home/fairino/test_fa_ws/install/fairino5_v6_robot_moveit_config/share/fairino5_v6_robot_moveit_config/config
i znajdź plik fairino5_v6_robot.ros2_control.xacro. W trzeciej linii tego pliku zmień parametr
1use_fake_hardware:=false
na
1use_fake_hardware:=true
Zgodnie z późniejszą instrukcją warunkową if, ustawienie use_fake_hardware na true oznacza włączenie wtyczki fairino_hardware/FairinoHardwareInterface. Zapisz plik i wyjdź.

Nazwa wtyczki „fairino_hardware/FairinoHardwareInterface” to nazwa ustawiona dla wtyczki hardware. Można ją sprawdzić w pliku fairino_hardware.xml w katalogu /home/fairino/ros2_ws/src/fairino_hardware.

Należy pamiętać, że parametr robot_control_mode w trzeciej linii pliku określa, jakie interfejsy instrukcji zostaną udostępnione podczas ładowania wtyczki. Parametr ten reprezentuje tryb sterowania: 0 to tryb sterowania pozycją, wtyczka udostępni interfejs position; 1 to tryb sterowania momentem, wtyczka udostępni interfejs effort. Wersja demonstracyjna dla interfejsu sterowania momentem zostanie prawdopodobnie wydana w pakiecie funkcjonalnym fairino_hardware dostosowanym do wersji oprogramowania ramienia mechanicznego V3.8.5.
Obecny kontroler Moveit2 obsługuje tylko tryb sterowania pozycją. Nie należy ustawiać robot_control_mode na 1.
2.3.3. Uruchomienie wtyczki
Otwórz terminal, przejdź do obszaru roboczego ros2_ws i wykonaj source, aby dodać wtyczkę fairino_hardware. Można również dodać tę ścieżkę do pliku „~/.bashrc”, ale nie jest to zalecane.
1cd ros2_ws
2source install/setup.bash
Następnie wróć do katalogu głównego, przejdź do obszaru roboczego test_fa_ws i wykonaj source, a następnie uruchom plik demo.launch.py.
1cd ..
2cd test_fa_ws
3source install/setup.bash
4ros2 launch fairino5_v6_robot_moveit_config demo.launch.py
2.3.4. Wynik działania
Po uruchomieniu pliku demo.launch.py interfejs rviz2 będzie wyglądał następująco:
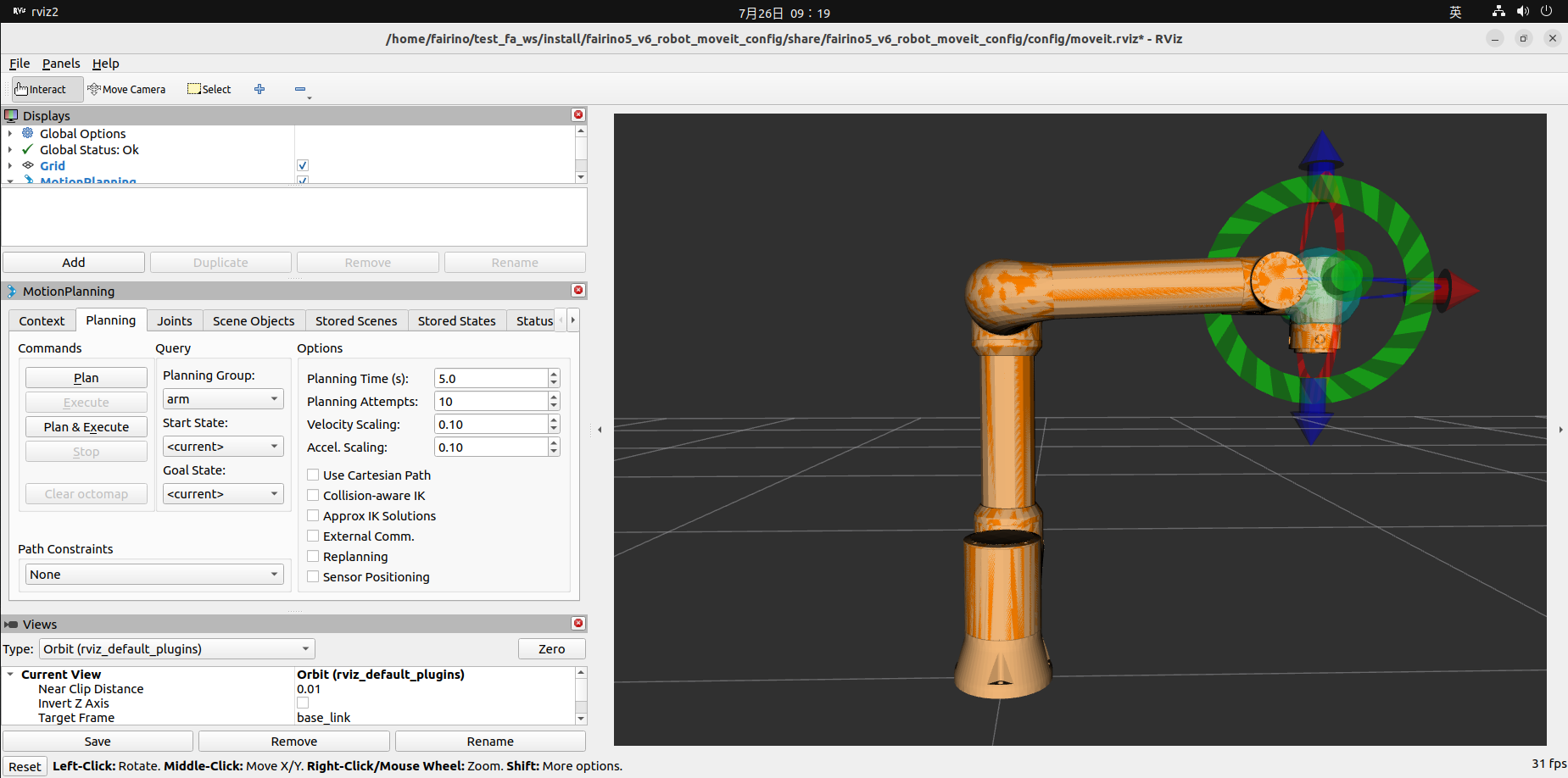
Główna różnica w porównaniu z interfejsem uruchomieniowym w sekcji 3.3.1 polega na początkowej pozycji robota. W tym przypadku, dzięki dodaniu wtyczki fairino_hardware, która odbiera w czasie rzeczywistym stany stawów rzeczywistego robota i przekazuje je przez ros2_control do move_group, steruje ona pozycją robota symulowanego w interfejsie rviz2, osiągając synchronizację między rzeczywistym robotem a robotem symulowanym w rviz2.
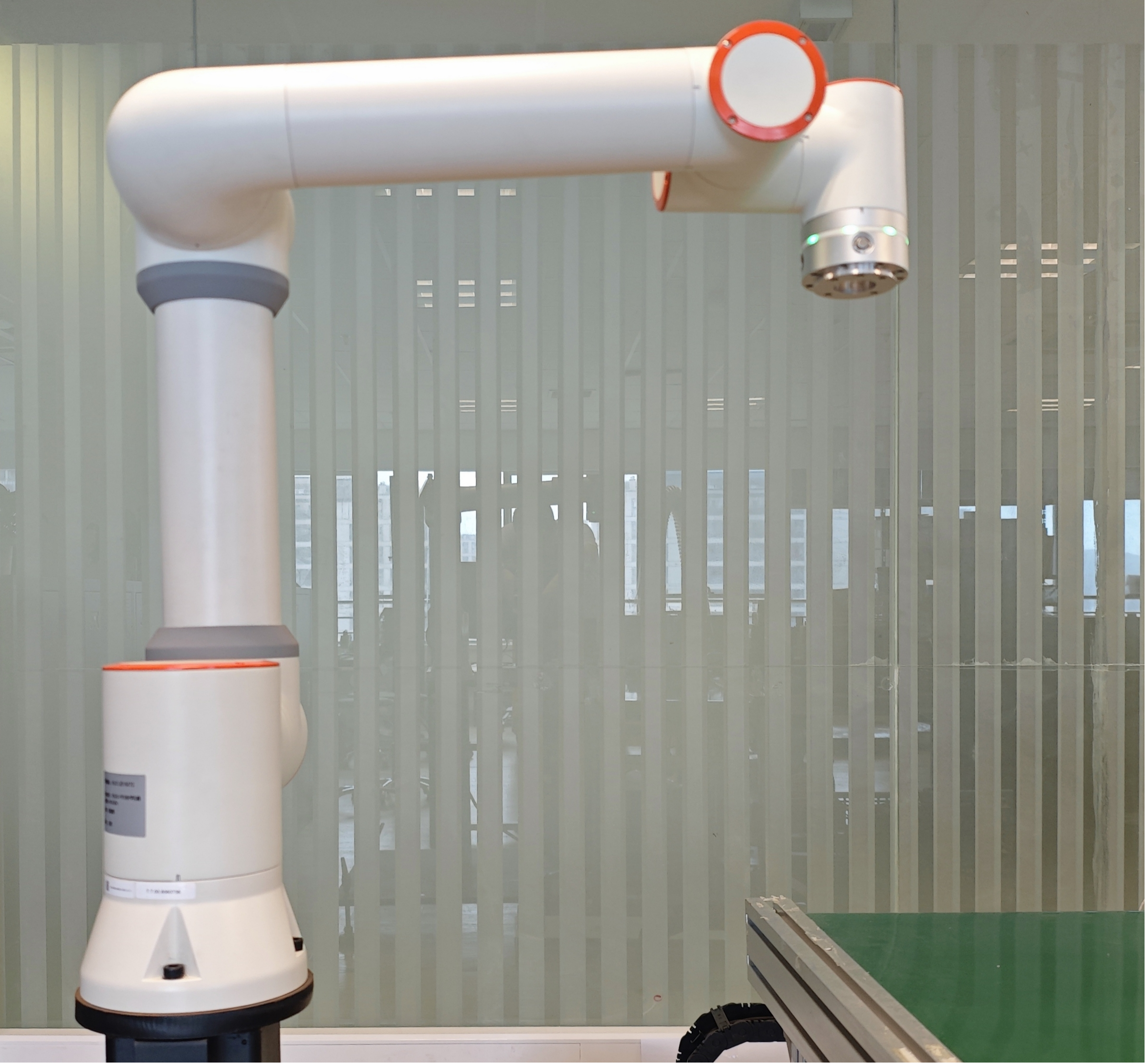
W tym momencie rzeczywista pozycja robota wygląda następująco:

Teraz można wprawić w ruch rzeczywistego robota za pośrednictwem interfejsu rviz2. Przeciągnij niebieską kulę na końcówce robota w interfejsie rviz2, aby przesunąć końcówkę robota do pozycji docelowej. Następnie przeciągnij kółka w kolorze czerwonym, zielonym i niebieskim na końcówce robota, aby zmienić jej orientację. Następnie kliknij przycisk „Planning&Execute” po lewej stronie, aby zaplanować trajektorię ruchu i wprawić robota w ruch. Zauważysz, że rzeczywisty robot i symulowany robot w interfejsie rviz2 poruszają się synchronicznie, zatrzymując się w docelowej pozycji i orientacji.
Poniższy rysunek przedstawia sterowanie za pomocą interfejsu rviz2 zarówno rzeczywistym robotem, jak i symulowanym robotem w interfejsie rviz2, aby dotarły do docelowej pozycji i orientacji:

W ten sposób można za pomocą moveit2 sterować synchronicznym ruchem rzeczywistego robota i symulowanego robota w interfejsie rviz2.
3. Przykładowy pakiet kodu mtc
3.1. Wprowadzenie do przykładowego pakietu kodu mtc
Przykładowy pakiet kodu mtc dostarcza przebudowany interfejs rviz2 wykorzystujący moveit2 i wtyczkę fairino_hardware. Zastępuje on oryginalną zakładkę MotionPlanning zakładką Motion Planning Tasks, służącą do wyświetlania poszczególnych etapów ruchu robota. Interfejs rviz2 można edytować za pomocą pliku „mtc.rviz” znajdującego się w ścieżce
1ros2_ws/install/fairino_mtc_demo/share/fairino_mtc_demo/launch
Użytkownik może edytować plik „mtc.rviz”, aby dostosować interfejs rviz2 do swoich potrzeb funkcjonalnych.
Ponadto przykładowy pakiet kodu mtc dostarcza przykładu, w którym robot za pomocą moveit2 i wtyczki fairino_hardware cyklicznie chwyta cel. Na podstawie tego przykładu użytkownik może dowiedzieć się, jak lepiej wykorzystywać moveit2 i wtyczkę fairino_hardware do interakcji z rzeczywistym robotem za pomocą kodu. Na tej podstawie użytkownik może przeprowadzić indywidualne dostosowania zgodne z własnymi potrzebami.
3.2. Kompilacja przykładowego pakietu kodu mtc
3.2.1. Klonowanie przykładowego pakietu kodu mtc
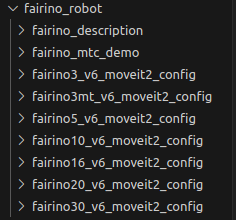
Sklonuj oficjalnie dostarczony przykładowy pakiet kodu mtc „fairino_robot” do katalogu src w obszarze roboczym ros2_ws.
3.2.2. Wybór modelu robota
W oficjalnie dostarczonym przykładowym pakiecie kodu mtc, w pliku mtc_demo_env.launch.py w katalogu
1ros2_ws/src/fairino_robot/fairino_mtc_demo/launch
wybierz model robota. Zmodyfikuj linie 9, 10 i 11 tego pliku, aby dopasować je do modelu robota, który ma zostać ustawiony.

Szczegółowe nazewnictwo modeli robotów można znaleźć w katalogu
1ros2_ws/src/fairino_robot/
w pakietach funkcjonalnych poszczególnych modeli robotów.
3.2.3. Kompilacja przykładowego pakietu kodu mtc
Kompilacja pakietu funkcjonalnego fairino_description
Otwórz terminal, przejdź do katalogu ros2_ws i skompiluj pakiet funkcjonalny fairino_description, a następnie wykonaj source.
1cd ros2_ws
2colcon build --packages-select fairino_description
3source install/setup.bash
Kompilacja pakietu funkcjonalnego robota
W katalogu ros2_ws skompiluj pakiet funkcjonalny odpowiadający modelowi robota. Na przykładzie robota FAIRINO5
1colcon build --packages-select fairino5_v6_moveit2_config
2source install/setup.bash
Następnie należy dodać wtyczkę fairino_hardware do synchronizacji z rzeczywistym robotem. Przejdź do katalogu
1ros2_ws/install/fairino5_v6_moveit2_config/share/fairino5_v6_moveit2_config/config
i znajdź plik fairino5_v6_robot.ros2_control.xacro. W 9. linii tego pliku zastąp
1<plugin>mock_components/GenericSystem</plugin>
przez
1<plugin>fairino_hardware/FairinoHardwareInterface</plugin>
Zapisz i wyjdź.

Kompilacja pakietu funkcjonalnego fairino_mtc_demo
Skompiluj pakiet funkcjonalny fairino_mtc_demo i wykonaj source.
1colcon build --packages-select fairino_mtc_demo
2source install/setup.bash
3.3. Uruchomienie przykładowego pakietu kodu mtc
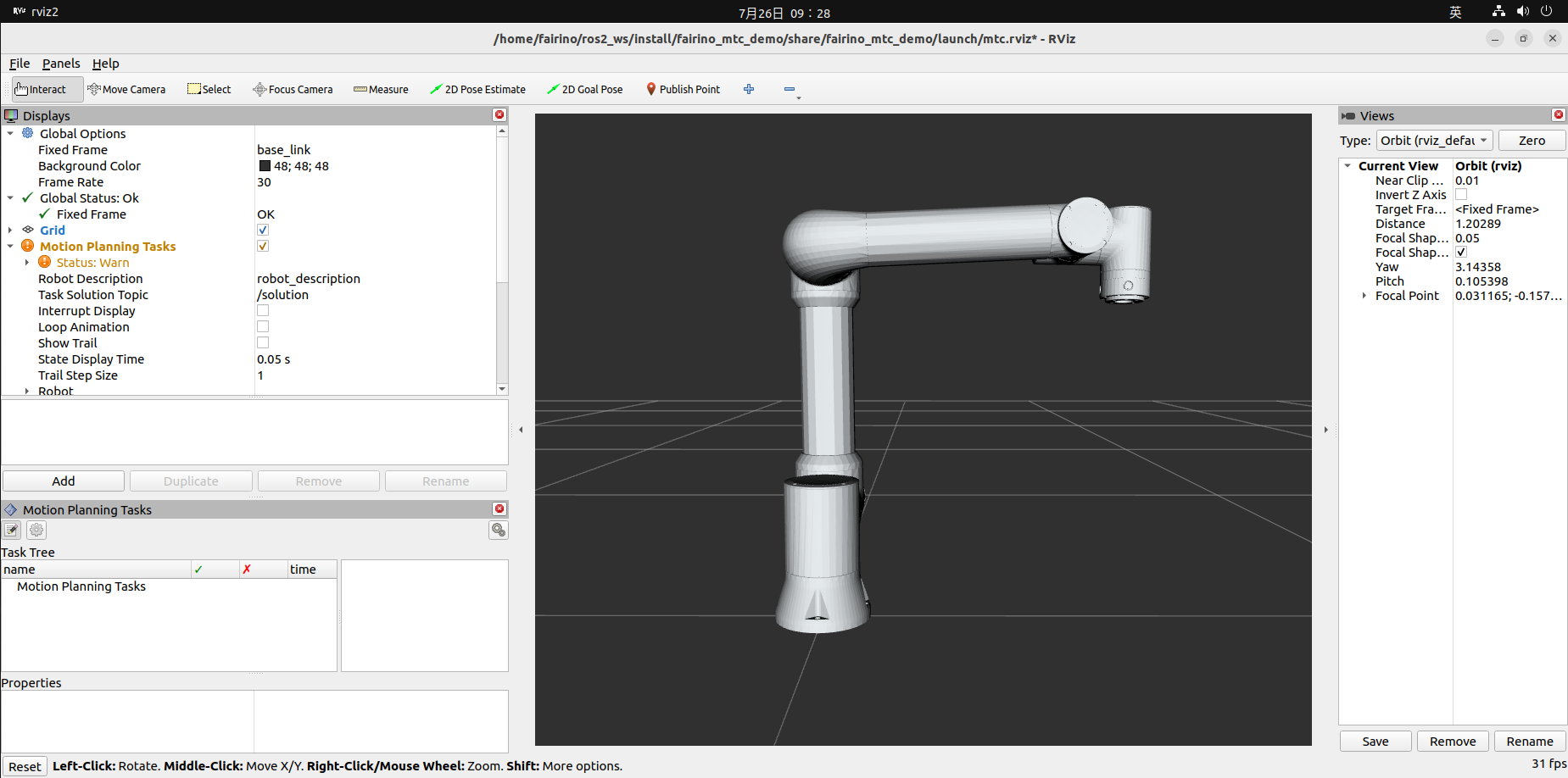
3.3.1. Interfejs rviz2
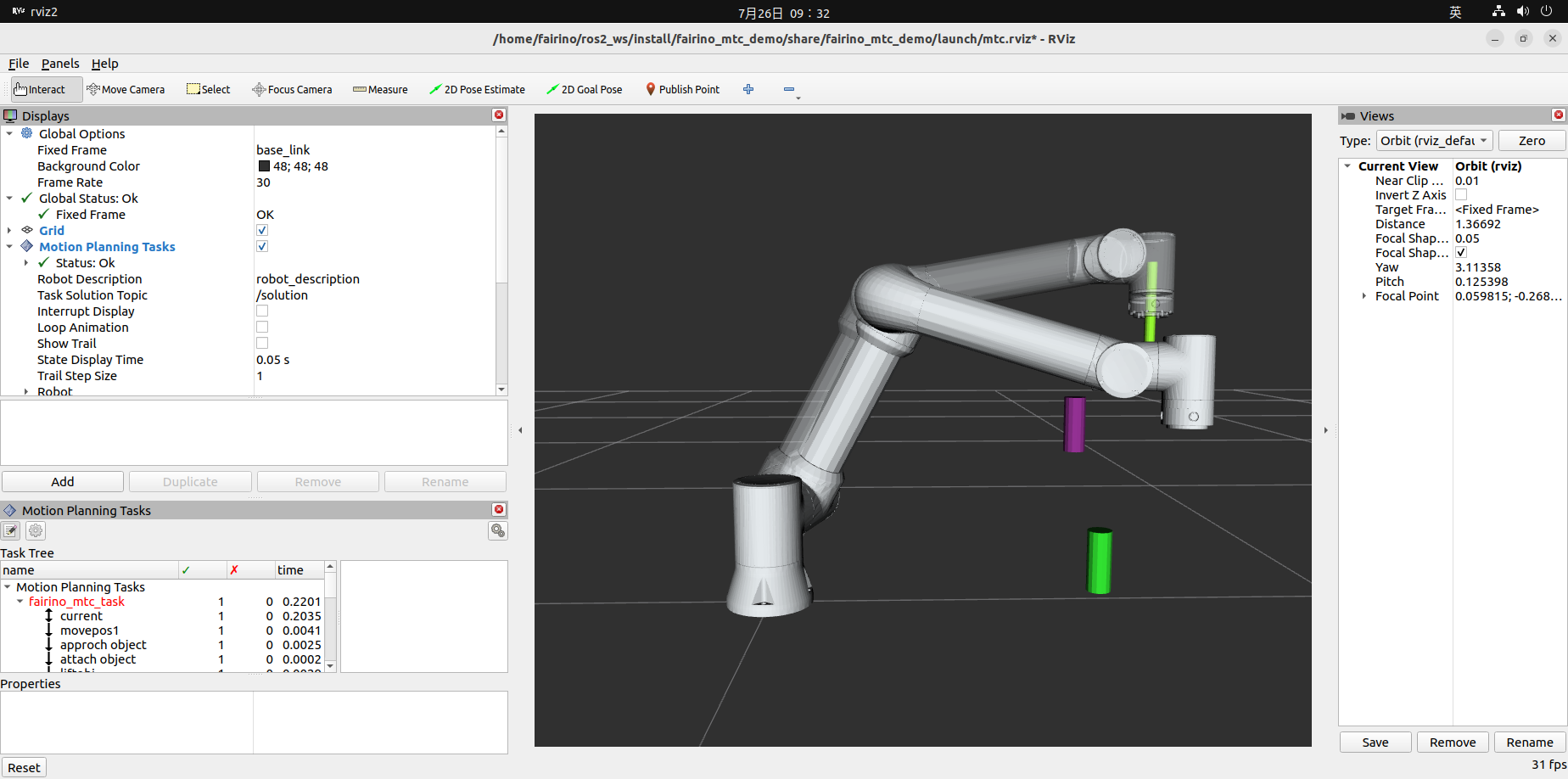
Uruchom plik mtc_demo_env.launch.py, aby otworzyć dostosowany interfejs rviz2. Zakładka Motion Planning Tasks służy do wyświetlania niestandardowych etapów ruchu robota.
1cd ros2_ws
2source install/setup.bash
3ros2 launch fairino_mtc_demo mtc_demo_env.launch.py
3.3.2. Ruch robota
Otwórz nowy terminal, przejdź do katalogu ros2_ws i wykonaj source, a następnie uruchom plik mtc_demo_app.launch.py, aby wykonać ruch robota.
1cd ros2_ws
2source install/setup.bash
3ros2 launch fairino_mtc_demo mtc_demo_app.launch.py
W zakładce Motion Planning Tasks w interfejsie rviz2 zostaną wyświetlone poszczególne etapy ruchu robota, a rzeczywisty robot i symulowany robot w interfejsie rviz2 będą poruszać się synchronicznie.

4. Uwagi
4.1. Synchronizacja wersji wtyczki fairino_hardware
Użycie wtyczki fairino_hardware wymaga, aby jej wersja była zgodna z wersją robota FAIRINO.
Wtyczka fairino_hardware odbiera dane zwrotne z robota FAIRINO i konwertuje je na typ danych instrukcji określony przez ros2_control, a następnie konwertuje dane ruchu robota wysyłane przez ros2_control na ramki danych specyficzne dla robota FAIRINO.
Z tego powodu zgodność typu danych wtyczki fairino_hardware z typem danych robota FAIRINO jest kluczowa. Różne wersje wtyczki i robota mogą prowadzić do różnych typów danych. Dlatego przed właściwym debugowaniem wtyczki fairino_hardware należy upewnić się, że wersja robota FAIRINO jest zgodna z wersją wtyczki fairino_hardware. W przeciwnym razie robot FAIRINO musi zostać zaktualizowany.
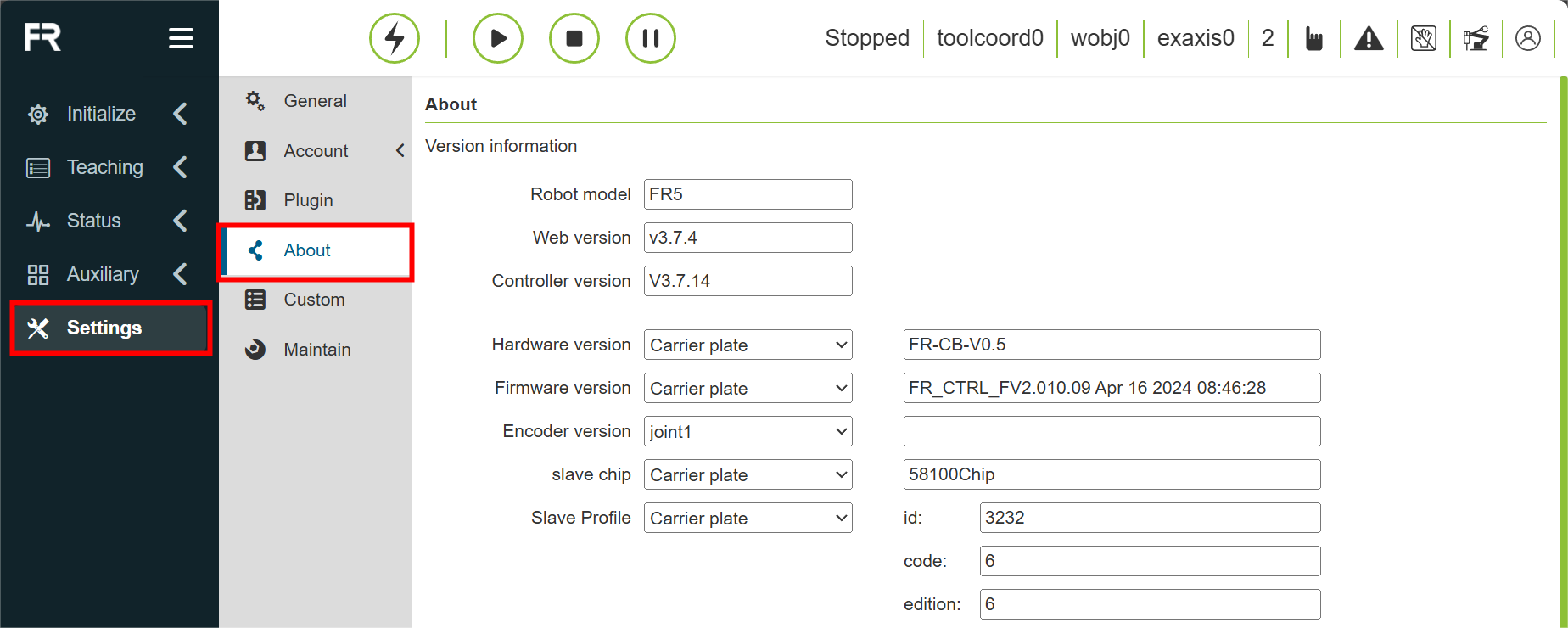
Najpierw można sprawdzić bieżące wersje robota w interfejsie „WebAPP -> Ustawienia systemowe -> Informacje” robota FAIRINO.
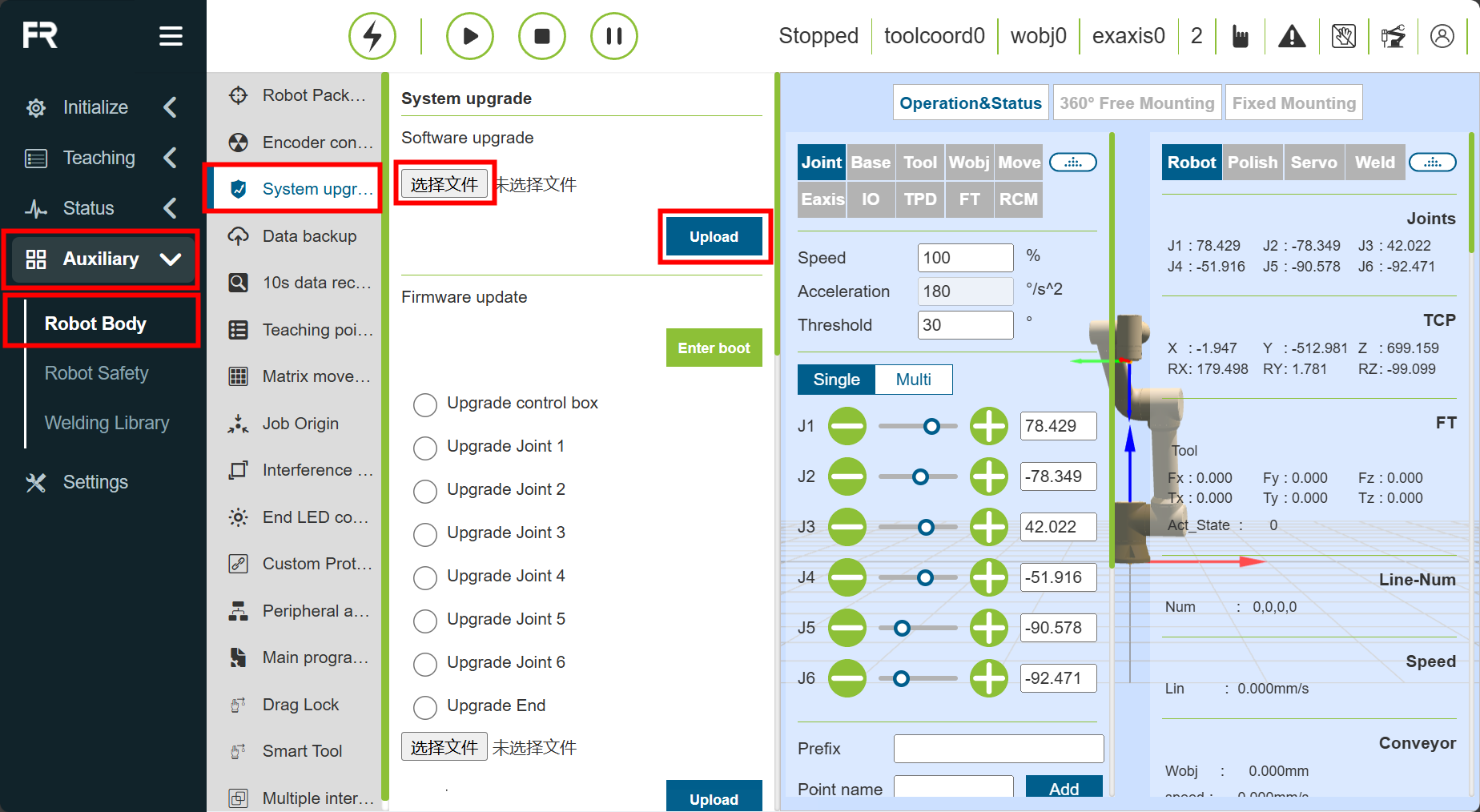
Następnie przygotuj oficjalnie dostarczony pakiet oprogramowania robota. Wejdź do interfejsu „WebAPP -> Aplikacje pomocnicze -> Robot -> Aktualizacja systemu” robota FAIRINO, kliknij przycisk „Wybierz plik”, wybierz przygotowany pakiet aktualizacyjny oprogramowania robota odpowiadający wersji wtyczki fairino_hardware, wybierz „Prześlij pakiet aktualizacyjny” i poczekaj na zakończenie aktualizacji oprogramowania.
Po zakończeniu aktualizacji system poprosi o ponowne uruchomienie robota. Przełącz przełącznik na skrzynce sterowniczej robota do pozycji wyłączenia, odczekaj około 25 sekund, a następnie włącz robota. W ten sposób aktualizacja wersji oprogramowania robota zostanie zakończona, umożliwiając kompilację i użycie wtyczki fairino_hardware.
4.2. Potencjalne problemy
4.2.1. Problem z ładowaniem modelu robota po prawej stronie podczas konfiguracji pakietu robota.
Rozwiązanie: Ten błąd może wynikać z nieprawidłowej ścieżki w pliku .urdf. Można go rozwiązać, modyfikując ścieżkę w pliku .urdf i kopiując folder meshes do katalogu install/test_moveit/share/test_moveit w obszarze roboczym.
4.2.2. Błąd po wygenerowaniu pakietu podczas uruchamiania.
Rozwiązanie: Usuń „[”capabilities”]” z 203 linii w pliku launches.py: default_value=moveit_config.moveit_capabilities[„capabilities”].
5. Podsumowanie
Niniejsza instrukcja opisuje instalację, konfigurację i używanie wtyczki MoveIt2; instalację i używanie wtyczki fairino_hardware w celu synchronizacji ruchu symulowanego robota rviz2 z rzeczywistym robotem; oraz kompilację i uruchomienie przykładowego pakietu kodu mtc, umożliwiającego realizację niestandardowych funkcji za pomocą moveit2 i wtyczki fairino_hardware.
Mamy nadzieję, że dzięki temu podręcznikowi użytkownicy zyskają pełniejsze zrozumienie wtyczek MoveIt2 i fairino_hardware i będą mogli lepiej dostosowywać funkcje robota FAIRINO do swoich indywidualnych potrzeb.