4. Ręczne uczenie robota
4.1. Ręczne uczenie i zapisywanie punktów uczenia
Ręczne uczenie obejmuje dwa sposoby:
Przytrzymanie przycisku przeciągania na końcówce w celu wykonania przeciągania uczącego;
Punktowanie w trójwymiarowej symulacji robota -> operacje na obiekcie trójwymiarowym.
Po wyuczeniu pozycji docelowej można zapisać punkt uczenia w „Funkcje dodatkowe robota” -> „Zapis punktu uczenia”. Podczas zapisywania punktu uczenia, układ współrzędnych tego punktu uczenia jest układem współrzędnych aktualnie stosowanym przez robota.
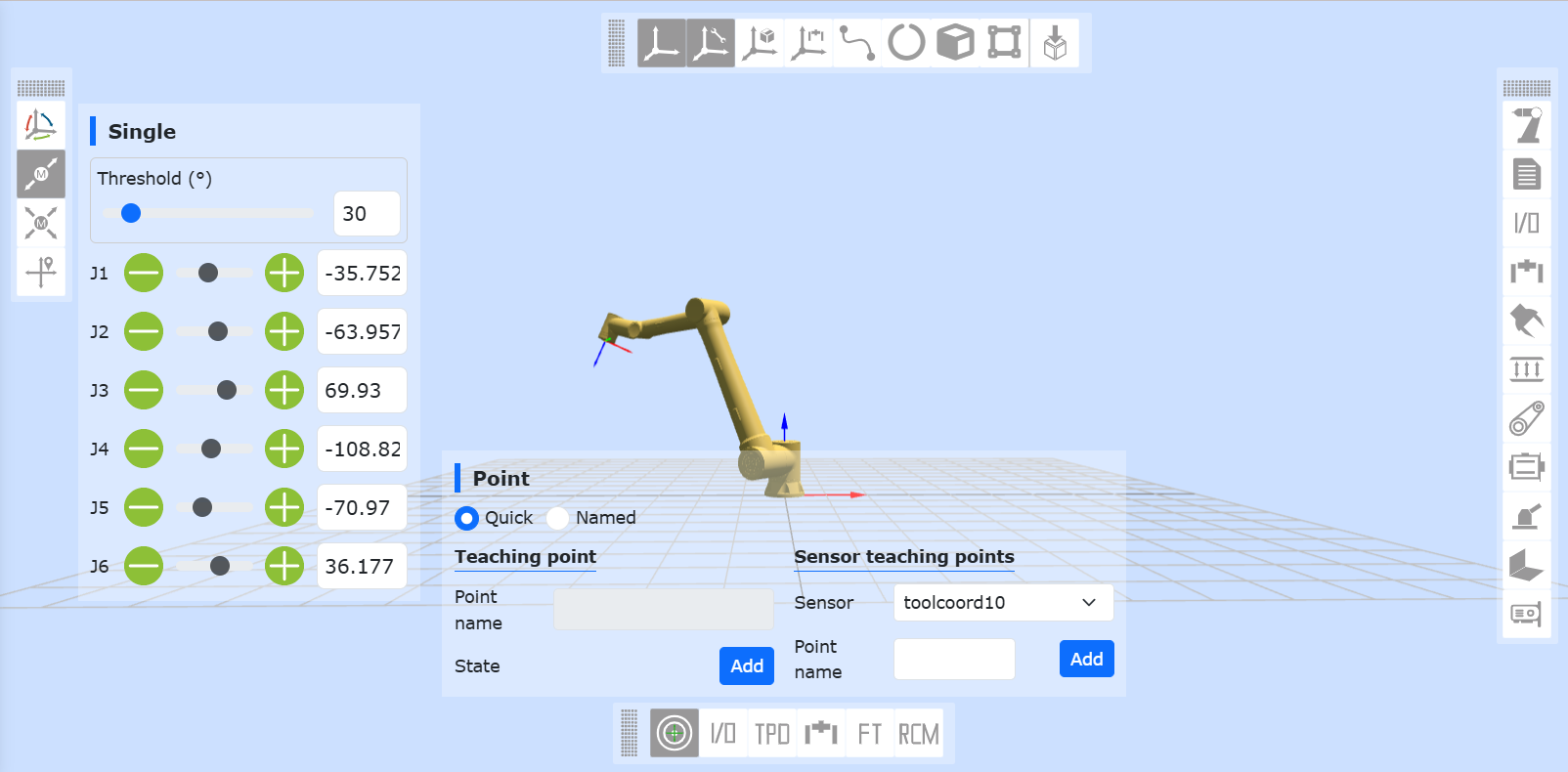
Wykres 4.1‑1 Ręczne uczenie
4.2. Przeglądanie informacji o punktach uczenia
Kliknięcie „Program uczenia” -> „Punkty uczenia” spowoduje wyświetlenie wszystkich zapisanych informacji o punktach uczenia. Bieżący tryb punktów dzieli się na „Tryb systemowy” i „Tryb tabeli punktów”.
W tym interfejsie można importować i eksportować pliki punktów uczenia. Po wybraniu punktu uczenia i kliknięciu przycisku „Usuń” można usunąć informacje o tym punkcie. Wartości x, y, z, rx, ry, rz i v punktu uczenia można modyfikować. Wprowadź nowe wartości, zaznacz pole wyboru po lewej stronie, a następnie kliknij przycisk „Modyfikuj” u góry, aby zmodyfikować informacje o punkcie uczenia.
Kliknięcie przycisku „Rozpocznij działanie” spowoduje uruchomienie pojedynczego punktu uczenia lokalnego, przesuwając robota do pozycji tego punktu. Ponadto użytkownik może wyszukiwać punkty uczenia według nazwy.
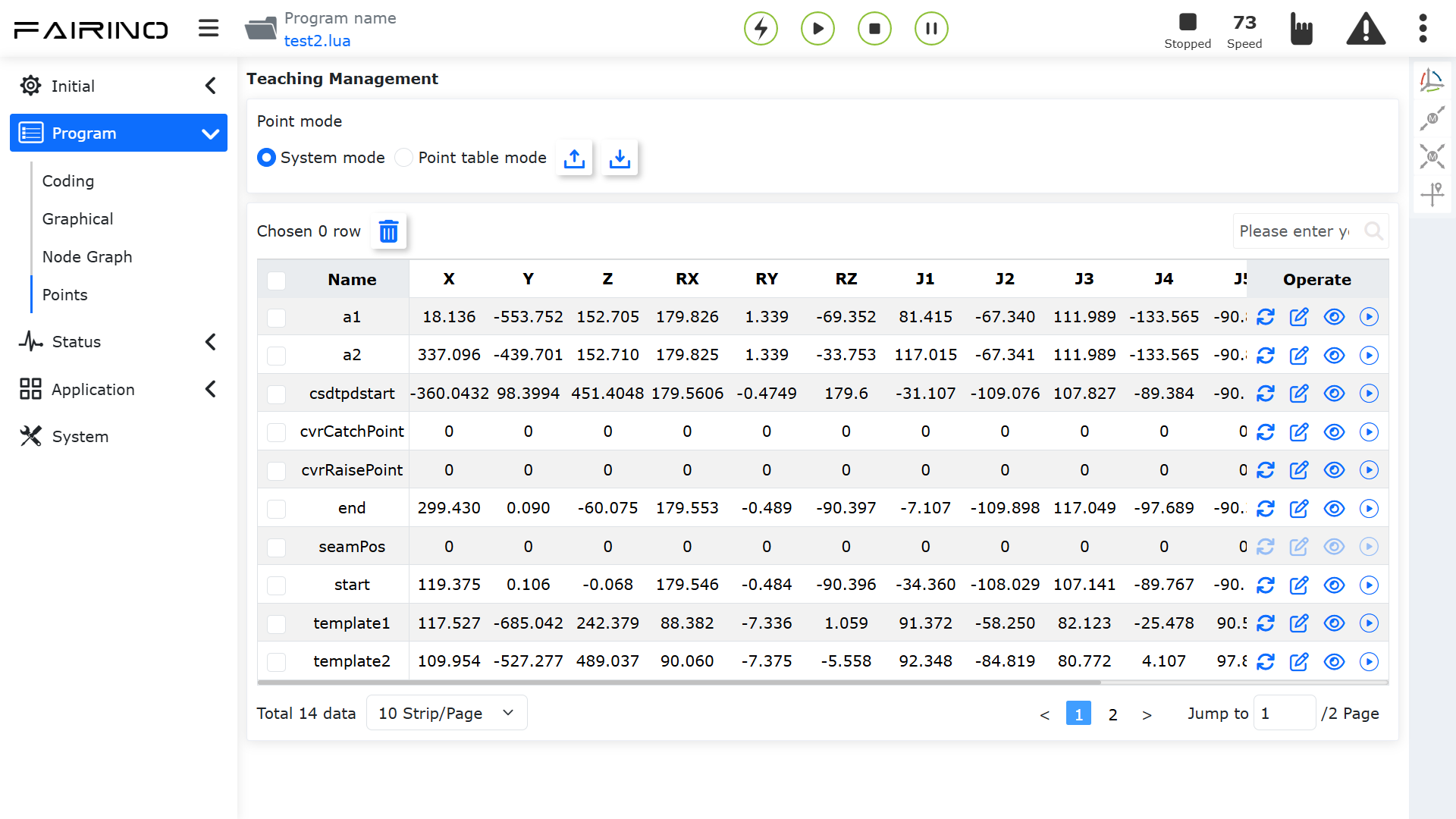
Wykres 4.2‑1 Interfejs zarządzania punktami uczenia
Ważne
Zmodyfikowane wartości x, y, z, rx, ry, rz punktu uczenia nie mogą przekraczać zakresu roboczego robota.