2. Logowanie do WebApp
2.1. Interfejs logowania do WebApp
Włącz skrzynkę sterowniczą i podłącz kabel sieciowy do komputera PC;
Na komputerze PC otwórz przeglądarkę chrome i wejdź na docelowy adres URL 192.168.58.2;
Wprowadź nazwę użytkownika i hasło, a następnie kliknij „Zaloguj”, aby uzyskać dostęp do WebApp.
Domyślna nazwa użytkownika to admin, hasło to 123.
Wykres 2.1‑1 Interfejs logowania
2.2. Proste poznanie interfejsu WebApp
Po pomyślnym zalogowaniu system przechodzi do „Interfejsu początkowego”, który zawiera głównie:
Logo FAIRINO;
Przycisk zwijania paska menu;
Pasek menu;
Obszar sterowania robotem;
Obszar stanu robota;
Symulacja 3D robota – operacje w scenie 3D;
Symulacja 3D robota – operacje na samym robocie;
Funkcje dodatkowe robota;
Stan robota i funkcji dodatkowych.
Poniżej znajduje się schemat początkowego interfejsu systemu:
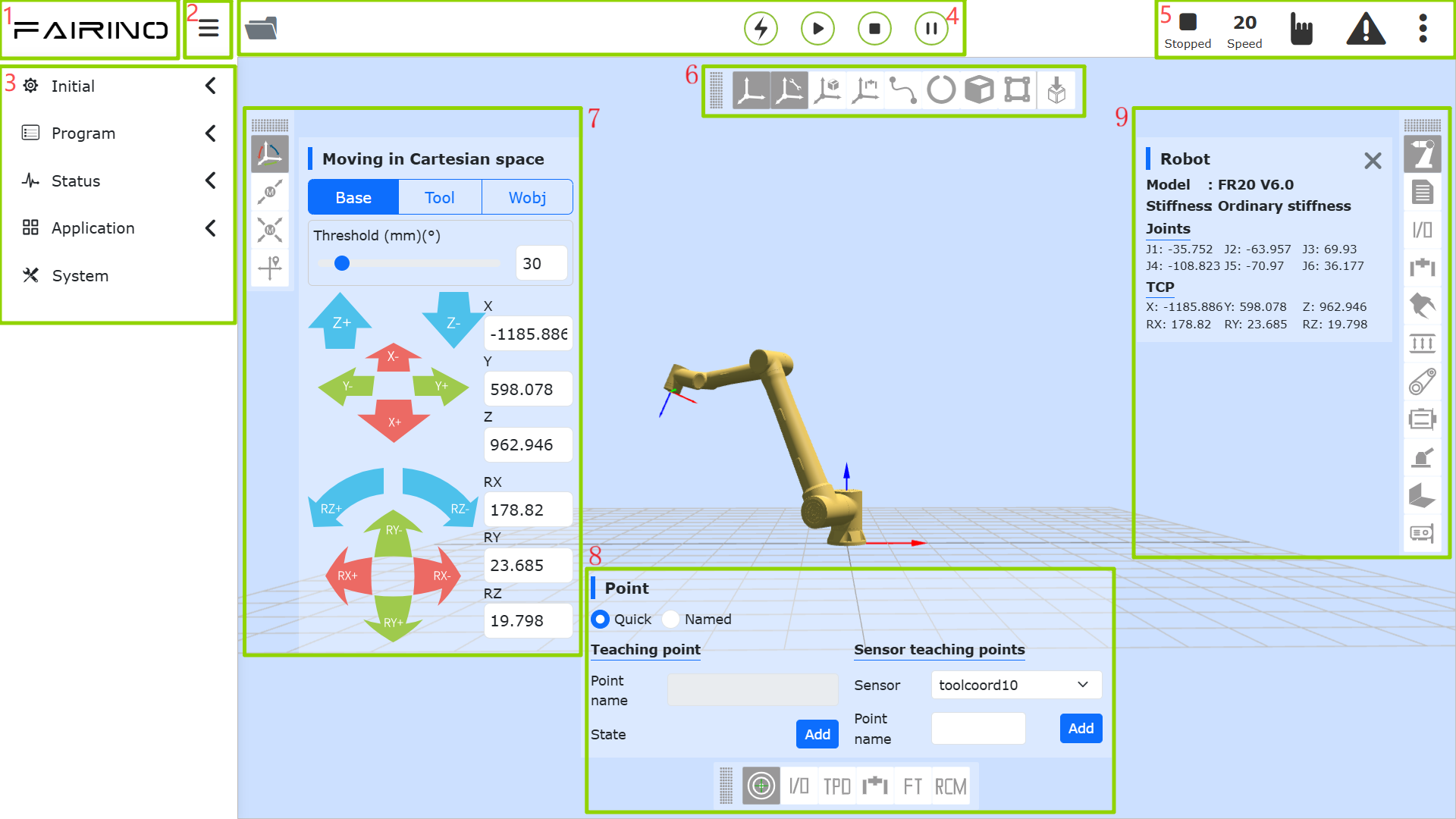
Wykres 2.2‑1 Schemat początkowego interfejsu systemu
2.2.1. Obszar sterowania
Informacja

Nazwa: Przycisk otwierania programu示教
Funkcja: Otwiera program示教 do programowania, programowania graficznego i programowania z użyciem grafów węzłów.
Informacja

Nazwa: Przycisk włączenia zasilania
Funkcja: Włącza robota.
Informacja

Nazwa: Przycisk Start
Funkcja: Przesyła i uruchamia program示教.
Informacja

Nazwa: Przycisk Stop
Funkcja: Zatrzymuje aktualnie działający program示教.
Informacja

Nazwa: Przycisk Wstrzymaj/Wznów
Funkcja: Wstrzymuje i wznawia aktualny program示教.
Ważne
Instrukcja wstrzymania na końcu programu nie może być oceniona.
2.2.2. Pasek stanu
Informacja

Nazwa: Stan błędu działania robota
Funkcja: Robot działa z błędem; gdy nie ma błędu, jest ukryty.
Informacja

Nazwa: Stan robota
Funkcja: Stopped - zatrzymany, Running - działa, Pause - wstrzymany, Drag - przeciąganie.
Informacja

Nazwa: Układ narzędzia robota, układ przedmiotu, układ dodatkowej osi i numer obciążenia
Funkcja: Lewy górny – bieżący numer układu narzędzia, prawy górny – bieżący numer układu przedmiotu, lewy dolny – bieżący numer układu dodatkowej osi, prawy dolny – bieżący numer obciążenia.
Informacja

Nazwa: Procent prędkości roboczej
Funkcja: Prędkość robota podczas pracy w bieżącym trybie.
Informacja

Nazwa: Tryb automatyczny
Funkcja: Automatyczny tryb pracy robota. Po przełączeniu z ręcznego na automatyczny i ustawieniu prędkości globalnej, prędkość globalna zostanie automatycznie dostosowana do ustawionej prędkości.
Informacja

Nazwa: Tryb ręczny
Funkcja: Ręczny tryb robota, umożliwiający示教 robota.
Informacja

Nazwa: Przycisk zwijania/rozwijania stanu robota
Funkcja: Zwijanie/rozwijanie informacji o: układzie narzędzia, układzie przedmiotu, układzie dodatkowej osi, obciążeniu, stanie przeciągania robota, trybie lokalnym/zdalnym, stanie połączenia robota, trybie BOOT i informacji o koncie.
Po kliknięciu przycisku zwijania można wyświetlić następujące informacje o stanie.
Informacja

Nazwa: Numer układu narzędzia
Funkcja: Wyświetla bieżący numer używanego układu narzędzia.
Informacja

Nazwa: Numer układu przedmiotu
Funkcja: Wyświetla bieżący numer używanego układu przedmiotu.
Informacja

Nazwa: Numer układu dodatkowej osi
Funkcja: Wyświetla bieżący numer używanego układu dodatkowej osi.
Informacja

Nazwa: Obciążenie
Funkcja: Wyświetla aktualną masę obciążenia oraz współrzędne środka ciężkości X, Y, Z.
Informacja

Nazwa: Stan przeciągania robota
Funkcja: Robot może być obecnie przeciągany.
Informacja

Nazwa: Stan przeciągania robota
Funkcja: Robot nie może być obecnie przeciągany.
Informacja

Nazwa: Tryb lokalny robota
Funkcja: Robot jest aktualnie sterowany przez skrzynkę sterowniczą.
Informacja

Nazwa: Tryb zdalny robota
Funkcja: Robot może być obecnie sterowany tylko przez PLC.
Informacja

Nazwa: Stan połączenia
Funkcja: Robot jest podłączony.
Informacja
Nazwa: Stan rozłączenia
Funkcja: Robot nie jest podłączony.
Informacja

Nazwa: Informacje o koncie
Funkcja: Wyświetla nazwę użytkownika, uprawnienia oraz opcję wylogowania.